
RV减速器摆线轮齿廓的复合修形方法.pdf

朋兴****en


1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
RV减速器摆线轮齿廓的复合修形方法.pdf
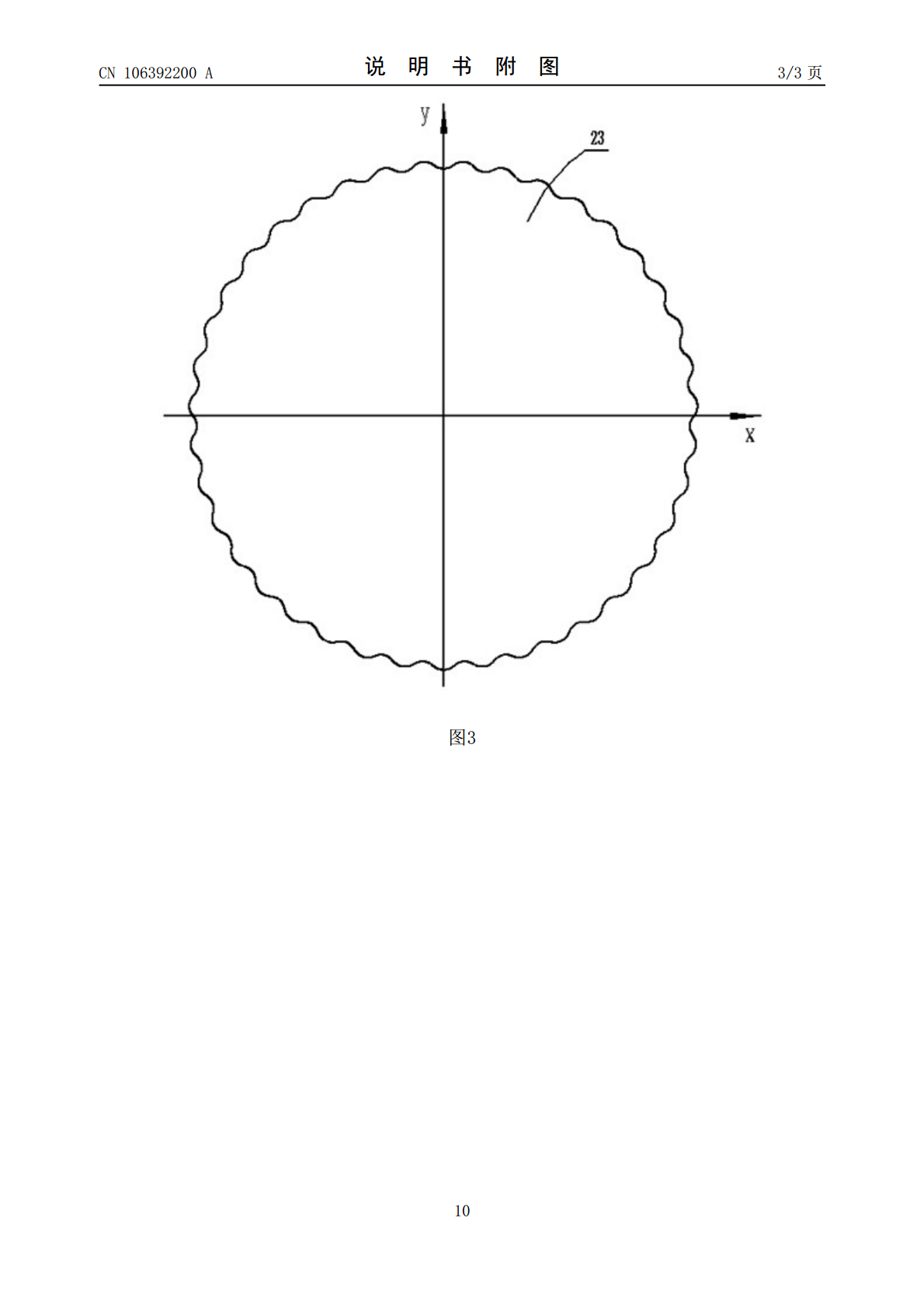
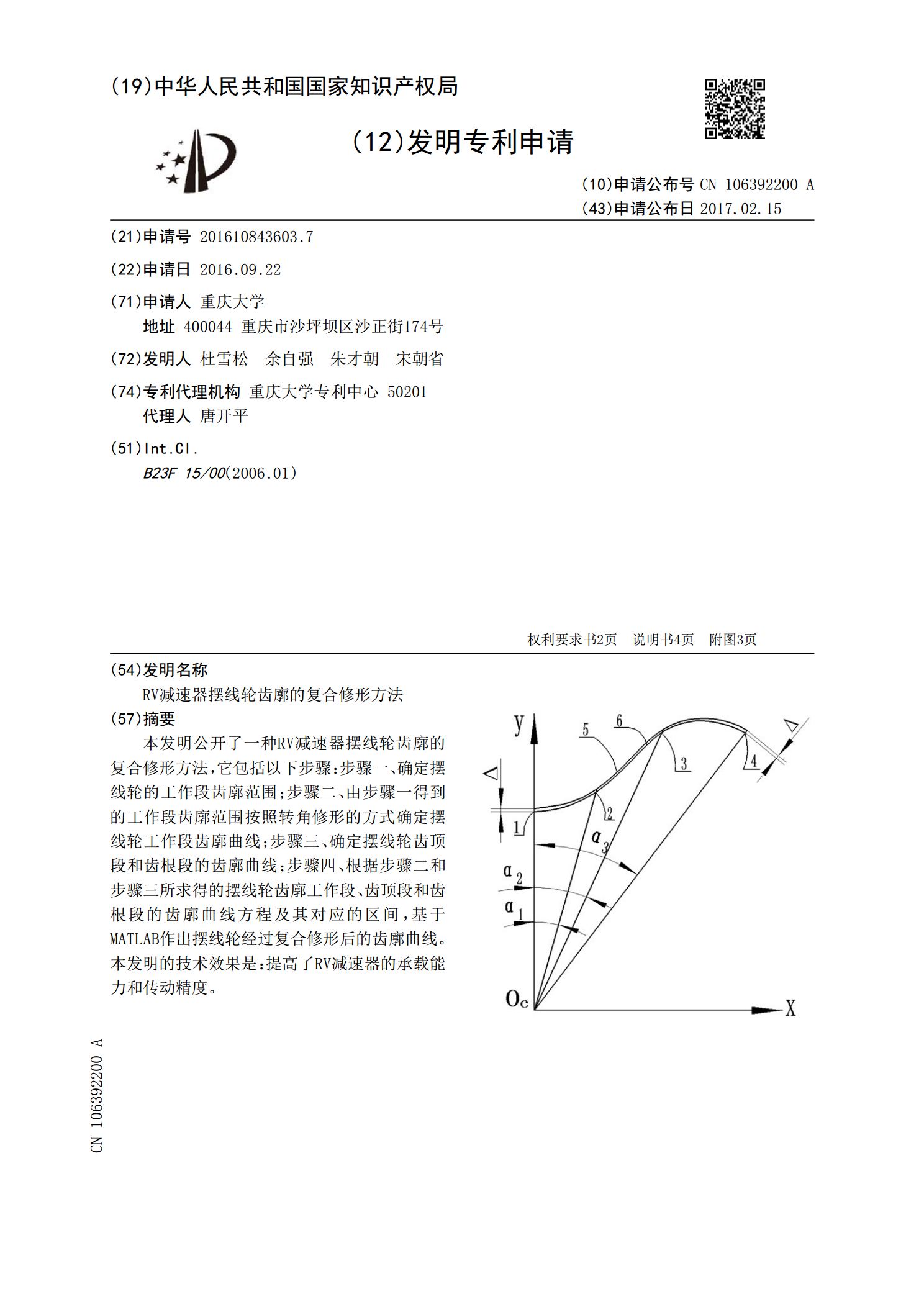
本发明公开了一种RV减速器摆线轮齿廓的复合修形方法,它包括以下步骤:步骤一、确定摆线轮的工作段齿廓范围;步骤二、由步骤一得到的工作段齿廓范围按照转角修形的方式确定摆线轮工作段齿廓曲线;步骤三、确定摆线轮齿顶段和齿根段的齿廓曲线;步骤四、根据步骤二和步骤三所求