
一种自适应管径的管道机器人.pdf

康平****ng

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自适应管径的管道机器人.pdf
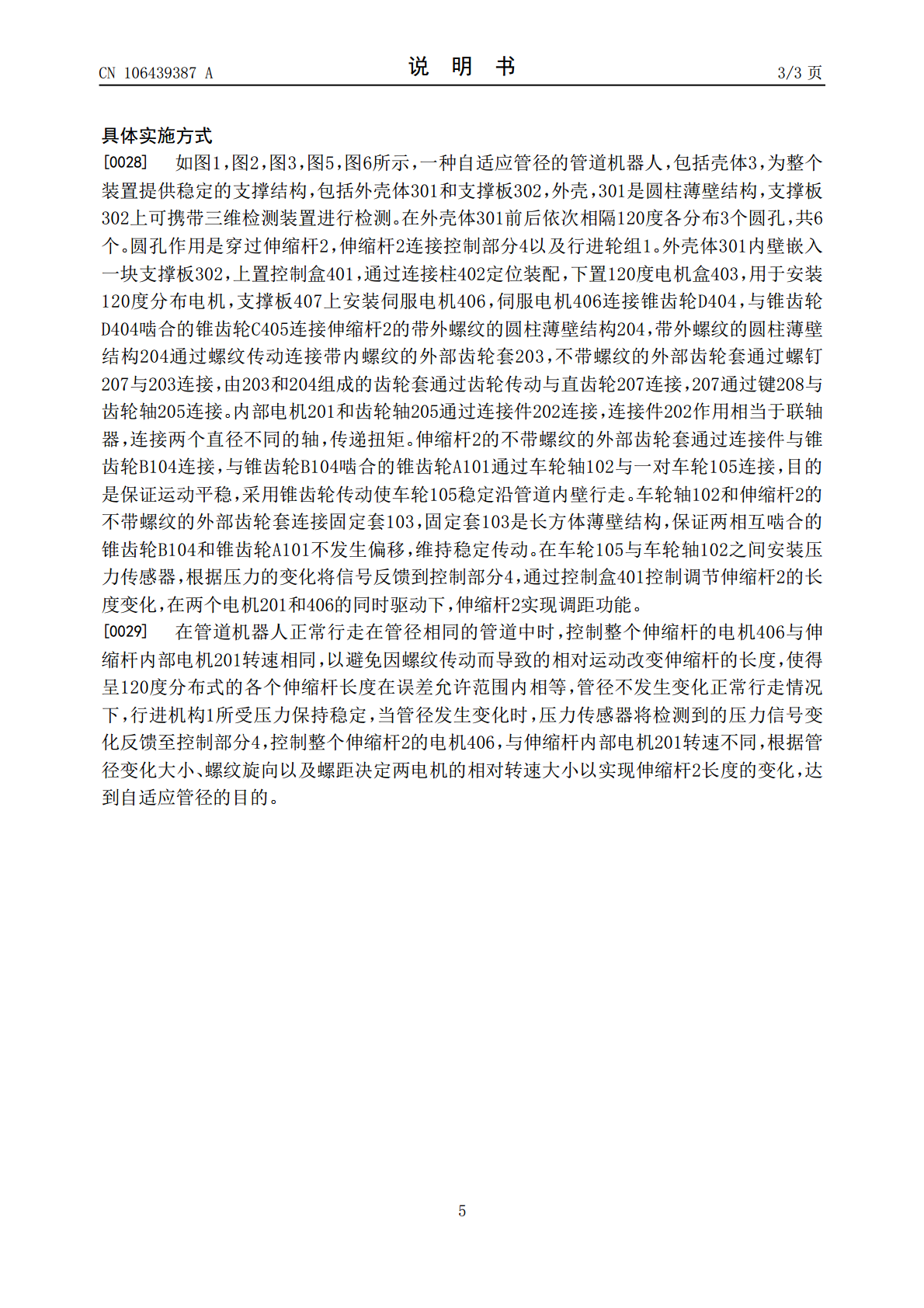
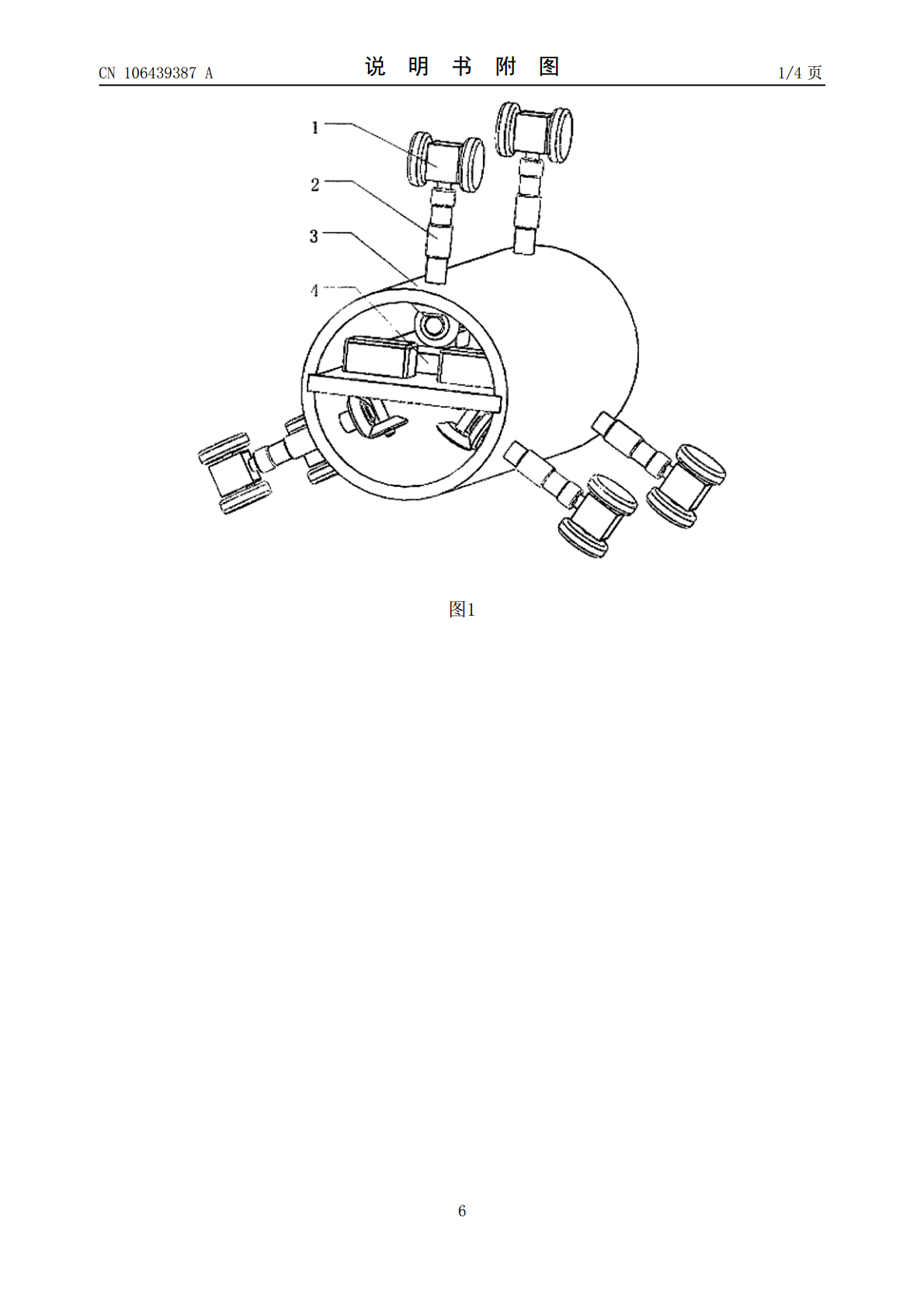
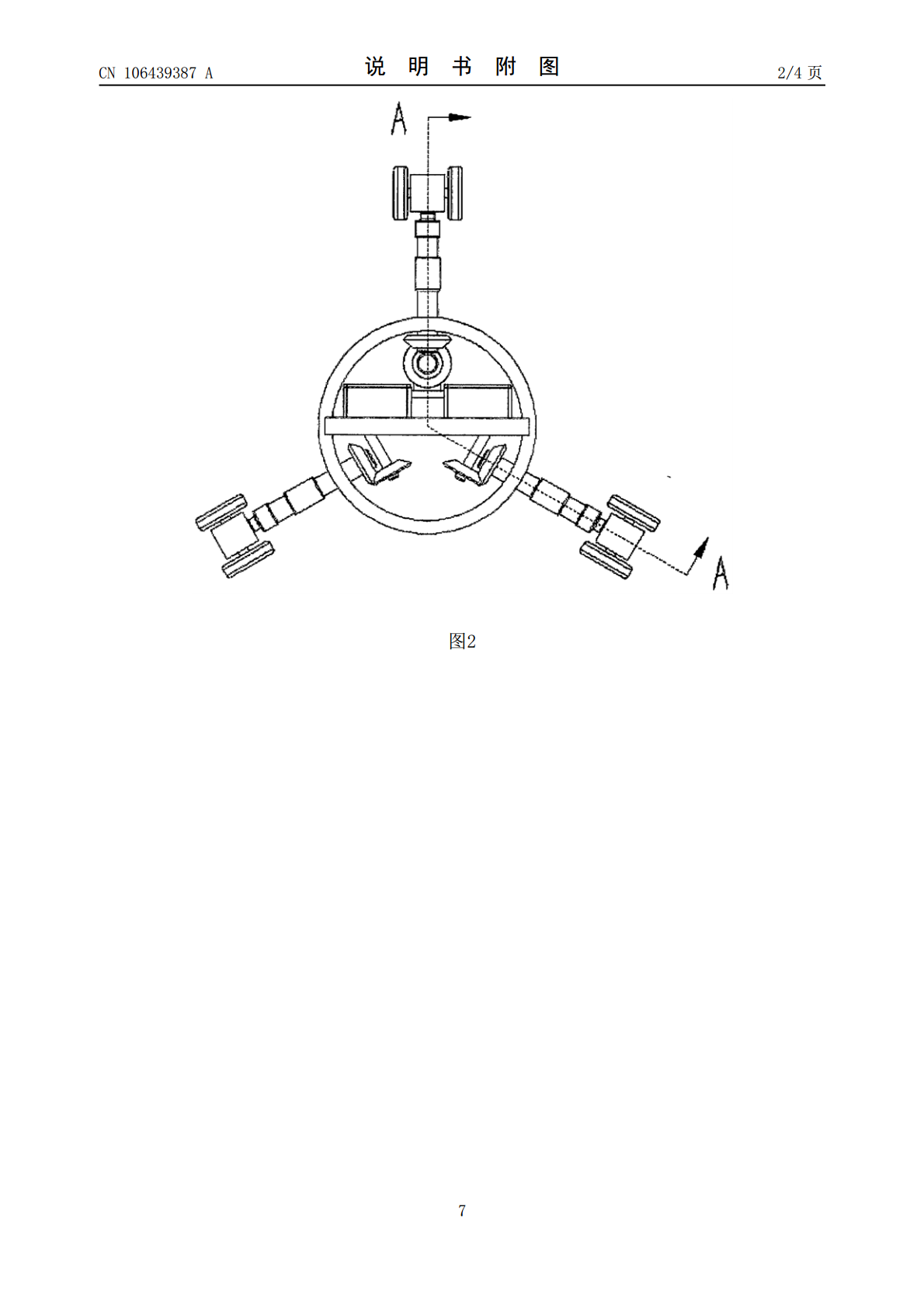
