
一种智能电杆攀爬机器人.pdf

努力****妙风


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能电杆攀爬机器人.pdf
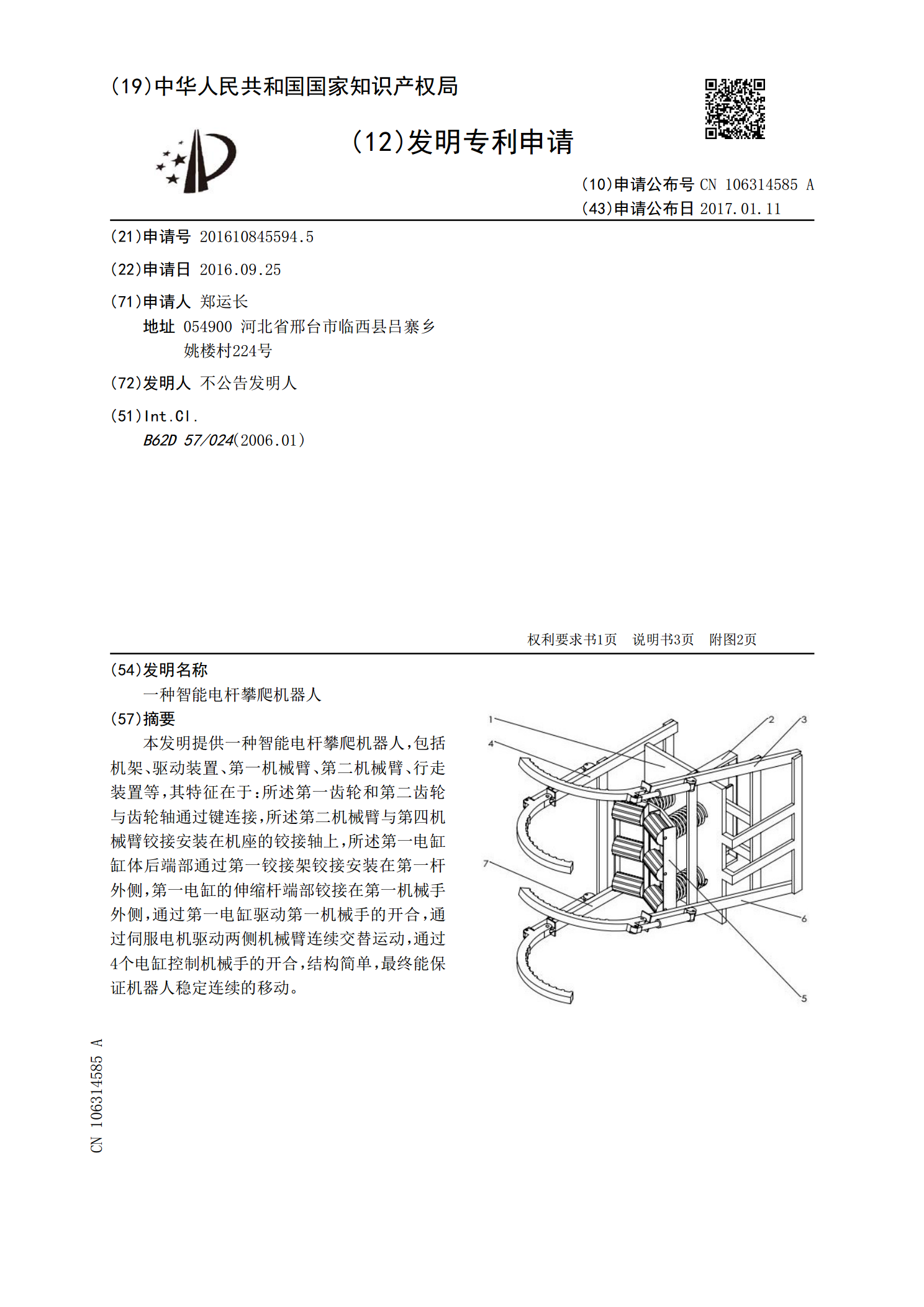
本发明提供一种智能电杆攀爬机器人,包括机架、驱动装置、第一机械臂、第二机械臂、行走装置等,其特征在于:所述第一齿轮和第二齿轮与齿轮轴通过键连接,所述第二机械臂与第四机械臂铰接安装在机座的铰接轴上,所述第一电缸缸体后端部通过第一铰接架铰接安装在第一杆外侧,第一电缸的伸缩杆端部铰接在第一机械手外侧,通过第一电缸驱动第一机械手的开合,通过伺服电机驱动两侧机械臂连续交替运动,通过4个电缸控制机械手的开合,结构简单,最终能保证机器人稳定连续的移动。
