
一种智能攀爬摘果机器人.pdf

明钰****甜甜


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能攀爬摘果机器人.pdf
本发明公开了一种智能攀爬摘果机器人,包括八个履带轮、四个轮架、四个第一步进电机、底板、下固定爪、第二步进电机、转动板、第三步进电机、‑丝杠支座、丝杠、滑动板、第四步进电机、下转动架、第一电缸、上转动架、第二电缸、上固定爪、第五步进电机、袋子支架、固定柱、第五电缸、固定板、第六电缸、液压剪,本发明具有以下优点:本发明结构紧凑、体积小巧、自动化程度高、适合各种环境,能够安全高效地进行树木摘果工作,大大减轻了工人的劳动强度,提高了工作效率。
一种智能电杆攀爬机器人.pdf
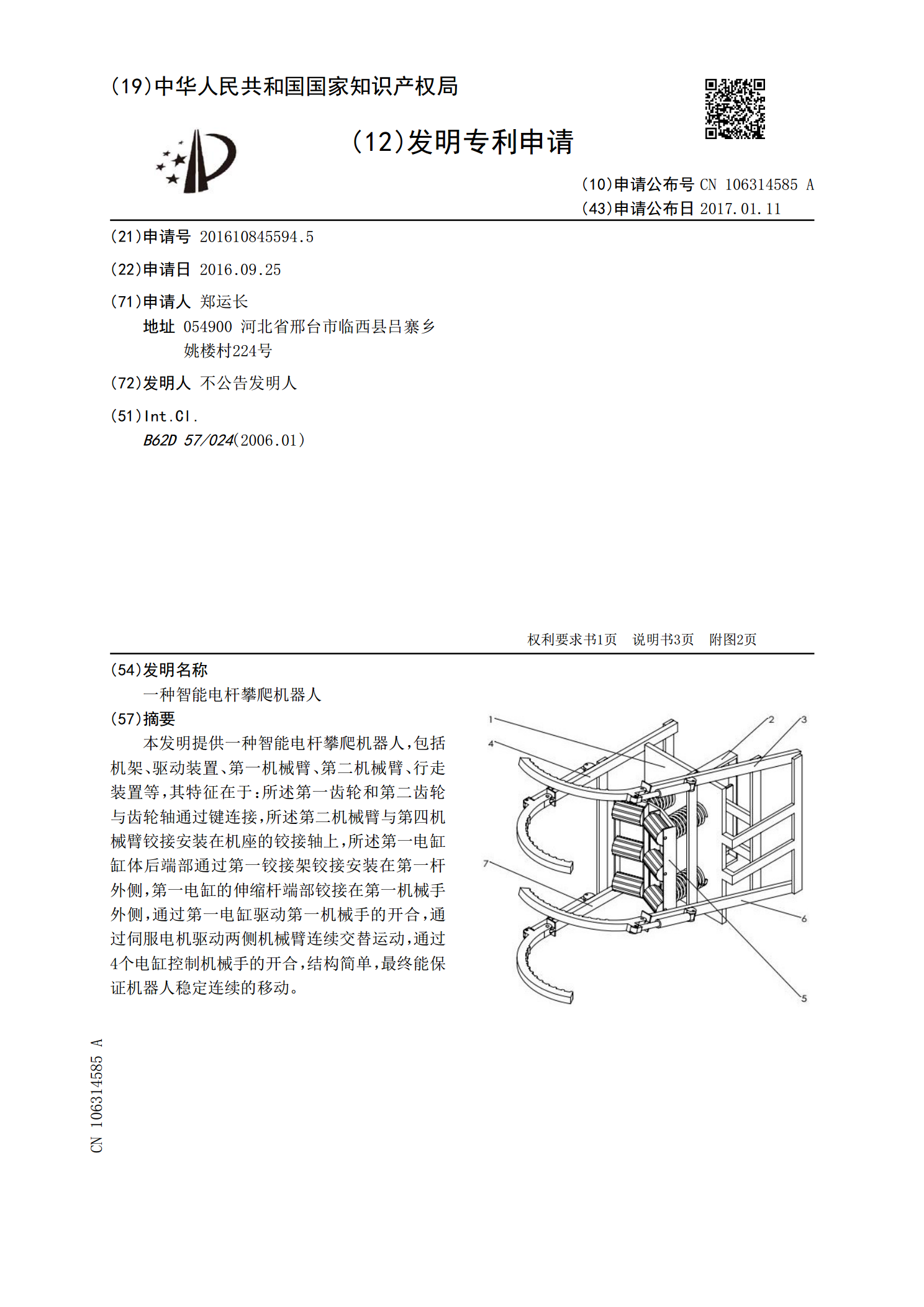
本发明提供一种智能电杆攀爬机器人,包括机架、驱动装置、第一机械臂、第二机械臂、行走装置等,其特征在于:所述第一齿轮和第二齿轮与齿轮轴通过键连接,所述第二机械臂与第四机械臂铰接安装在机座的铰接轴上,所述第一电缸缸体后端部通过第一铰接架铰接安装