
一种自动爬楼式清洁小车.pdf

论文****轩吖

1/6
2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动爬楼式清洁小车.pdf
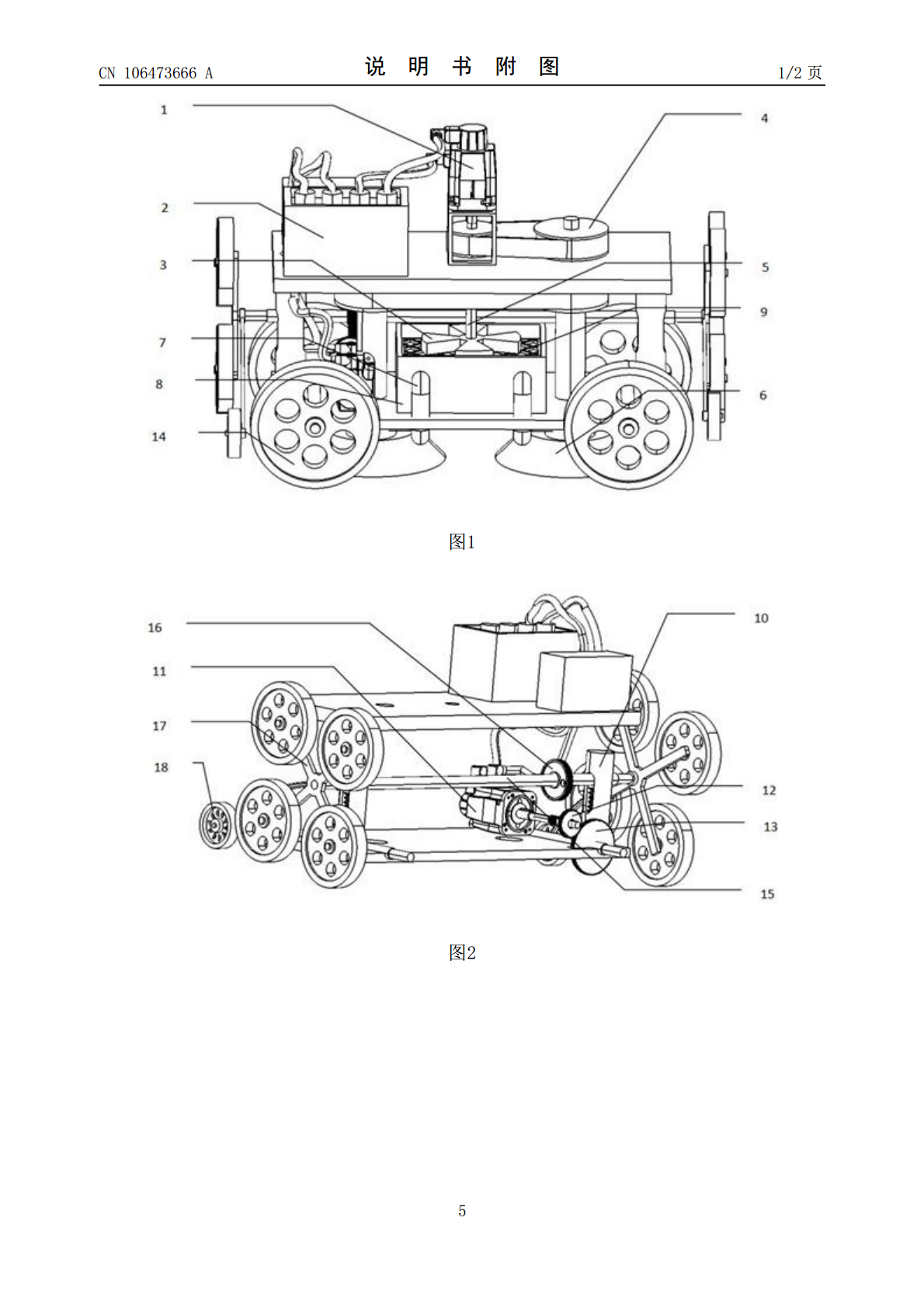
一种自动爬楼式清洁小车,是由清洁系统、传动系统和控制系统构成。其中清洁系统包括了清扫装置,主要有垃圾收纳箱8,普通减速伺服电机1提供动力,扫刷6执行清扫,吸尘装置主要有风扇3,吸风管道7,网状挡板9;传动系统主要是由前进装置和爬楼装置组成,前进装置是由齿轮12、13啮合通过轴传递动力,驱动车轮14转动,爬楼装置则是由蜗轮16和蜗杆啮合传递动力,动力由伺服电机11提供,驱动四轮旋转机构17转动;控制系统是由控制装置19、电磁感应装置10以及传感器实现。本设计具有结构紧凑,体积小,实用方便的特点,可以有效的节

一种液压式爬楼小车.pdf
本发明公开了一种液压式爬楼小车,包括车架及其底部的车轮,载物台设置在车架表面,载物台设置为活动式,包括前部的导轨及后部的固定杆,两端相互连接,中部套装在车