得的摆线轮齿廓工作段、齿顶段和齿根段的齿廓曲线方程及其对应的区间,基于MATLAB作出摆线轮经过复合修形后的齿廓曲线。本发明的技术效果是:提高了RV减速器的承载能力和传动精度。
摆线轮齿廓修形方法及摆线轮、RV减速器.pdf
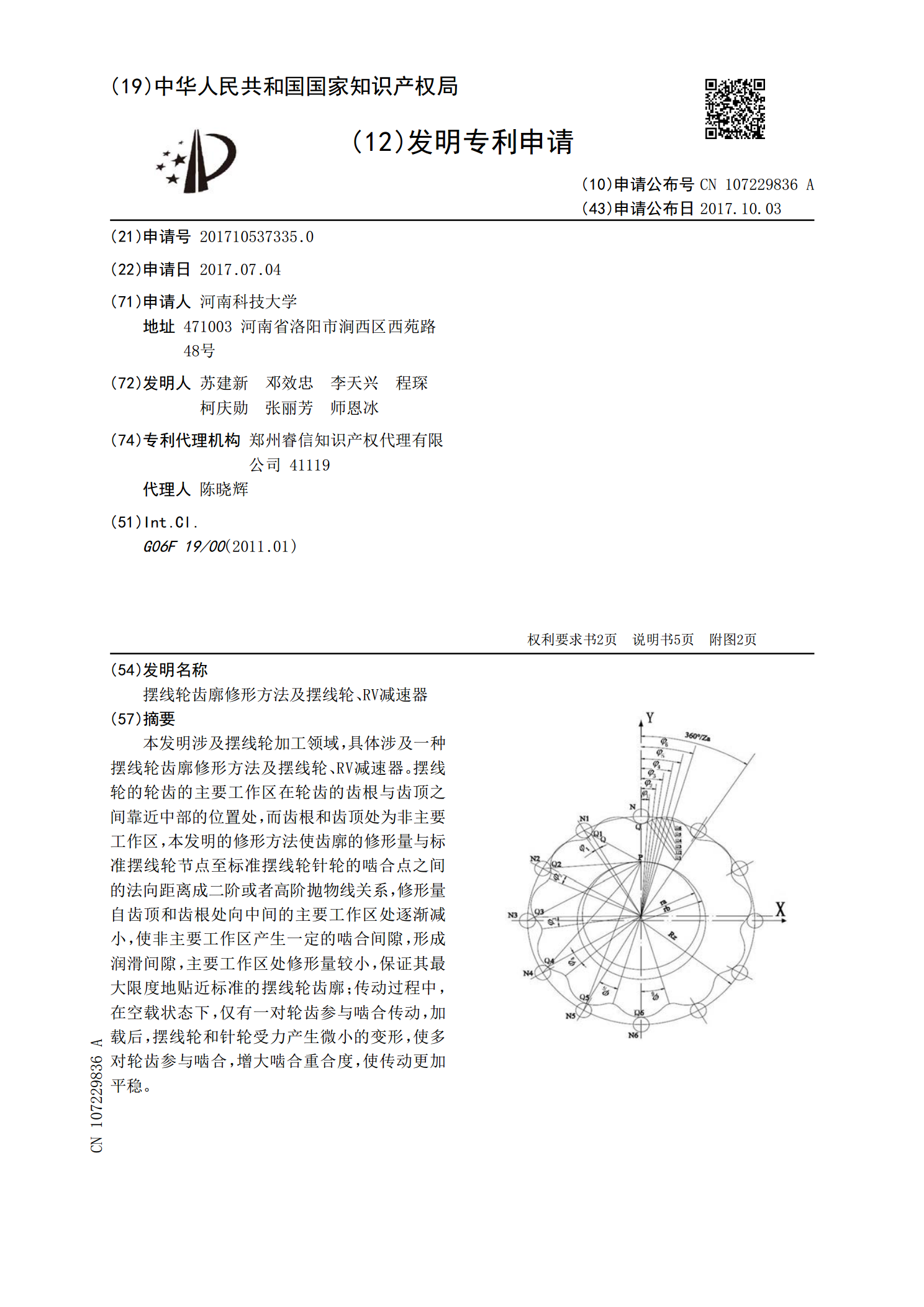
本发明涉及摆线轮加工领域,具体涉及一种摆线轮齿廓修形方法及摆线轮、RV减速器。摆线轮的轮齿的主要工作区在轮齿的齿根与齿顶之间靠近中部的位置处,而齿根和齿顶处为非主要工作区,本发明的修形方法使齿廓的修形量与标准摆线轮节点至标准摆线轮针轮的啮合点之间的法向距离成二阶或者高阶抛物线关系,修形量自齿顶和齿根处向中间的主要工作区处逐渐减小,使非主