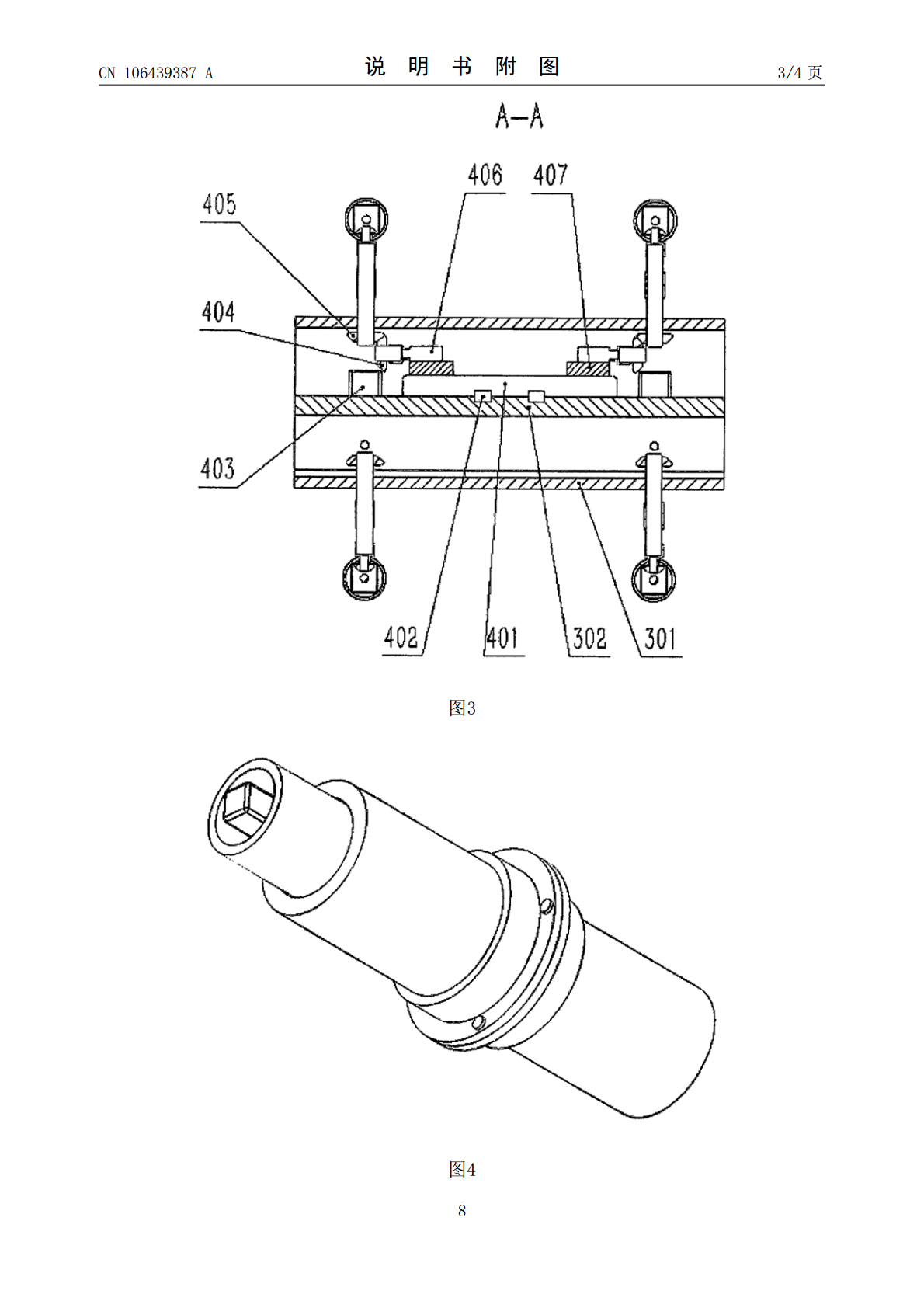
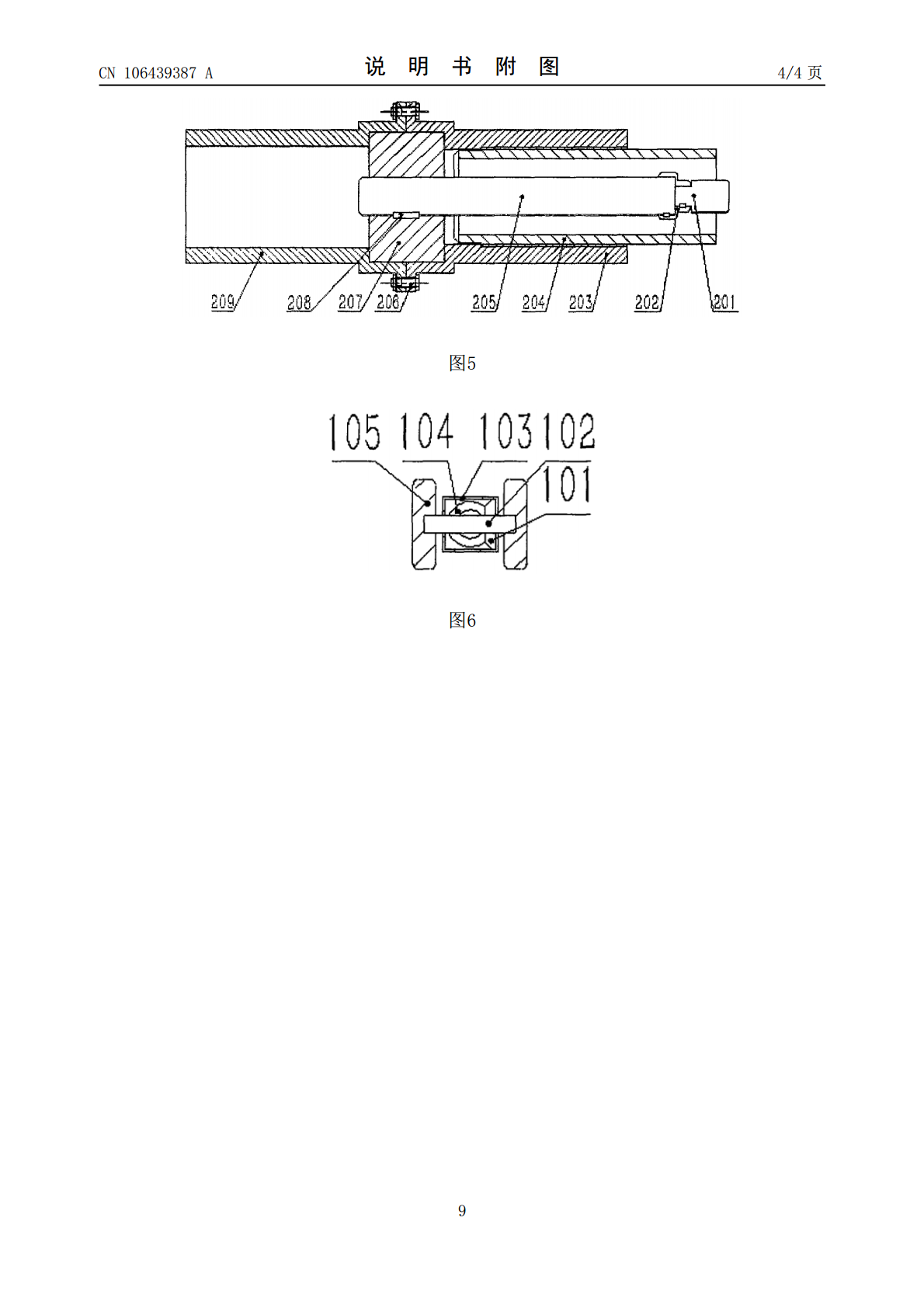
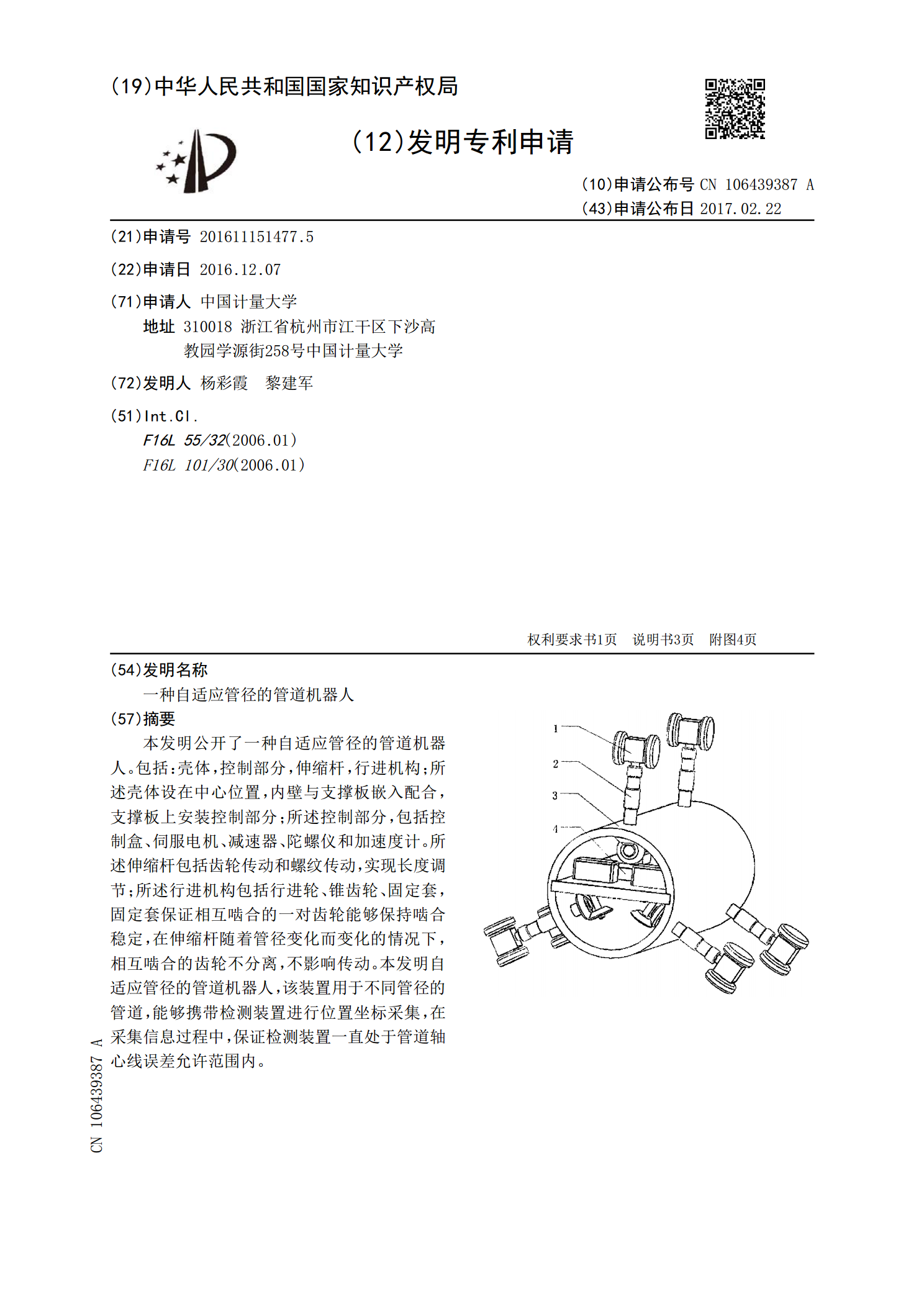
本发明公开了一种自适应管径的管道机器人。包括:壳体,控制部分,伸缩杆,行进机构;所述壳体设在中心位置,内壁与支撑板嵌入配合,支撑板上安装控制部分;所述控制部分,包括控制盒、伺服电机、减速器、陀螺仪和加速度计。