
自动引导车轮系舵角自动调整方法、装置和自动引导车.pdf

建英****66


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动引导车轮系舵角自动调整方法、装置和自动引导车.pdf
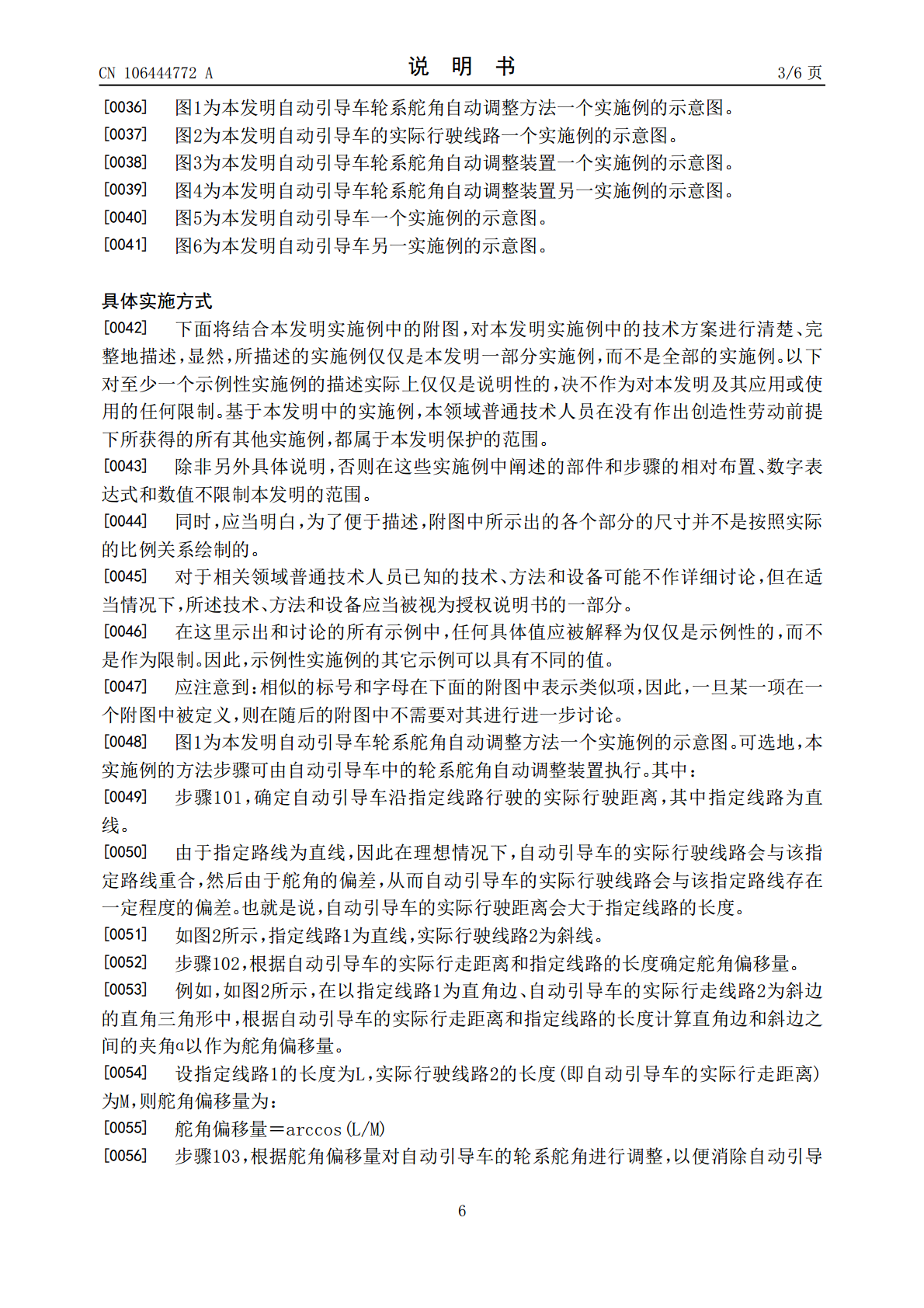
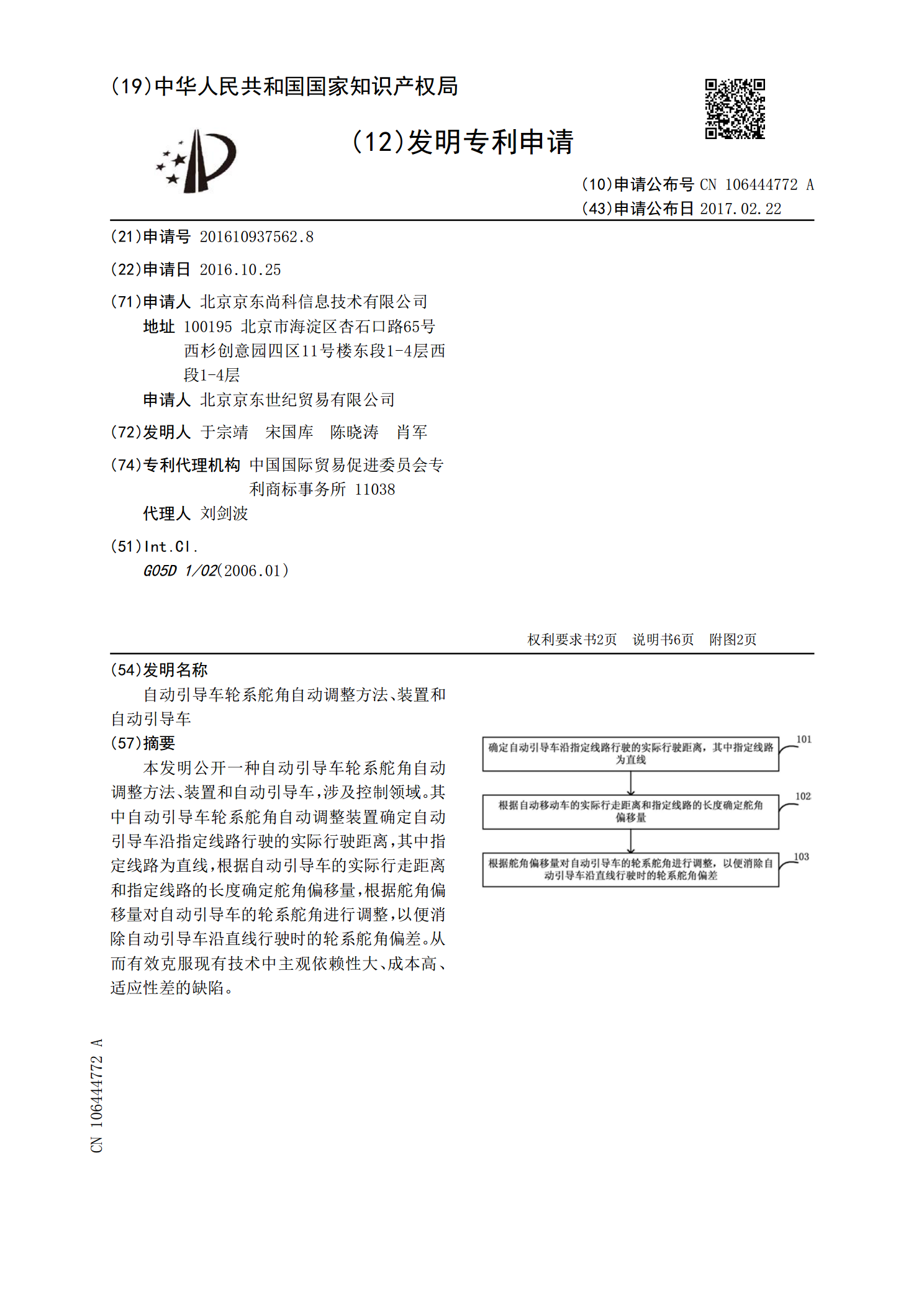
本发明公开一种自动引导车轮系舵角自动调整方法、装置和自动引导车,涉及控制领域。