一种电杆防攀爬装置.pdf
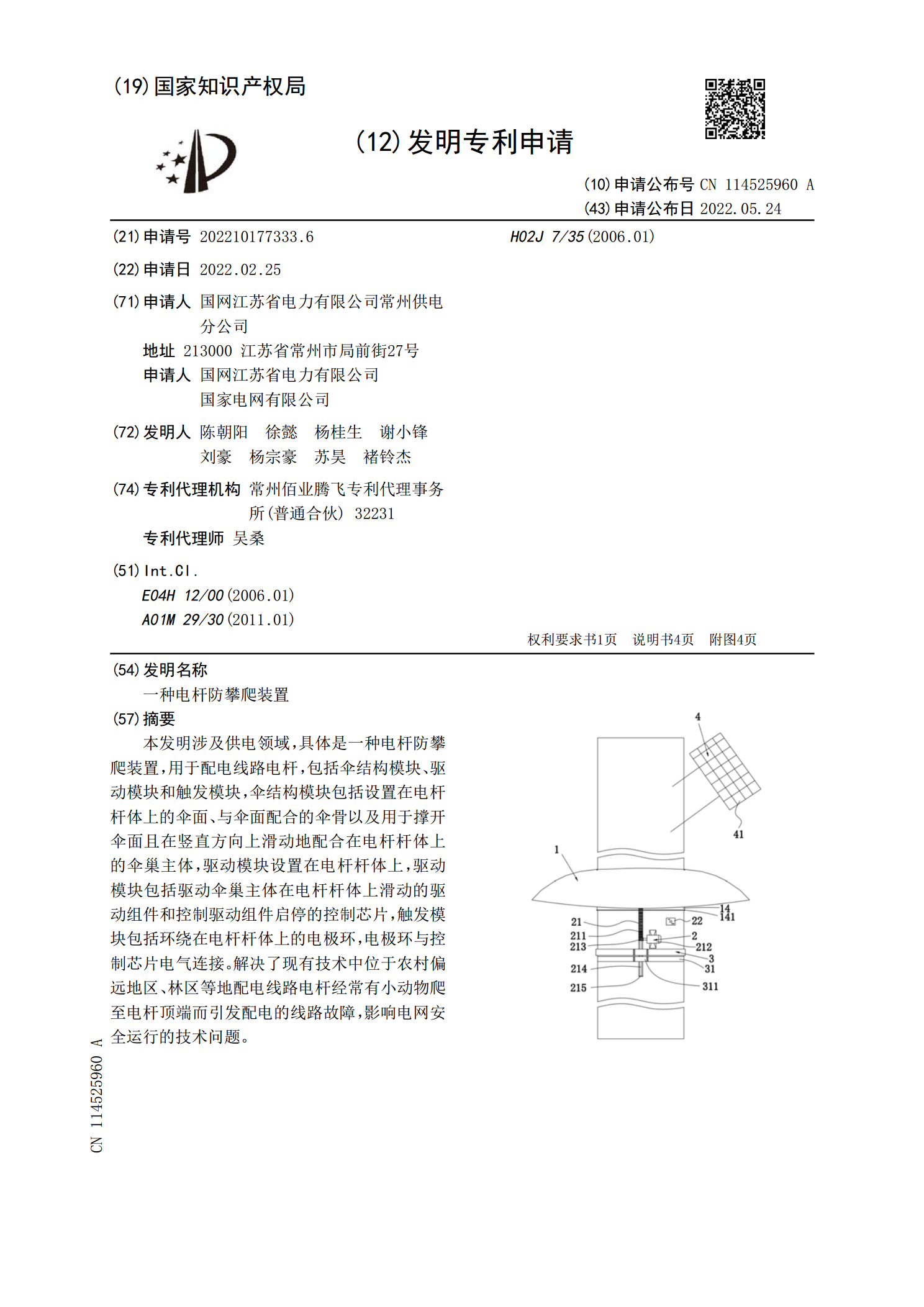
本发明涉及供电领域,具体是一种电杆防攀爬装置,用于配电线路电杆,包括伞结构模块、驱动模块和触发模块,伞结构模块包括设置在电杆杆体上的伞面、与伞面配合的伞骨以及用于撑开伞面且在竖直方向上滑动地配合在电杆杆体上的伞巢主体,驱动模块设置在电杆杆体上,驱动模块包括驱动伞巢主体在电杆杆体上滑动的驱动组件和控制驱动组件启停的控制芯片,触发模块包括环绕在电杆杆体上的电极环,电极环与控制芯片电气连接。解决了现有技术中位于农村偏远地区、林区等地配电线路电杆经常有小动物爬至电杆顶端而引发配电的线路故障,影响电网安全运行的技术
一种电杆防攀爬网架.pdf
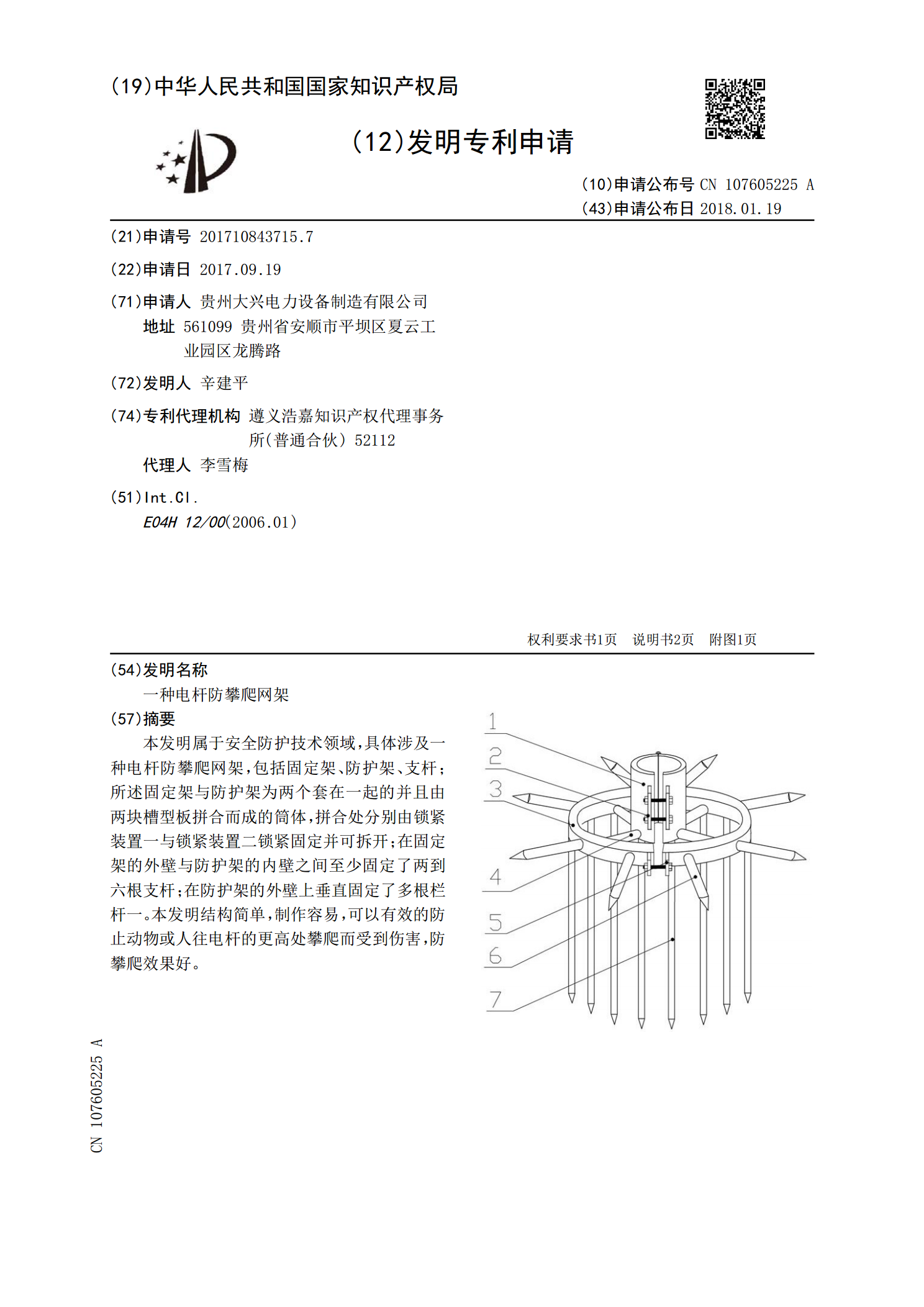