要工作区产生一定的啮合间隙,形成润滑间隙,主要工作区处修形量较小,保证其最大限度地贴近标准的摆线轮齿廓;传动过程中,在空载状态下,仅有一对轮齿参与啮合传动,加载后,摆线轮和

RV减速器摆线轮齿廓的逆向主动修形方法.docx
RV减速器摆线轮齿廓的逆向主动修形方法标题:RV减速器摆线轮齿廓的逆向主动修形方法摘要:随着工业自动化的发展,减速器作为传动装置的关键部件,在工业生产中扮演着重要的角色。摆线轮减速器作为一种精密的传动装置,其齿廓的精确性直接影响减速器的运行性能和寿命。因此,研究摆线轮齿廓的修形方法对于提高减速器的可靠性和传动效率具有重要意义。本文基于逆向主动修形方法,对RV减速器摆线轮齿廓进行了深入研究,并提出了一种有效的修形方法。一、引言摆线轮减速器是一种主动宽传动比齿轮传动装置,具有传动效率高、噪声小、扭矩密度大等优

一种RV减速器摆线轮齿廓修形方法.docx
一种RV减速器摆线轮齿廓修形方法RV减速器是一种广泛应用于机械传动领域的重要设备,其特点是体积小、扭矩大、精度高,并且具有防反倒和减震的作用。摆线轮是RV减速器的主要传动部件,其负责实现齿轮的传动功能。由于制造或使用过程中的误差和磨损等原因,摆线轮的齿轮廓往往不够准确,需要进行修形。本文对RV减速器摆线轮齿廓修形方法进行探讨。首先,齿廓修形的前提是需要做出摆线轮的初始三维模型。这个模型可以通过CAD软件进行绘制,具体的步骤包括三维建模、细分网格生成、对称轴的设置等。这个初始模型是进行齿廓修形的基础。在实际