其中自动引导车轮系舵角自动调整装置确定自动引导车沿指定线路行驶的实际行驶距离,其中指定线路为直线,根据自动引导车的实际行走距离和指定线路的长度确定舵角偏移量,根据舵角偏移量对自动引导车的轮系舵角进行调整,以便消除自动引导车沿直线行驶时的轮系舵角偏差。从而有效克服现有技术中主观依赖性大、成本高、适应性差的缺陷。
自动引导运输车的控制方法和装置.pdf
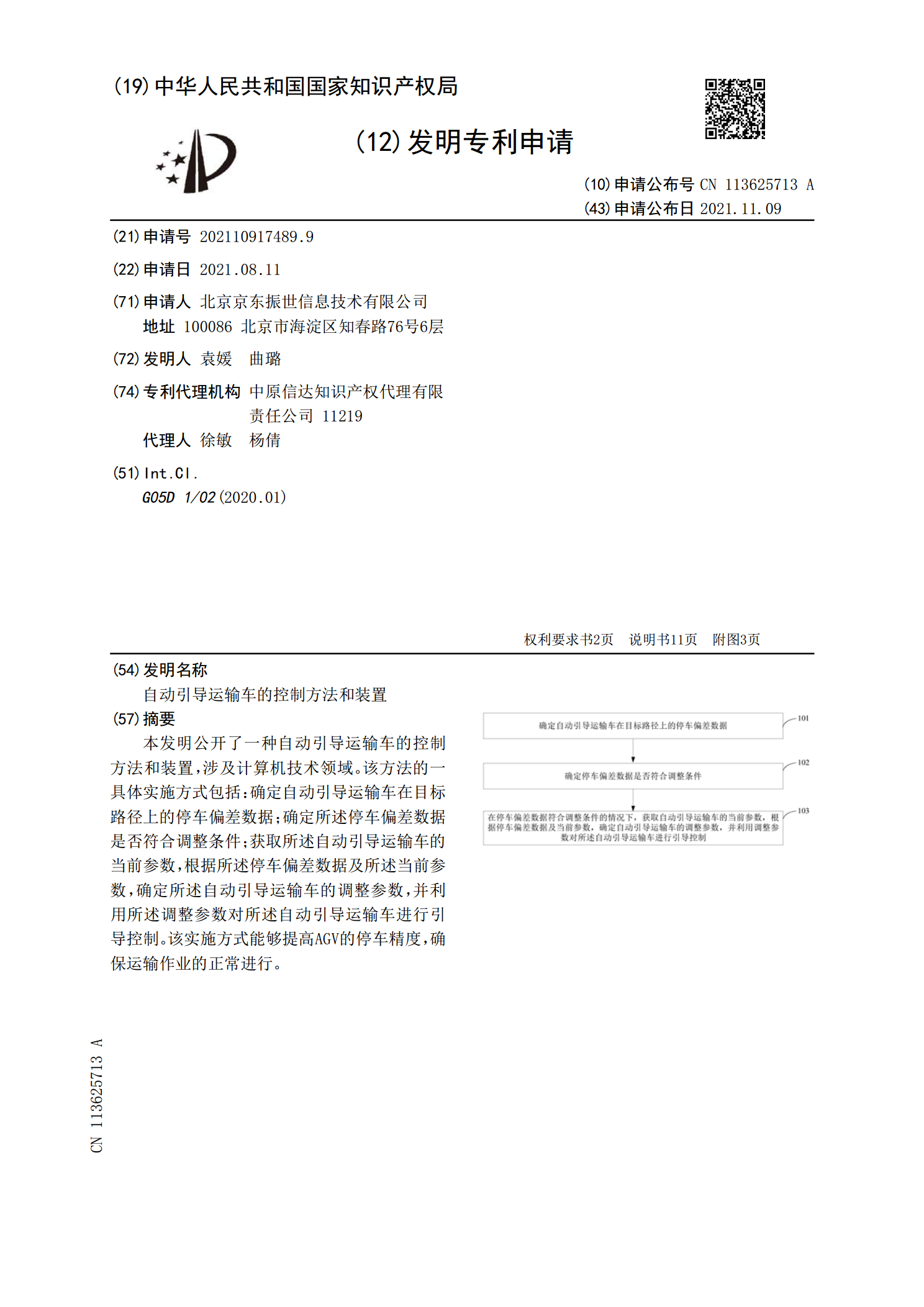
本发明公开了一种自动引导运输车的控制方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:确定自动引导运输车在目标路径上的停车偏差数据;确定所述停车偏差数据是否符合调整条件;获取所述自动引导运输车的当前参数,根据所述停车偏差数据及所述当前参数,确定所述自动引导运输车的调整参数,并利用所述调整参数对所述自动引导运输车进行引导控制。该实施方式能够提高AGV的停车精度,确保运输作业的正常进行。
自动引导车.pdf
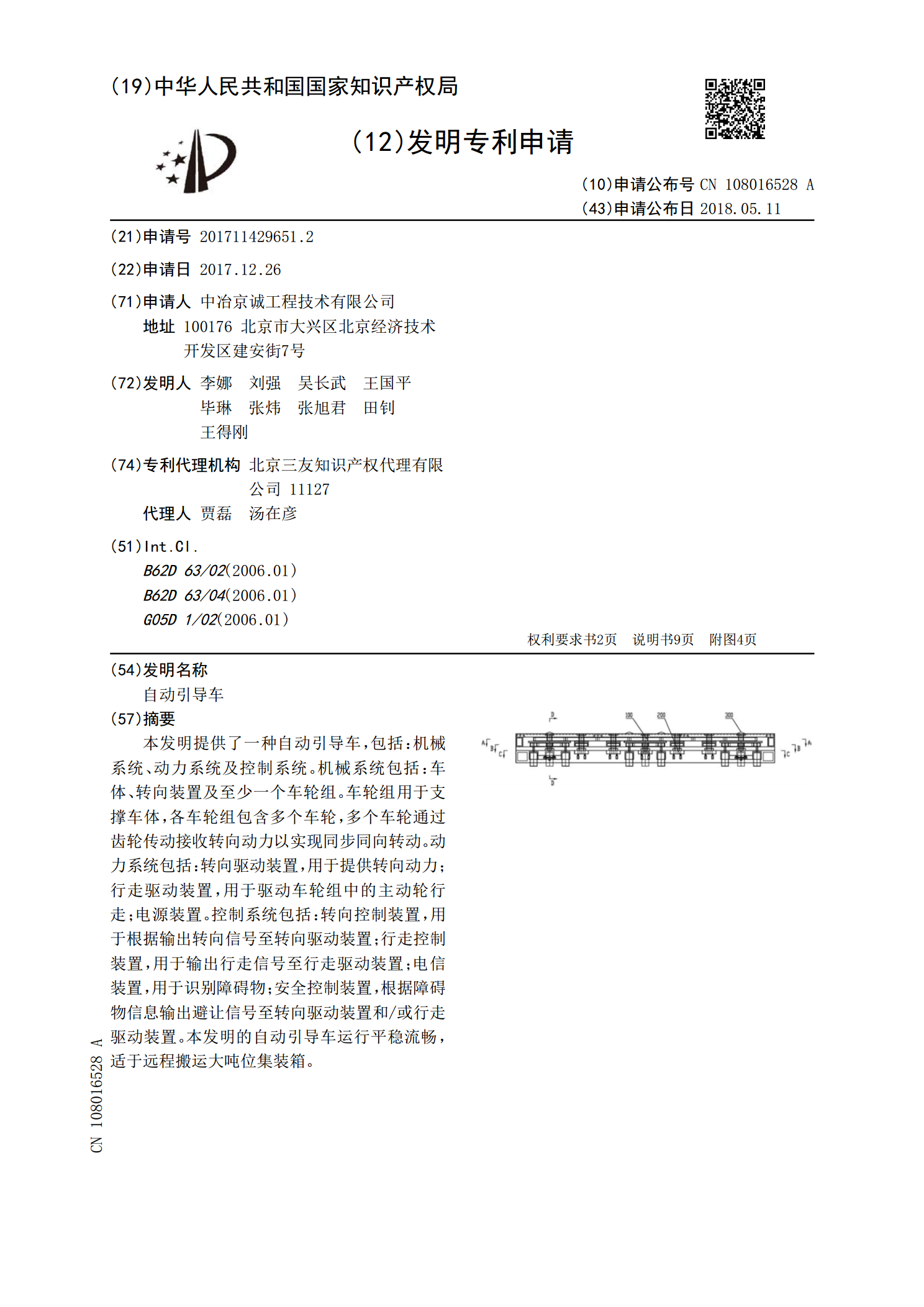
本发明提供了一种自动引导车,包括:机械系统、动力系统及控制系统。机械系统包括:车体、转向装置及至少一个车轮组。