
一种自动搬砖机器人.pdf

雅云****彩妍

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动搬砖机器人.pdf
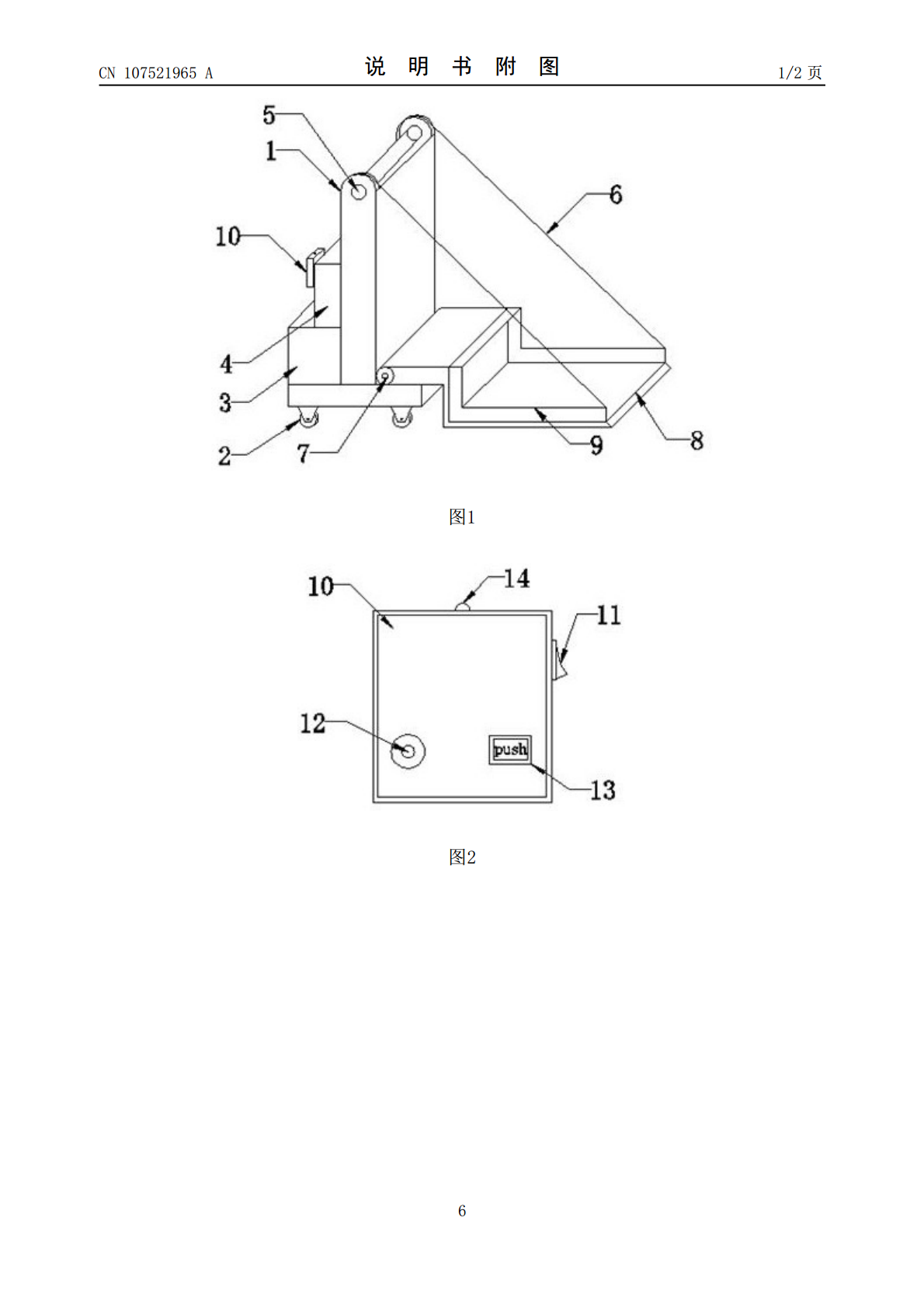
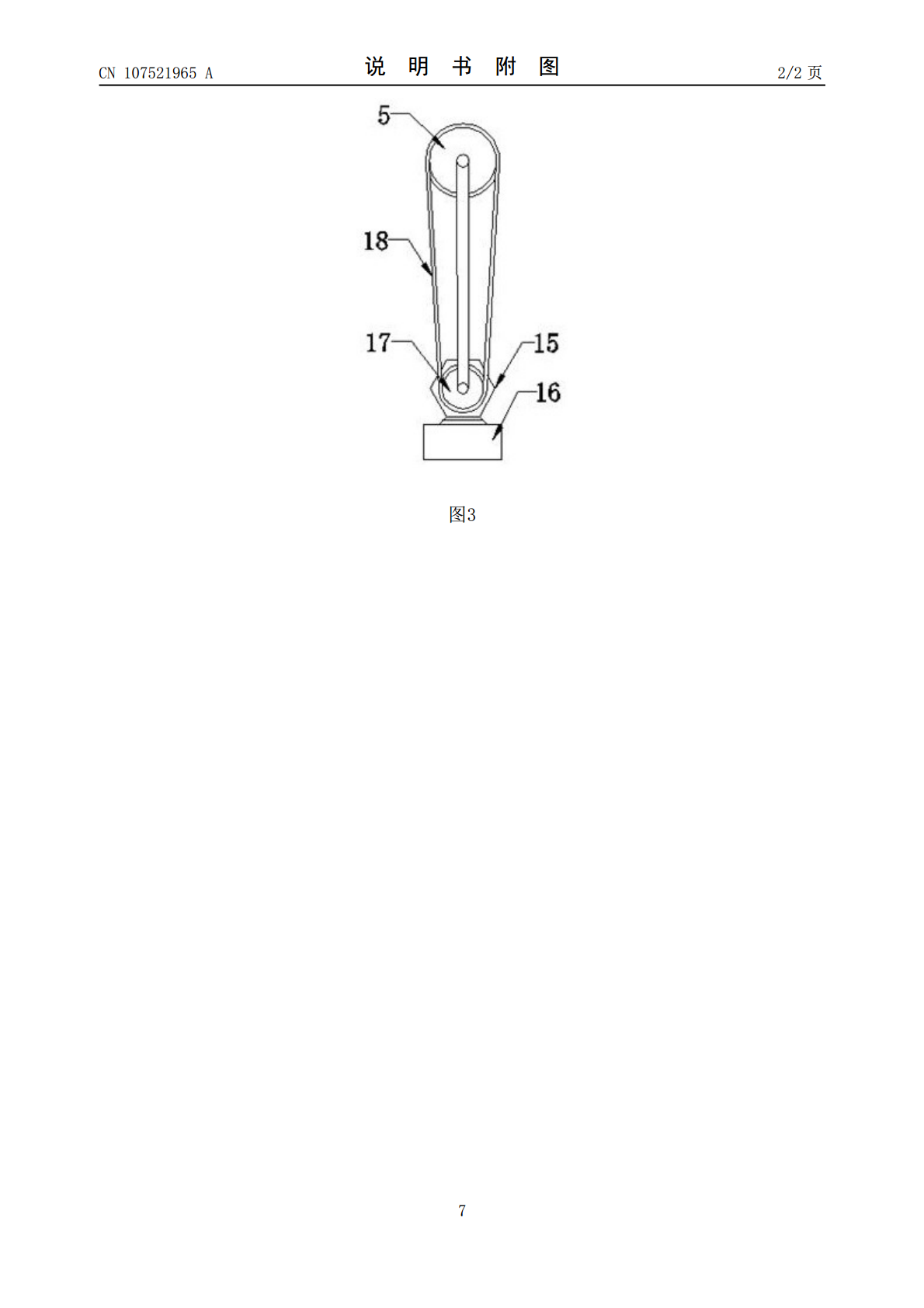
本发明公开了一种自动搬砖机器人,包括主机体,主机体的顶部设有从动轮,从动轮与主机体通过轴承固定连接,主机体左侧中部设有主控箱,主控箱左侧设有遥控器,遥控器与主控箱信号传输连接,主控箱下部设有配重箱,配重箱是由密封箱灌沙制成,主机体下部设有电动轮,电动轮与主机体通过螺栓固定连接,主机体右侧底部设有转轴,转轴是由合金轴经车床车削制成,从动轮上部设有拉动缆绳,拉动缆绳与从动轮紧密连接