
一种用于横切的免编程电子凸轮曲线生成方法.pdf

是你****优呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于横切的免编程电子凸轮曲线生成方法.pdf
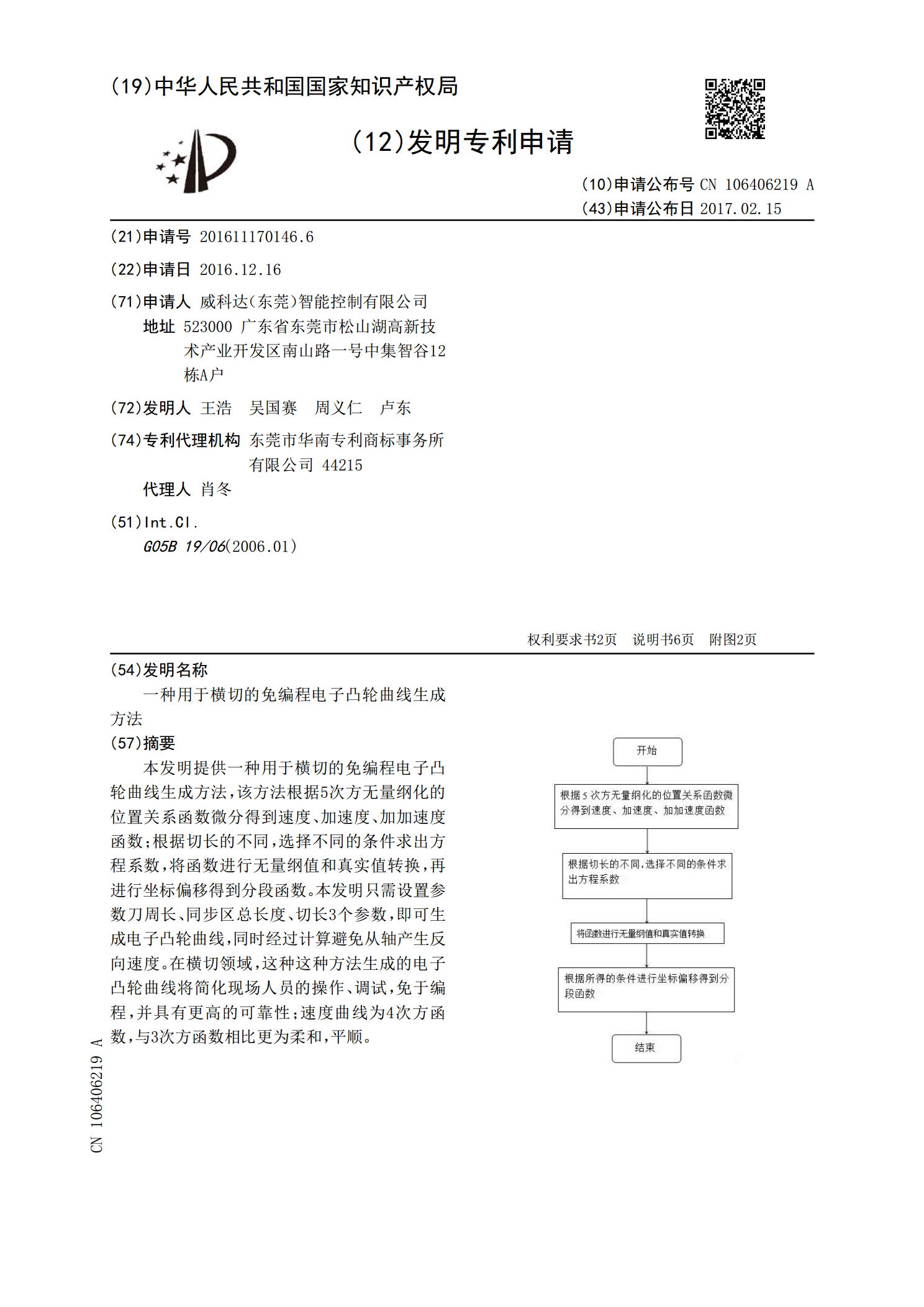
本发明提供一种用于横切的免编程电子凸轮曲线生成方法,该方法根据5次方无量纲化的位置关系函数微分得到速度、加速度、加加速度函数;根据切长的不同,选择不同的条件求出方程系数,将函数进行无量纲值和真实值转换,再进行坐标偏移得到分段函数。本发明只需设置参数刀周长、同步区总长度、切长3个参数,即可生成电子凸轮曲线,同时经过计算避免从轴产生反向速度。在横切领域,这种这种方法生成的电子凸轮曲线将简化现场人员的操作、调试,免于编程,并具有更高的可靠性;速度曲线为4次方函数,与3次方函数相比更为柔和,平顺。