车轮组用于支撑车体,各车轮组包含多个车轮,多个车轮通过齿轮传动接收转向动力以实现同步同向转动。动力系统包括:转向驱动装置,用于提供转向动力;行走驱动装置,用于驱动车轮组中的主动轮行走;电源装置。控制系统包括:转向控制装置,用于根据输出转向信号至转向驱动装置;行走控制装置,用于输出行走信号至行走驱动装置;电信装置,用于识别障碍物;安全控制装置,根据障碍物信息输出避让信号至转向驱动装置和/或行走驱动装
自动引导车及其升降装置.pdf
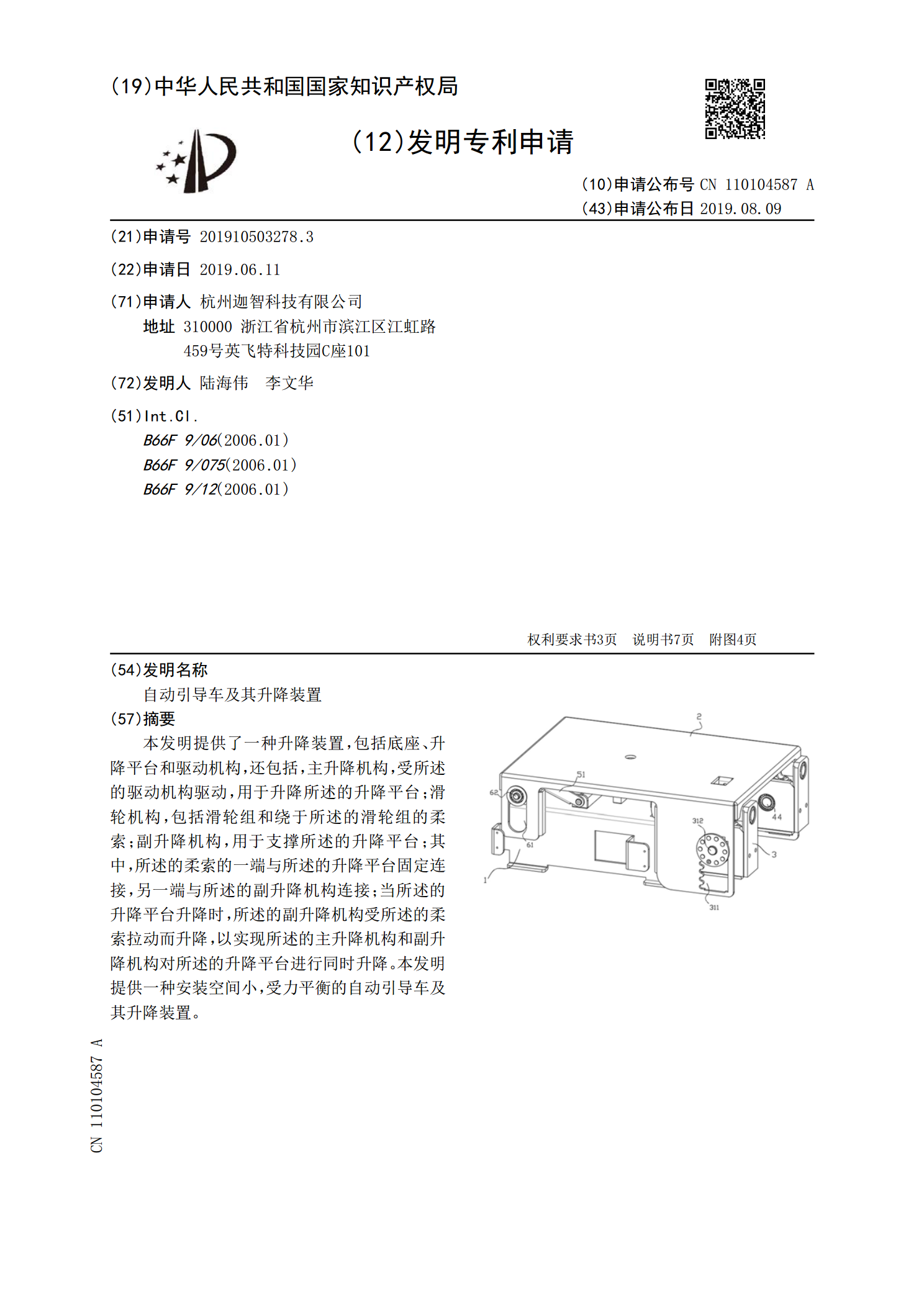