架上,前叉及叉臂连接为L形,所述叉臂背部连接有设置在滑轨内的滑块,所述固定杆与设置在车架上的液压抬升装置连接;所述液压抬升装置包括下压杆,底部连接设置在小缸内的活塞,小缸与油缸通过管路连接,分别包括位于上方的第一通路以及位于下方的第二通路,所述两条通路分别连接有一个带有密封件的容置腔,所述密封件能够在容置腔内活动,开启或密封所在通路;其中,第一通路上插入

一种可爬楼式载货小车.pdf
一种可爬楼式载货小车,是由车体、车轮、车轮架、弹性布、车轮轴、捆物钩组成的,车轮通过车轮轴安装在车轮架上,弹性布系在车轮架上,车轮轴固定在车体上,捆物钩固定在车体两侧。该发明既可以在平地上运动,也可以爬楼运载货物,可以利用捆物钩将货物牢牢的固定在小车上,极大地减轻了人的负担,尤其是在运送沉重、体积大的货物。
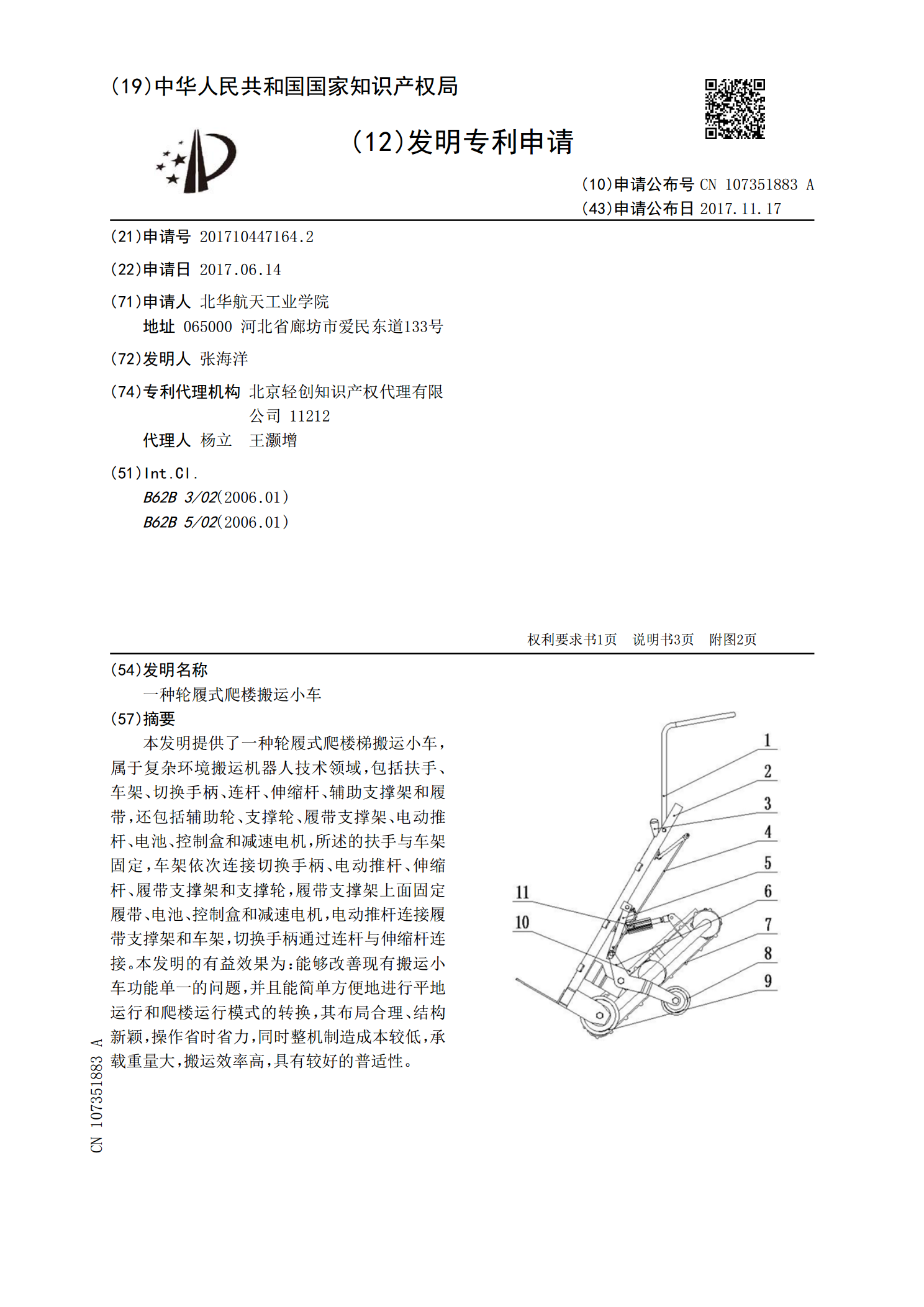
一种轮履式爬楼搬运小车.pdf
本发明提供了一种轮履式爬楼梯搬运小车,属于复杂环境搬运机器人技术领域,包括扶手、车架、切换手柄、连杆、伸缩杆、辅助支撑架和履带,还包括辅助轮、支撑轮、履带支撑架、