一种用于瓦楞纸前缘送纸的免编程电子凸轮曲线生成方法.pdf
本发明涉及电子凸轮技术领域,具体涉及一种用于瓦楞纸前缘送纸的免编程电子凸轮曲线生成方法,该方法根据5次方无量纲化的位置关系函数微分得到速度、加速度;再根据瓦楞纸前缘送纸的轴运动特性给出初始条件并确定无量纲函数系数,将函数进行真实值和无量纲值转换,并根据设定的加速距离、同步距离、减速距离确定自变量的分段;最后根据所得的条件进行坐标偏移得到分段函数。本发明中所述免编程电子凸轮曲线生成方法只需设置加速距离、同步距离、减速距离,即自动生成电子凸轮曲线,这种这种方法生成的电子凸轮曲线将简化现场人员的操作、调试,并具

一种电子凸轮曲线生成方法.pdf
本发明提供了一种电子凸轮曲线生成方法,该方法根据在实际电子凸轮曲线上确定的个主从轴位置点(,)使用分段三次样条函数生成电子凸轮曲线。其中,主轴位置满足()。该方法把对主轴位置()参数化成,因为使得满足。根据给定的边界条件并使用追赶法计算出()共个区间的函数的系数。利用公式对当前时刻主轴位置参数化,判断所属区间,根据相应区间的函数计算当前时刻主轴位置对应的从轴位置,即生成电子凸轮曲线。本发明方法不必知道凸轮速度、凸轮加速度等参数就可生成电子凸轮曲线,与传统电子凸轮曲线生成方法相比具有通用性和灵活性,且计算简
电子凸轮控制装置以及电子凸轮曲线生成方法.pdf
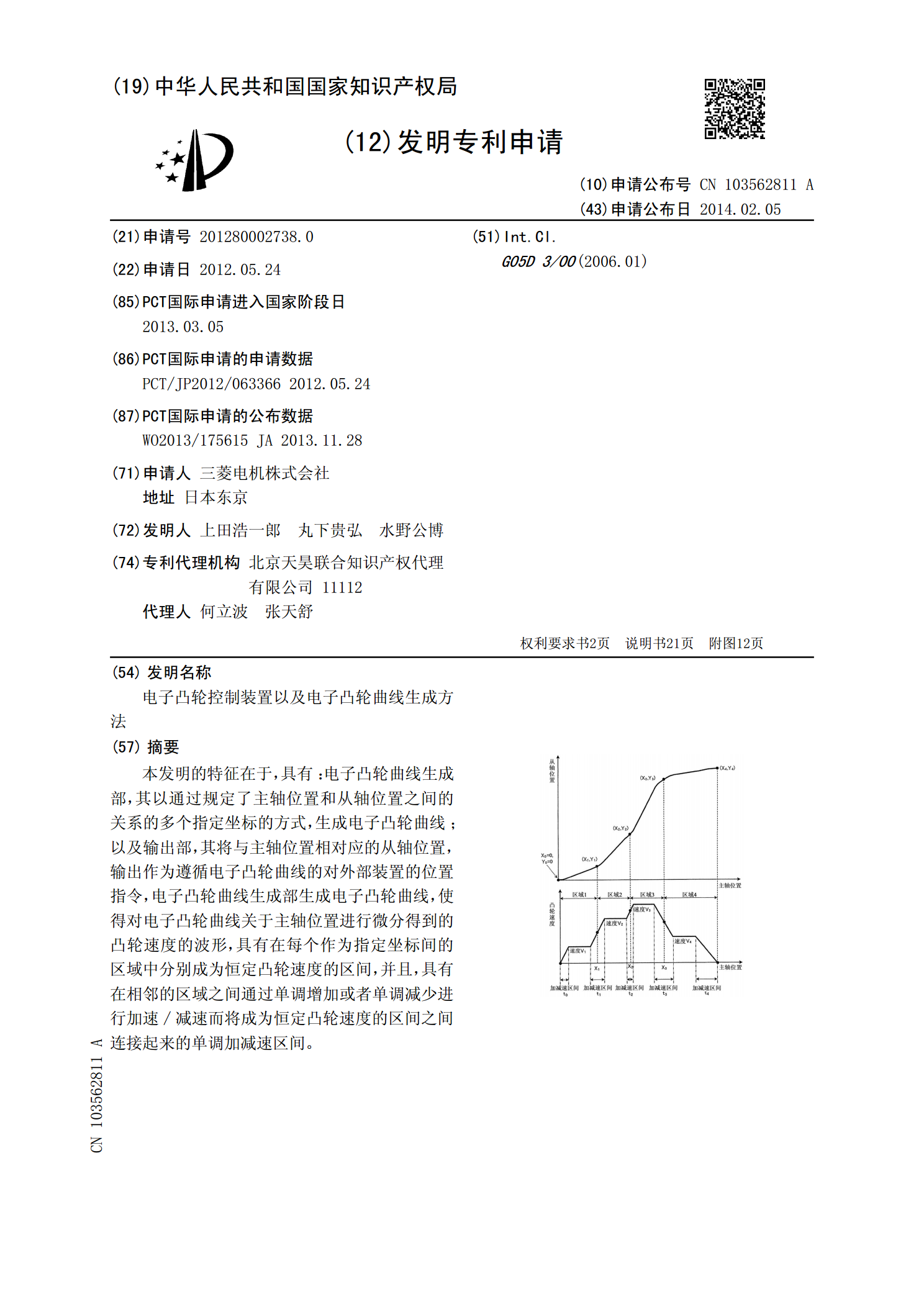
本发明的特征在于,具有:电子凸轮曲线生成部,其以通过规定了主轴位置和从轴位置之间的关系的多个指定坐标的方式,生成电子凸轮曲线;以及输出部,其将与主轴位置相对应的从轴位置,输出作为遵循电子凸轮曲线的对外部装置的位置指令,电子凸轮曲线生成部生成电子凸轮曲线,使得对电子凸轮曲线关于主轴位置进行微分得到的凸轮速度的波形,具有在每个作为指定坐标间的