所述伸缩杆包括齿轮传动和螺纹传动,实现长度调节;所述行进机构包括行进轮、锥齿轮、固定套,固定套保证相互啮合的一对齿轮能够保持啮合稳定,在伸缩杆随着管径变化而变化的情况下,相互啮合的齿轮不分离,不影响传动。本发明自适应管径的管道机器人,该装置用于不同管径的管道,能够携带检测装置进行位置坐标采集,在采集信
一种自适应管径变化的管道机器人.pdf
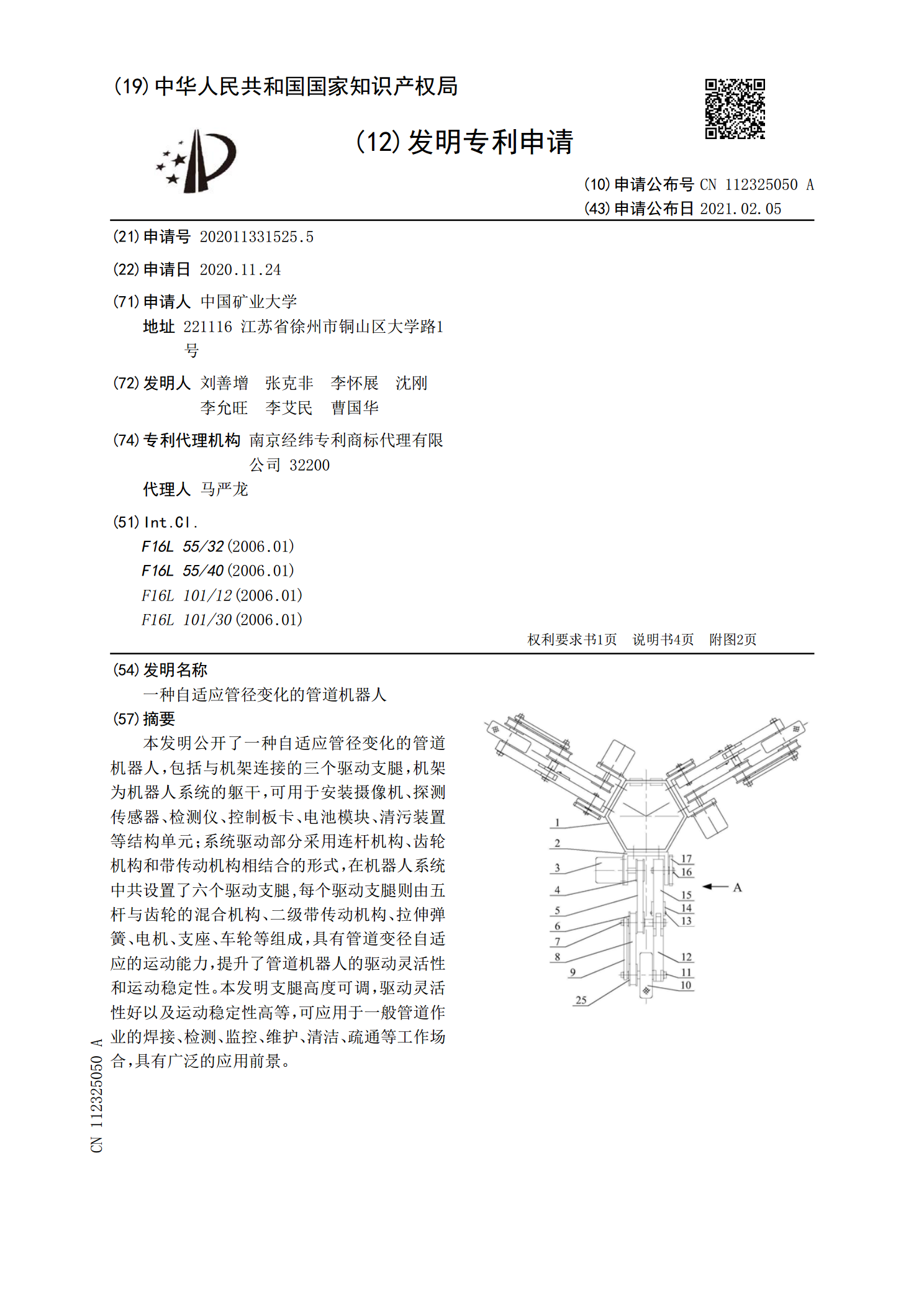
本发明公开了一种自适应管径变化的管道机器人,包括与机架连接的三个驱动支腿,