在第一杆外侧,第一电缸的伸缩杆端部铰接在第一机械手外侧,通过第一电缸驱动第一机械手的开合,通过伺服电机驱动两侧机械臂连续交替运动,通过4个电缸控制机械手的开合,结构简单,最终能保证机器人稳定连续的移动。
一种智能树木攀爬修枝机器人.pdf
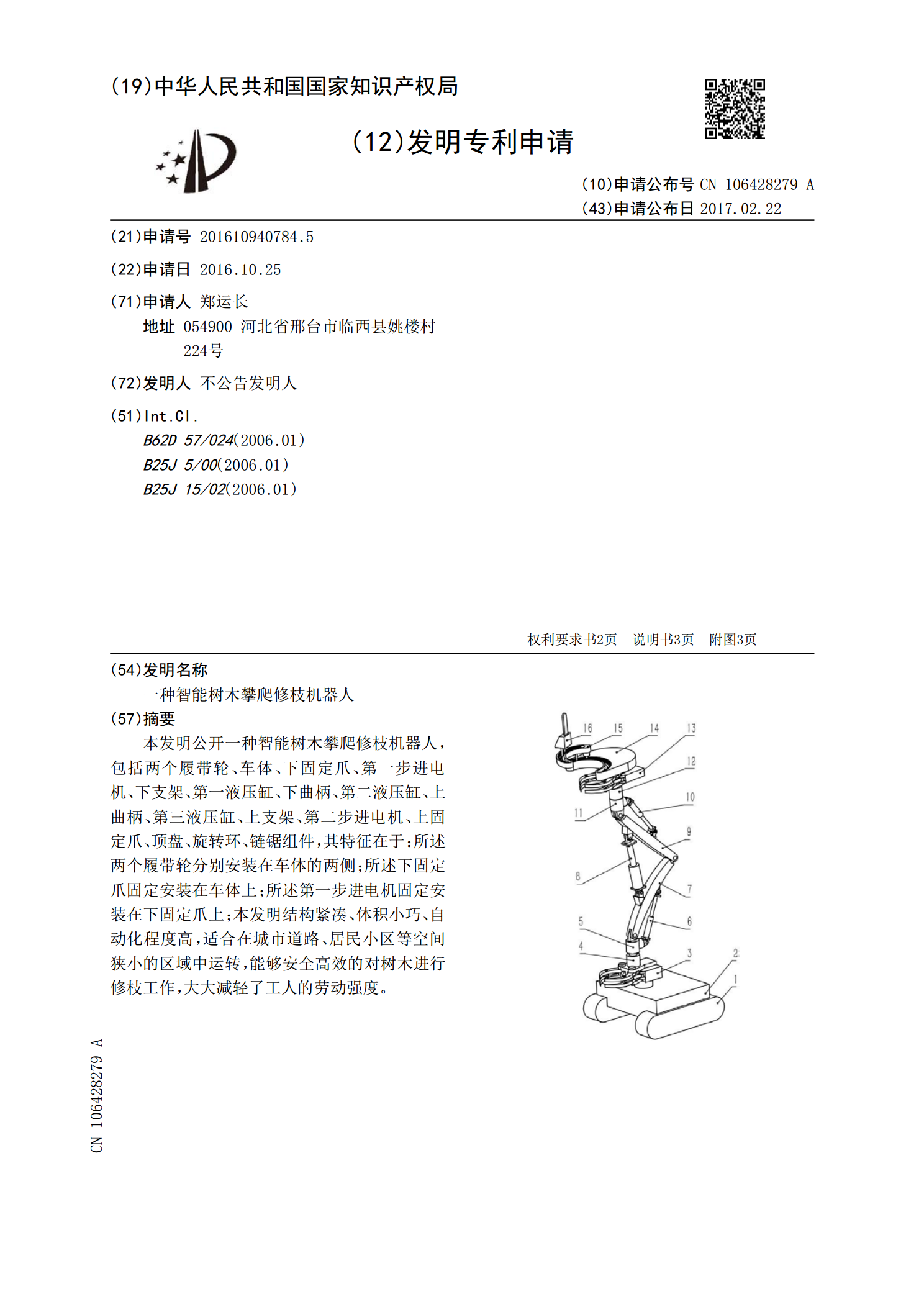
本发明公开一种智能树木攀爬修枝机器人,包括两个履带轮、车体、下固定爪、第一步进电机、下支架、第一液压缸、下曲柄、第二液压缸、上曲柄、第三液压缸、上支架、第二步进电机、上固定爪、顶盘、旋转环、链锯组件,其特征在于:所述两个履带轮分别安装在车体的两侧;所述下固定爪固定安装在车体上;所述第一步进电机固定安装在下固定爪上;本发明结构紧凑、体积小巧、自动化程度高,适合在城市道路、居民小区等空间狭小的区域中运转,能够安全高效的对树木进行修枝工作,大大减轻了工人的劳动强度。

一种高效率智能攀爬清洁机器人.pdf
本实用新型公开了一种高效率智能攀爬清洁机器人,包括旋转机构、升降机构、主体机构和行走履带,所述主体机构的两侧均安装有行走履带,且主体机构顶端安装有升降机构,