本发明提供了一种升降装置,包括底座、升降平台和驱动机构,还包括,主升降机构,受所述的驱动机构驱动,用于升降所述的升降平台;滑轮机构,包括滑轮组和绕于所述的滑轮组的柔索;副升降机构,用于支撑所述的升降平台;其中,所述的柔索的一端与所述的升降平台固定连接,另一端与所述的副升降机构连接;当所述的升降平台升降时,所述的副升降机构受所述的柔索拉动而升降,以实现所述的主升降机构和副升降机构对所述的升降平台进行同时升降。本发明提供一种安装空间小,受力平衡的自动引导车及其升降装置。
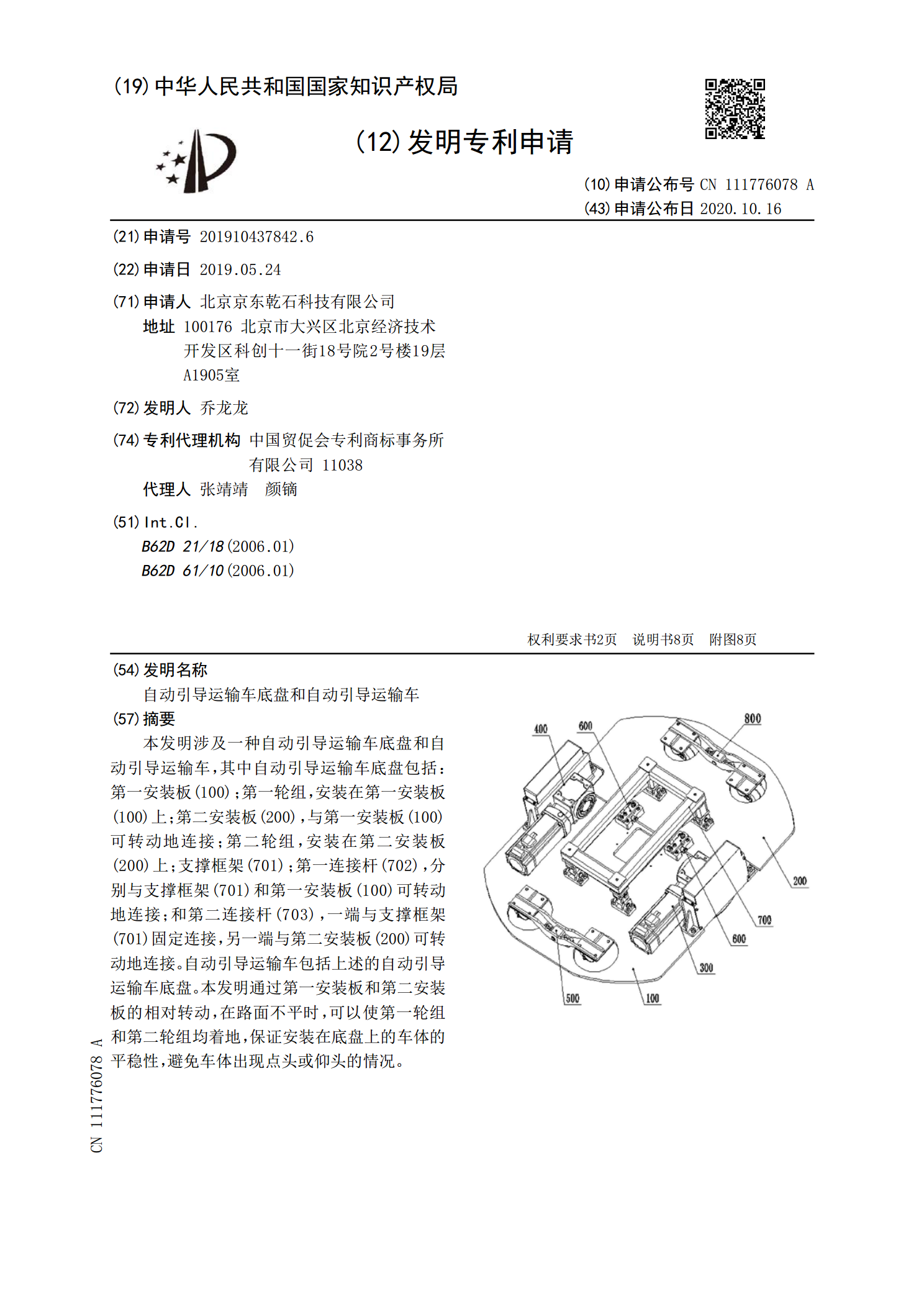
自动引导运输车底盘和自动引导运输车.pdf
本发明涉及一种自动引导运输车底盘和自动引导运输车,其中自动引导运输车底盘包括:第一安装板(100);第一轮组,安装在第一安装板(100)上;第二安装板(200),与第一安装板(100)可转动地连接;第二轮组,安装在第二安装板(200)上;支撑框架(701);第一连接杆(702),分别与支撑框架(701)和第一安装板(100)可转动地连接;和第二连接杆(703),一端与支撑框架(701)固定连接,另一端与第二安装板(200)可转动地连接。自动引导运输车包括上述的自动引导运输车底盘。本发明通过第一安装板和第二