机架为机器人系统的躯干,可用于安装摄像机、探测传感器、检测仪、控制板卡、电池模块、清污装置等结构单元;系统驱动部分采用连杆机构、齿轮机构和带传动机构相结合的形式,在机器人系统中共设置了六个驱动支腿,每个驱动支腿则由五杆与齿轮的混合机构、二级带传动机构、拉伸弹簧、电机、支座、车轮等组成,具有管道变径自适应的运动能力,提升了管道机器人的驱动灵活性和运动稳定性。本发明支腿高度可调,驱动灵活性好以及运动稳定性高等,可应用于一般管道作业的焊接
自适应管径管道爬行机器人.pdf
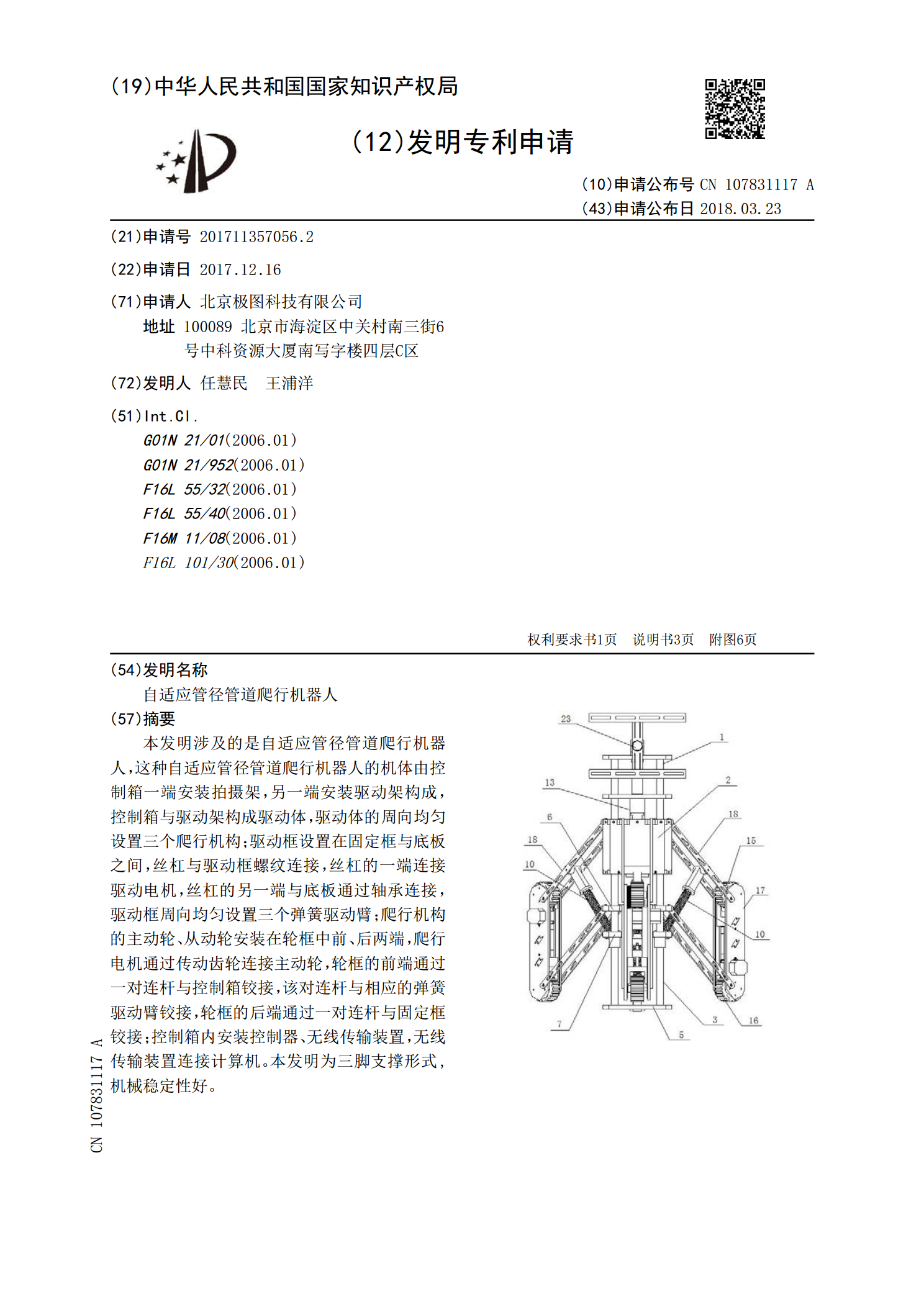
本发明涉及的是自适应管径管道爬行机器人,这种自适应管径管道爬行机器人的机体由控制箱一端安装拍摄架,另一端安装驱动架构成,控制箱与驱动架构成驱动体,驱动体的周向均匀设置三个爬行机构;驱动框设置在固定框与底板之间,丝杠与驱动框螺纹连接,丝杠的一端连接驱动电机,丝杠的另一端与底板通过轴承连接,驱动框周向均匀设置三个弹簧驱动臂;爬行机构的主动轮、从动轮安装在轮框中前、后两端,爬行电机