电动推杆、电池、控制盒和减速电机,所述的扶手与车架固定,车架依次连接切换手柄、电动推杆、伸缩杆、履带支撑架和支撑轮,履带支撑架上面固定履带、电池、控制盒和减速电机,电动推杆连接履带支撑架和车架,切换手柄通过连杆与伸缩杆连接。本发明的有益效果为:能够改善现有搬运小车功能单一的问题,并且能简单方便地进行平地运行和爬楼运行模式的转换,其布局合理、结构新
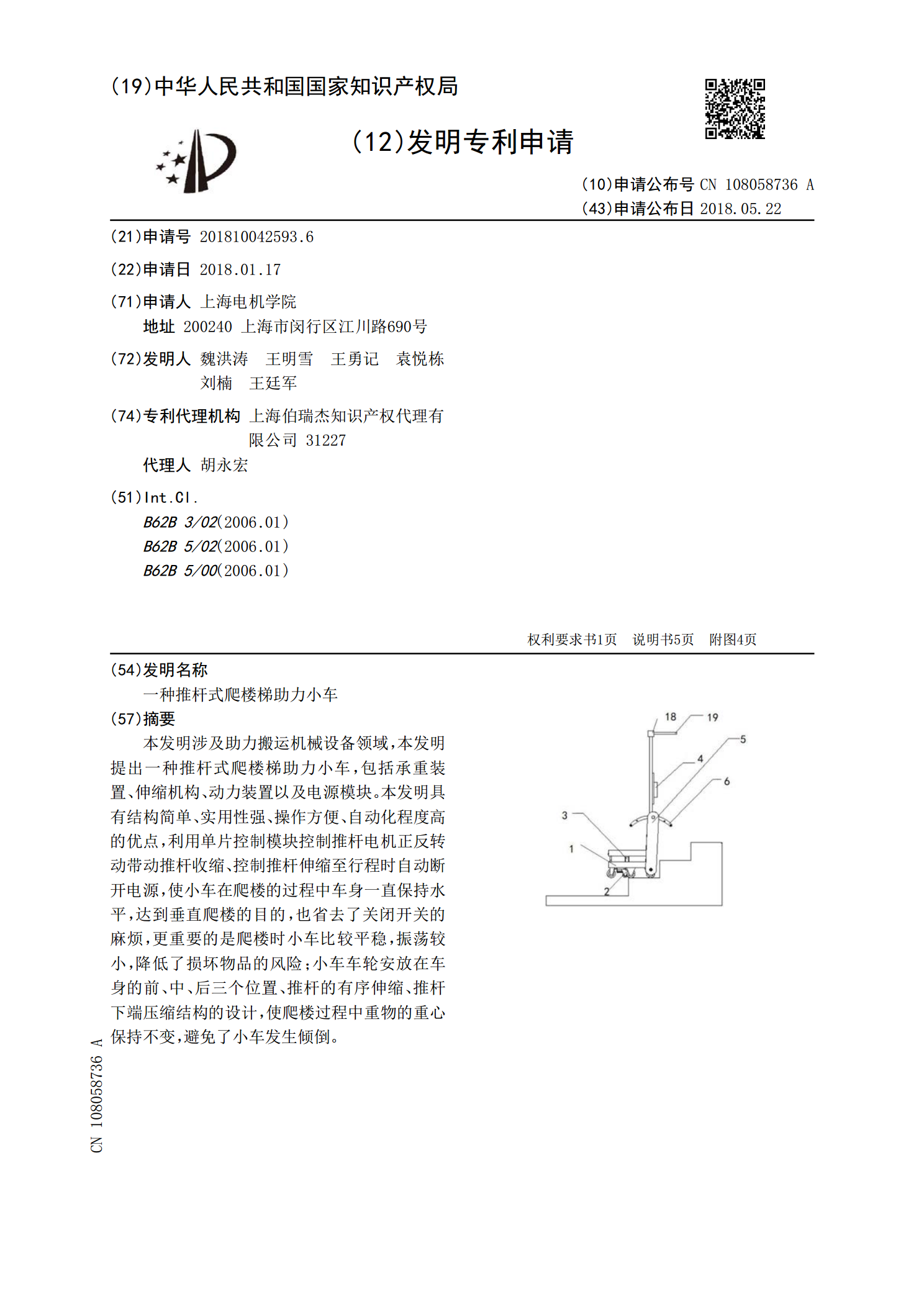
一种推杆式爬楼梯助力小车.pdf
本发明涉及助力搬运机械设备领域,本发明提出一种推杆式爬楼梯助力小车,包括承重装置、伸缩机构、动力装置以及电源模块。本发明具有结构简单、实用性强、操作方便、自动化程度高的优点,利用单片控制模块控制推杆电机正反转动带动推杆收缩、控制推杆伸缩至行程时自动断开电源,使小车在爬楼的过程中车身一直保持水平,达到垂直爬楼的目的,也省去了关闭开关的麻烦,更重要的是爬楼时小车比较平稳,振荡较小,降低了损坏物品的风险;小车车轮安放在车身的前、中、后三个位置、推杆的有序伸缩、推杆下端压缩结构的设计,使爬楼过程中重物的重心保持不