本发明属于安全防护技术领域,具体涉及一种电杆防攀爬网架,包括固定架、防护架、支杆;所述固定架与防护架为两个套在一起的并且由两块槽型板拼合而成的筒体,拼合处分别由锁紧装置一与锁紧装置二锁紧固定并可拆开;在固定架的外壁与防护架的内壁之间至少固定了两到六根支杆;在防护架的外壁上垂直固定了多根栏杆一。本发明结构简单,制作容易,可以有效的防止动物或人往电杆的更高处攀爬而受到伤害,防攀爬效果好。
一种智能树木攀爬修枝机器人.pdf
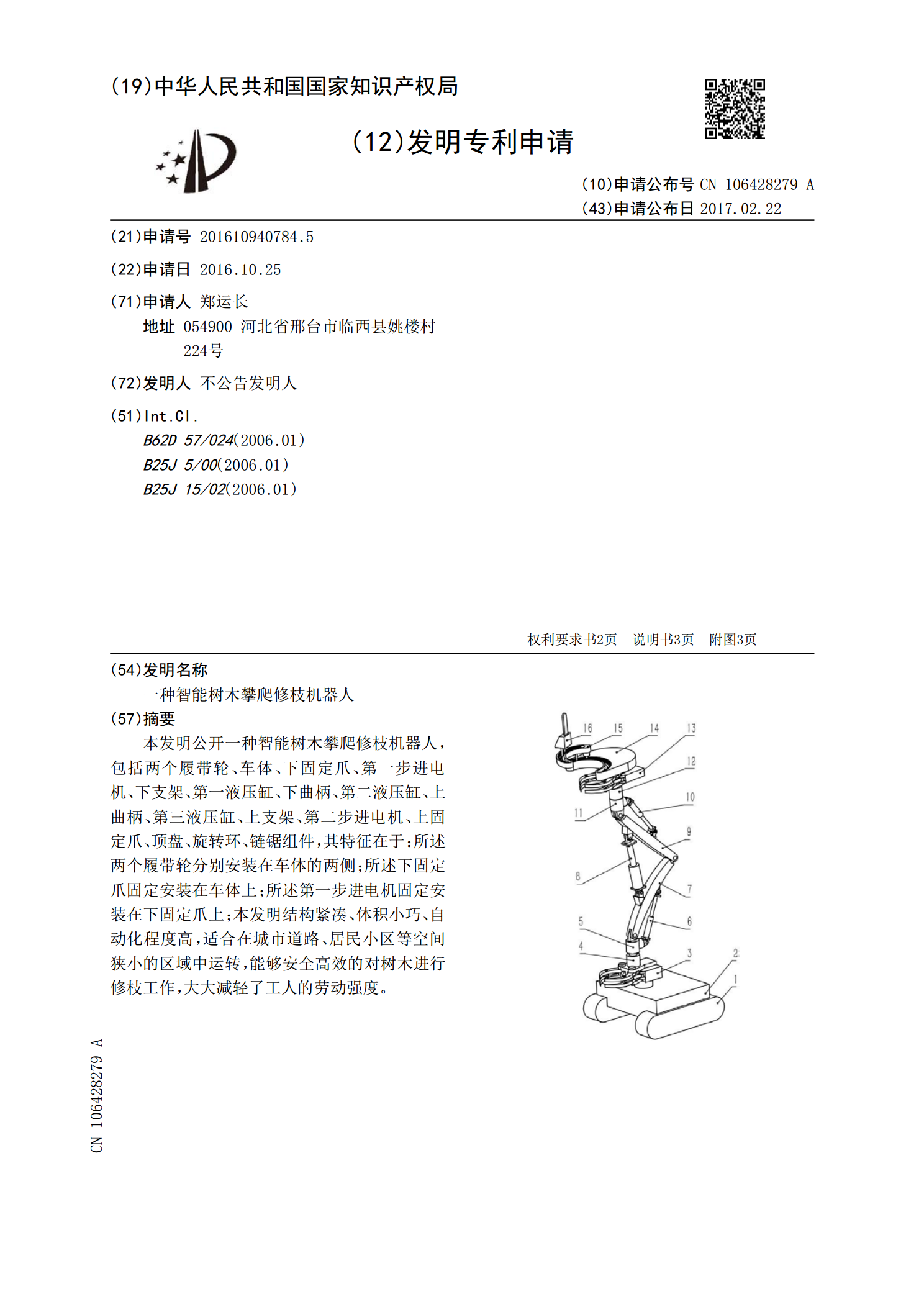
本发明公开一种智能树木攀爬修枝机器人,包括两个履带轮、车体、下固定爪、第一步进电机、下支架、第一液压缸、下曲柄、第二液压缸、上曲柄、第三液压缸、上支架、第二步进电机、上固定爪、顶盘、旋转环、链锯组件,其特征在于:所述两个履带轮分别安装在车体的两侧;所述下固定爪固定安装在车体上;所述第一步进电机固定安装在下固定爪上;本发明结构紧凑、体积小巧、自动化程度高,适合在城市道路、居民小区等空间狭小的区域中运转,能够安全高效的对树木进行修枝工作,大大减轻了工人的劳动强度。

一种智能攀爬摘果机器人.pdf
本发明公开了一种智能攀爬摘果机器人,包括八个履带轮、四个轮架、四个第一步进电机、底板、下固定爪、第二步进电机、转动板、第三步进电机、‑丝杠支座、丝杠、滑动板、第四步进电机、下转动架、第一电缸、上转动架、第二电缸、上固定爪、第五步进电机、袋子支架、固定柱、第五电缸、固定板、第六电缸、液压剪,本发明具有以下优点:本发明结构紧凑、体积小巧、自动化程度高、适合各种环境,能够安全高效地进行树木摘果工作,大大减轻了工人的劳动强度,提高了工作效率。