区域中分别成为恒定凸轮速度的区间,并且,具有在相邻的区域之间通过单调增加或者单调减少进行加速/减速而将成为恒定凸轮速度的区间之间连接起来的单调加减速区间。
电子凸轮控制装置及其电子凸轮曲线生成方法.pdf
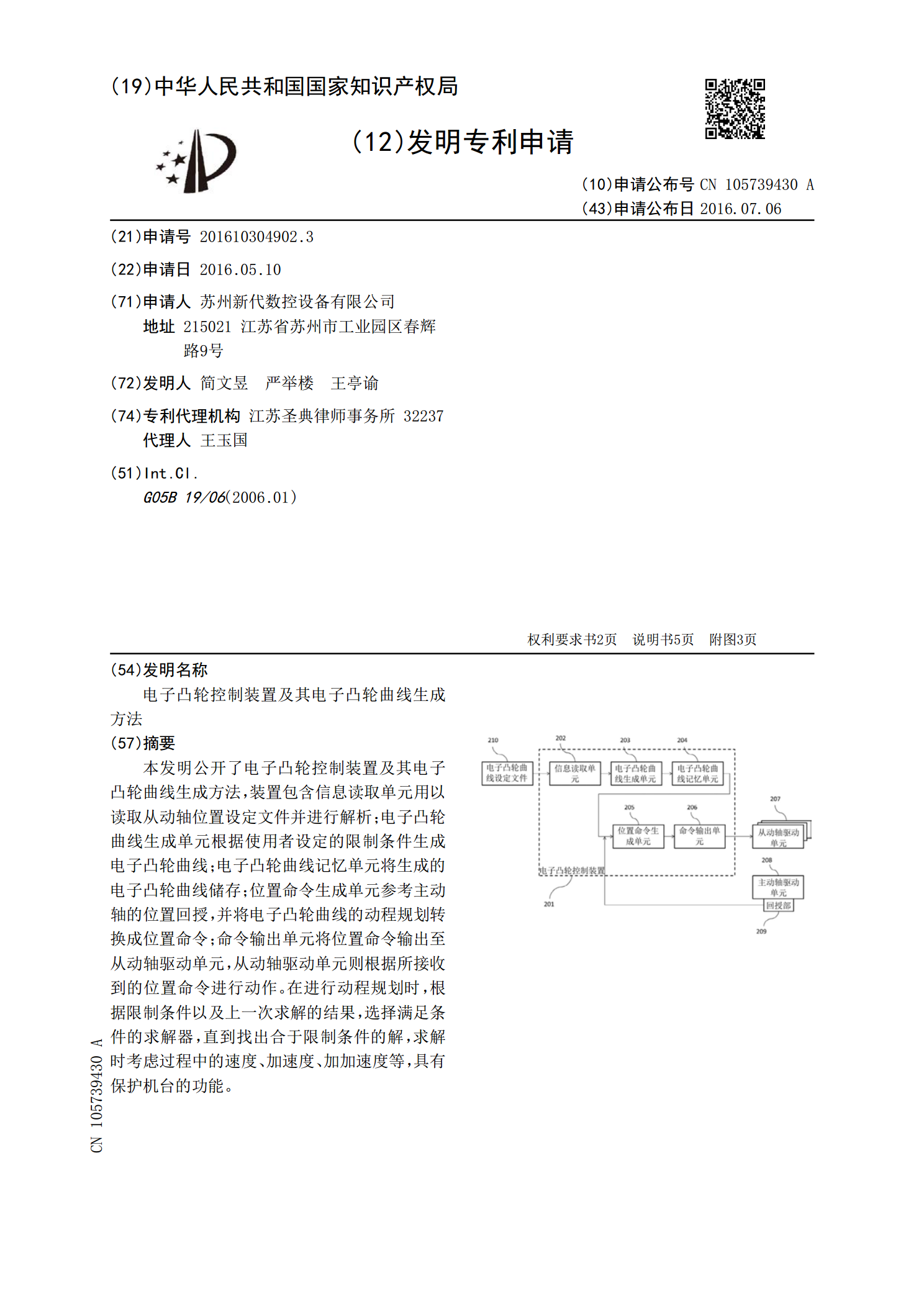
本发明公开了电子凸轮控制装置及其电子凸轮曲线生成方法,装置包含信息读取单元用以读取从动轴位置设定文件并进行解析;电子凸轮曲线生成单元根据使用者设定的限制条件生成电子凸轮曲线;电子凸轮曲线记忆单元将生成的电子凸轮曲线储存;位置命令生成单元参考主动轴的位置回授,并将电子凸轮曲线的动程规划转换成位置命令;命令输出单元将位置命令输出至从动轴驱动单元,从动轴驱动单元则根据所接收到的位置命令进行动作。在进行动程规划时,根据限制条件以及上一次求解的结果,选择满足条件的求解器,直到找出合于限制条件的解,求解时考虑过程中的