所述升降机构的顶端安装有旋转机构,所述主体机构内部的两端均安装有第二吸尘装置,且主体机构内部的中间位置处安装有第二电机,所述转盘的顶端安装有第一机械臂,所述第二机械臂的另一端安装有第一吸尘装置,且第二机械臂与第一机械臂之间安装有第二可伸缩液压杆。本实用新型通过安装有行走履带,使得装置可以进行自动化移动,不再需要进行人工搬运,使得装置使用极为便捷,且节省
一种智能化攀爬式喷漆机器人.pdf
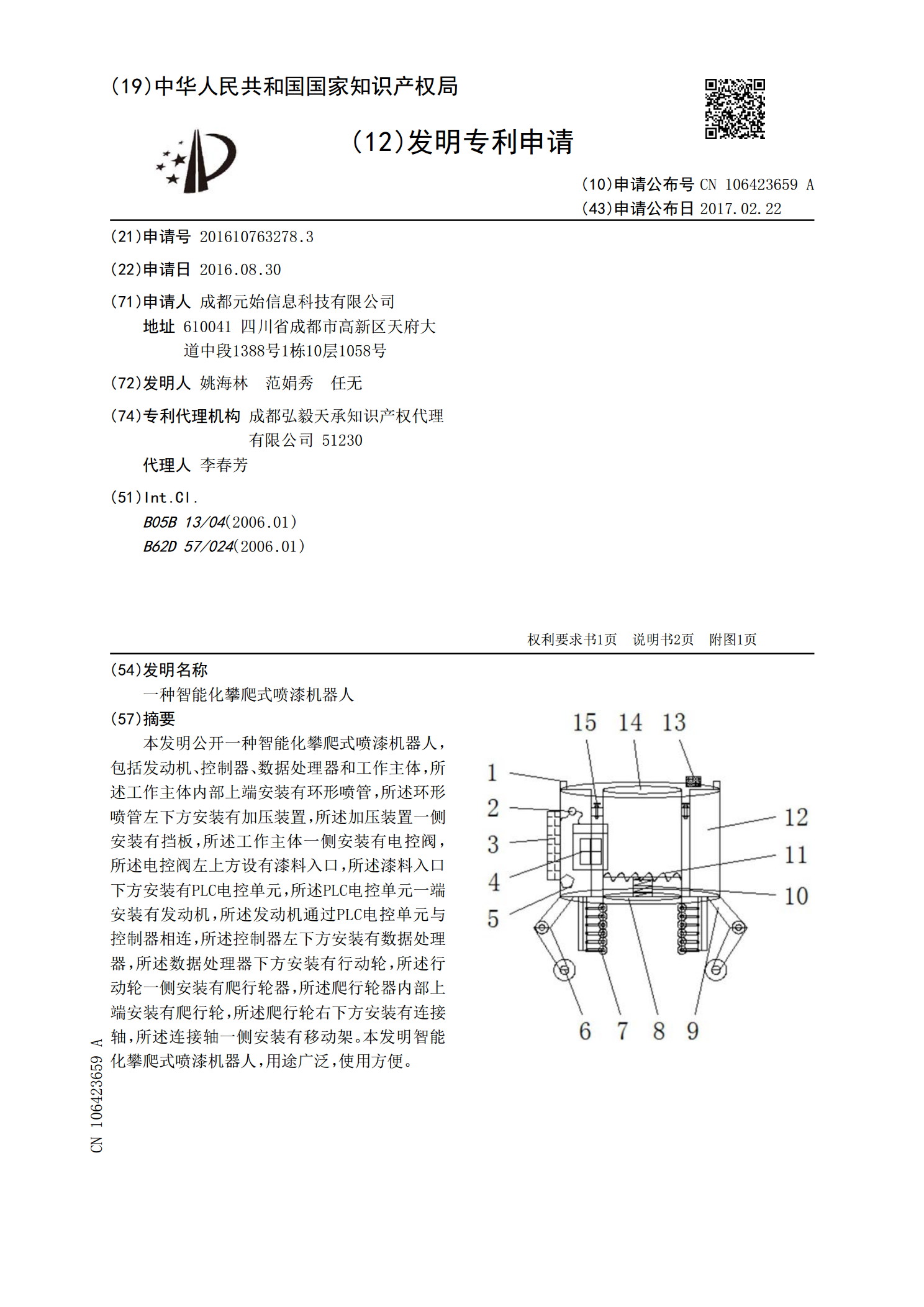
本发明公开一种智能化攀爬式喷漆机器人,包括发动机、控制器、数据处理器和工作主体,所述工作主体内部上端安装有环形喷管,所述环形喷管左下方安装有加压装置,所述加压装置一侧安装有挡板,所述工作主体一侧安装有电控阀,所述电控阀左上方设有漆料入口,所述漆料入口下方安装有PLC电控单元,所述PLC电控单元一端安装有发动机,所述发动机通过PLC电控单元与控制器相连,所述控制器左下方安装有数据处理器,所述数据处理器下方安装有行动轮,所述行动轮一侧安装有爬行轮器,所述爬行轮器内部上端安装有爬行轮,所述爬行轮右下方安装有连接