一种摆线轮齿廓修形方法及摆线轮、RV减速器.pdf
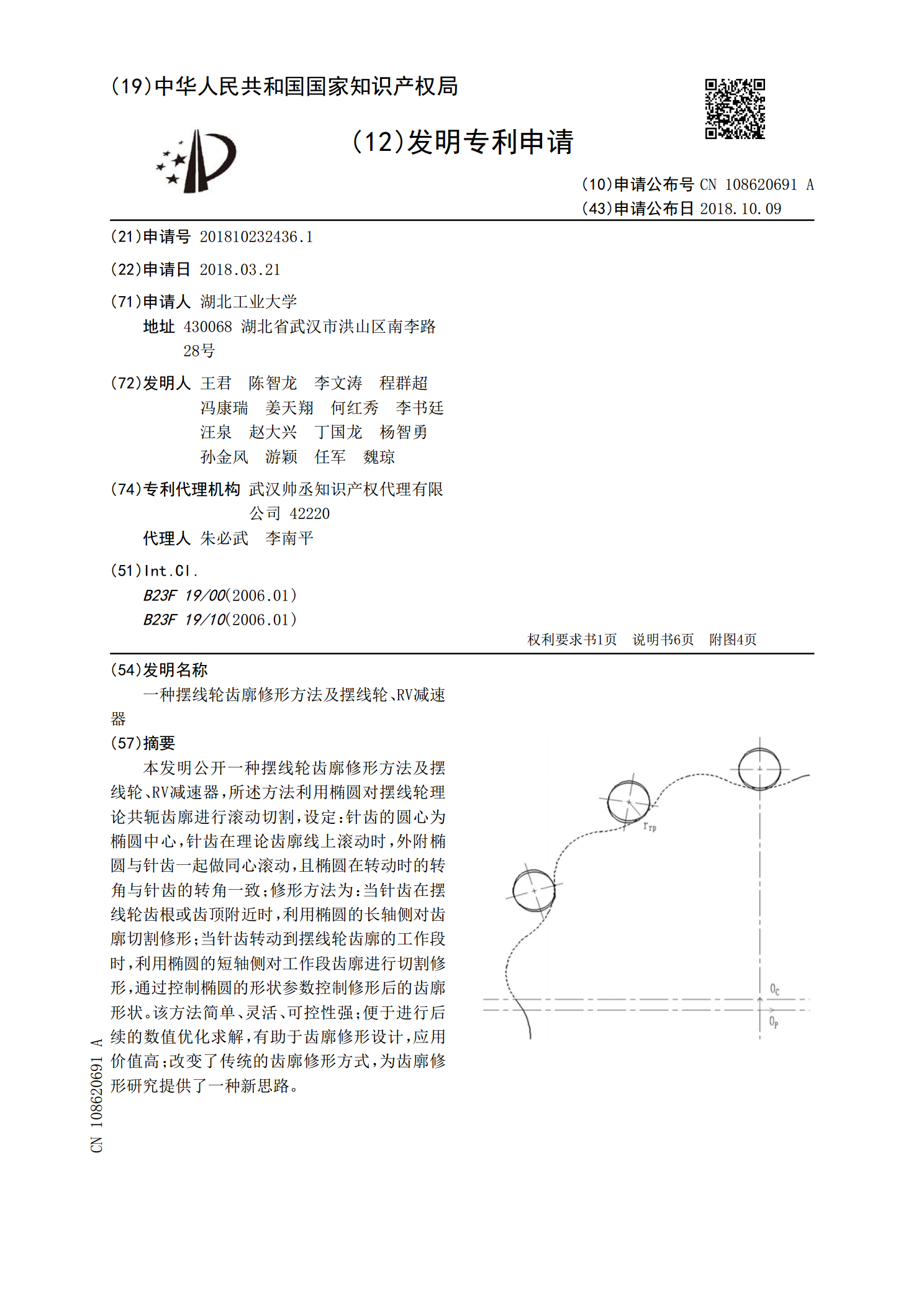
本发明公开一种摆线轮齿廓修形方法及摆线轮、RV减速器,所述方法利用椭圆对摆线轮理论共轭齿廓进行滚动切割,设定:针齿的圆心为椭圆中心,针齿在理论齿廓线上滚动时,外附椭圆与针齿一起做同心滚动,且椭圆在转动时的转角与针齿的转角一致;修形方法为:当针齿在摆线轮齿根或齿顶附近时,利用椭圆的长轴侧对齿廓切割修形;当针齿转动到摆线轮齿廓的工作段时,利用椭圆的短轴侧对工作段齿廓进行切割修形,通过控制椭圆的形状参数控制修形后的齿廓形状。该方法简单、灵活、可控性强;便于进行后续的数值优化求解,有助于齿廓修形设计,应用价值高;