通过传动齿轮连接主动轮,轮框的前端通过一对连杆与控制箱铰接,该对连杆与相应的弹簧驱动臂铰接,轮框的后端通过一对连杆与固定框铰接;控制
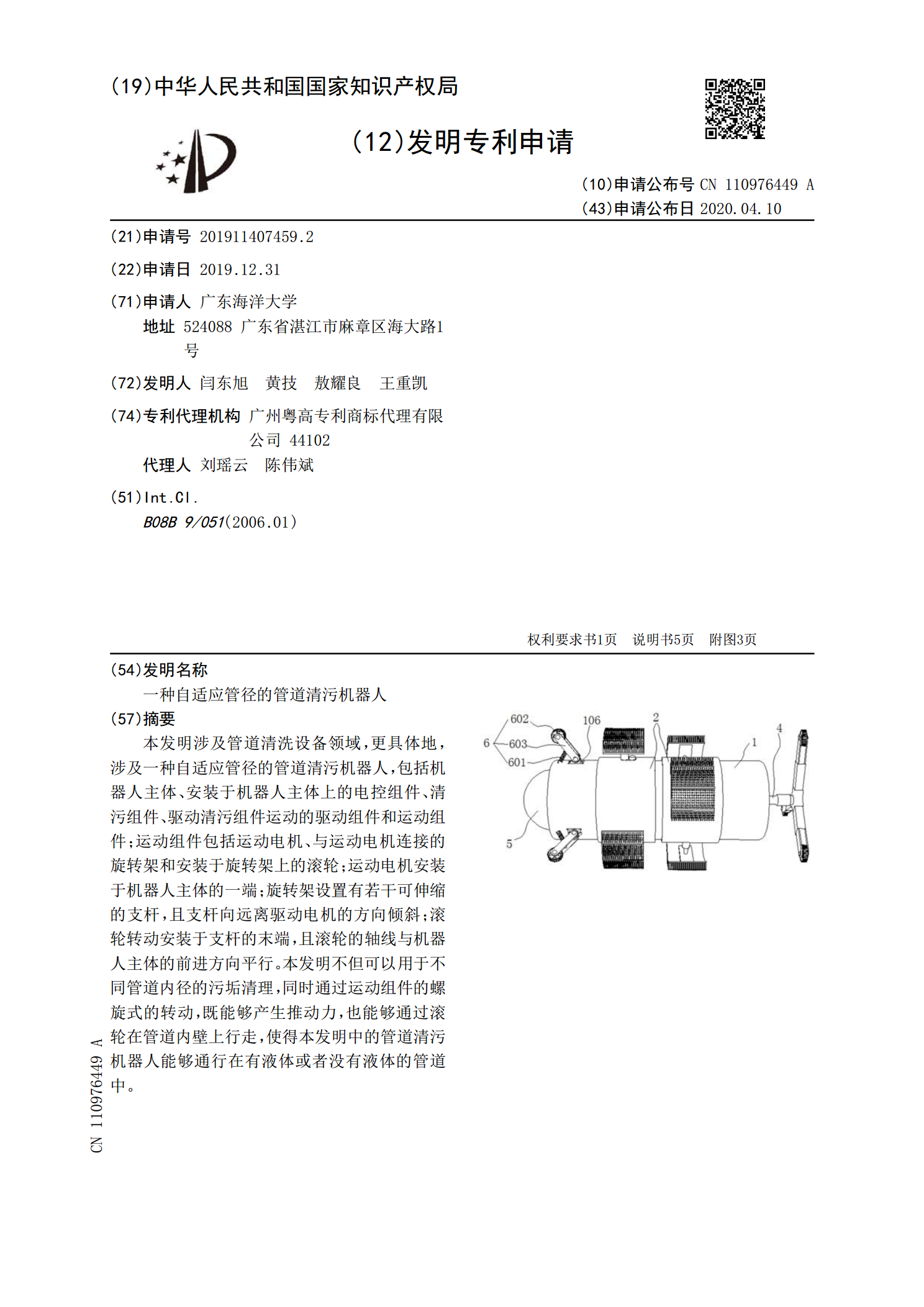
一种自适应管径的管道清污机器人.pdf
本发明涉及管道清洗设备领域,更具体地,涉及一种自适应管径的管道清污机器人,包括机器人主体、安装于机器人主体上的电控组件、清污组件、驱动清污组件运动的驱动组件和运动组件;运动组件包括运动电机、与运动电机连接的旋转