,转轴右侧设有插砖板,插砖板与转轴通过螺栓固定连接,插砖板上部设有挡板,该种自动搬砖机器人,具有较高的智能化,可以减少复杂的操作,

一种搬砖机器人.pdf
本发明公布了一种搬砖机器人,包括底座、大臂驱动气缸、大臂、小臂驱动气缸、小臂、旋转气缸、夹紧装置以及调整机构;所述底座安装在履带上,所述履带上安装有主动轮,主动轮通过旋转电机驱动;所述大臂驱动气缸与大臂之间设有连接臂,连接臂顶部设有第一转轴,所述小臂驱动气缸与小臂之间设有第二转轴,所述旋转气缸固定在第二转轴上,小臂固定在旋转气缸的输出轴上,小臂与夹紧装置之间设有第三转轴,调整机构驱使第三转轴转动并调整夹紧装置的倾斜度;本机器人结构简单并且紧凑,容易操作,操作过程中能够在搬动砖块并移动位置,在夹持砖块的过程
一种自动搬砖机.pdf
本发明公开了一种自动搬砖机,包括机架,设在机架上的第一、第二行走小车和气缸夹持机构,第二行走小车横向移动,其上安装有由卷升电机减速机驱动的卷升轮,卷升轮上缠绕有提升链条,提升链条的自由端连接有气缸夹持机构,在气缸夹持机构与第二行走小车之间设有升降杆,卷升电机减速机的输出轴上设有提升编码器,气缸夹持机构由提升链条和升降杆驱动其上下移动。本发明自动搬砖机,用链条来驱动气缸夹持机构,定位准确,夹砖稳固,设备运行平稳,生产效率高。
一种墙砖自动堆砌机器人.pdf
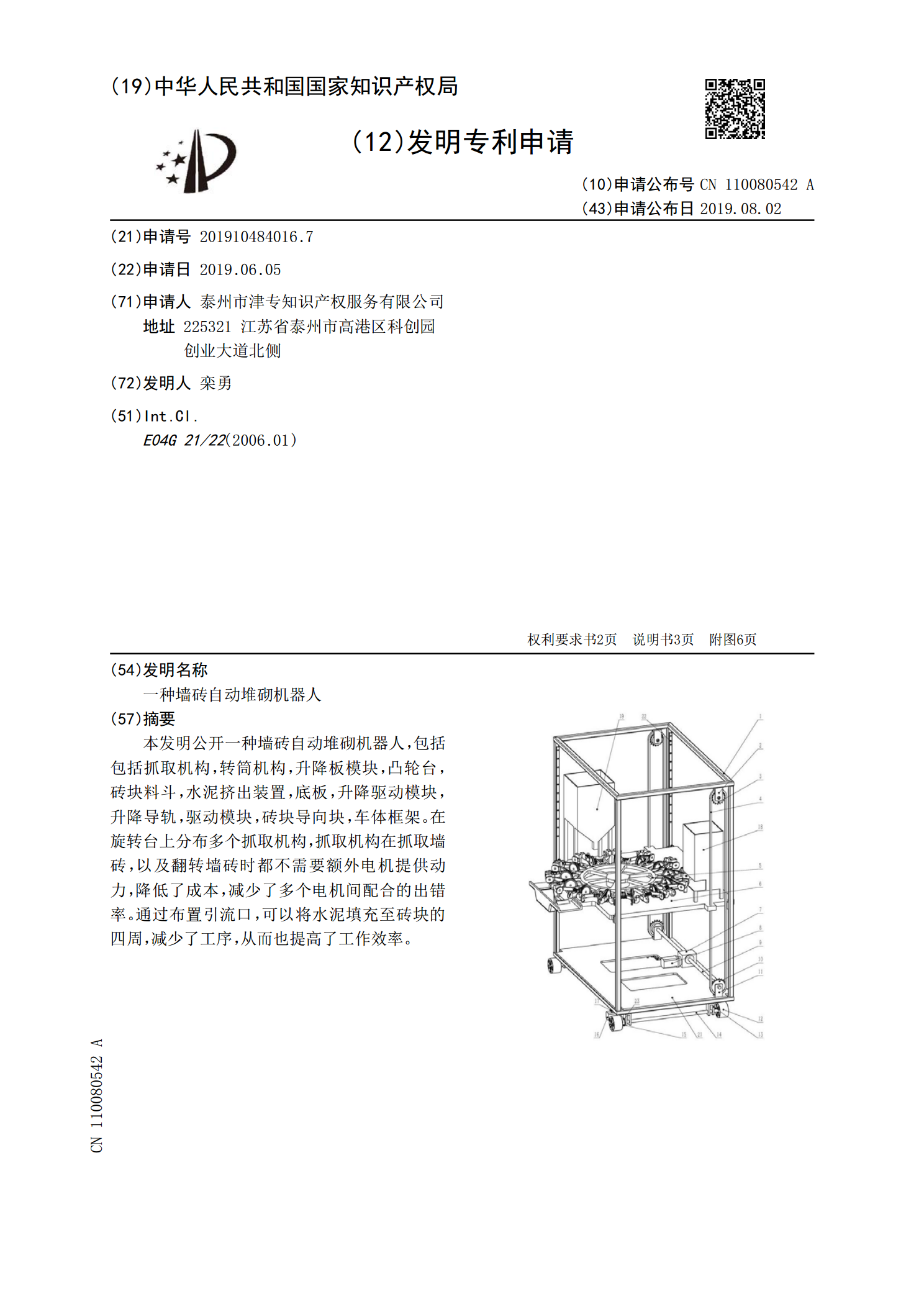
本发明公开一种墙砖自动堆砌机器人,包括包括抓取机构,转筒机构,升降板模块,凸轮台,砖块料斗,水泥挤出装置,底板,升降驱动模块,升降导轨,驱动模块,砖块导向块,车体框架。在旋转台上分布多个抓取机构,抓取机构在抓取墙砖,以及翻转墙砖时都不需要额外电机提供动力,降低了成本,减少了多个电机间配合的出错率。通过布置引流口,可以将水泥填充至砖块的四周,减少了工序,从而也提高了工作效率。

一种带螳螂臂及自动调整机构的搬砖机.pdf
本发明公开了一种带螳螂臂及自动调整机构的搬砖机,包括第一支撑架、调节架气缸夹持总成和抓举矫正机构,所述第一支撑架的上端安装有齿轮驱动机构总成,且齿轮驱动机构总成包括垫板和安装在垫板上端的涡轮减速箱支架,所述涡轮减速箱支架的两端设置有驱动齿轮座,且驱动齿轮座上通过轴承安装有驱动齿轮,且驱动齿轮通过输出轴联轴器连接涡轮减速器,所述涡轮减速器通过输入轴联轴器连接变频电机,该搬砖机相比现有技术至少存在以下有益效果:1)能够大幅度降低工人的体力劳动,保障工人的健康安全;2)能够节约企业的生产成本;3)能够降低工人操