架和安装于旋转架上的滚轮;运动电机安装于机器人主体的一端;旋转架设置有若干可伸缩的支杆,且支杆向远离驱动电机的方向倾斜;滚轮转动安装于支杆的末端,且滚轮的轴线与机器人主体的前进方向平行。本发明不但可以用于不同管道内径的污垢清理,同时通过运动组件的螺旋式的转动,既能够产生推动力,也能够通过滚轮在管道内
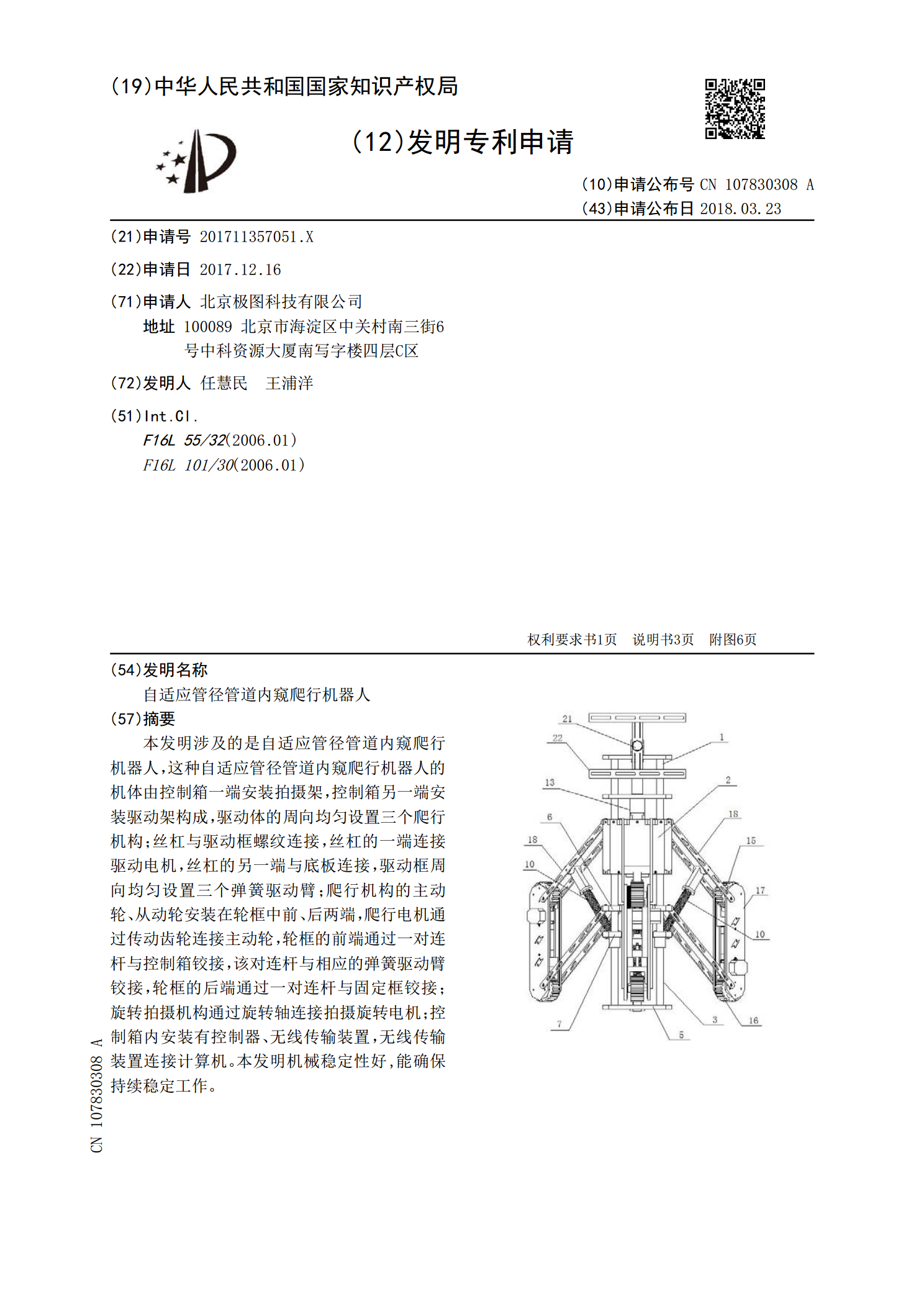
自适应管径管道内窥爬行机器人.pdf
本发明涉及的是自适应管径管道内窥爬行机器人,这种自适应管径管道内窥爬行机器人的机体由控制箱一端安装拍摄架,控制箱另一端安装驱动架构成,驱动体的周向均匀设置三个爬行机构;丝杠与驱动框螺纹连接,丝杠的一端连接驱动电机,丝杠的另一端与底板连接,驱动框周向均匀设置三个弹簧驱动臂;爬行机构的主动轮、从动轮安装在轮框中前、后两端,爬行电机通过传动齿轮连接主动轮,轮框的前端通过一对连杆与控制箱铰接,该对连杆与相应的弹簧驱动臂铰接,轮框的后端通过一对连杆与固定框铰接;旋转拍摄机构通过旋转轴连接拍摄旋转电机;控制箱内安装有