
船体清刷监测水下机器人.pdf

宏硕****mo


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

船体清刷监测水下机器人.pdf
本发明公开了一种船体清刷监测水下机器人,包括机架、转动轮、电磁铁和洗刷装置;机架内设有多个洗刷装置安装孔,洗刷装置上部为万向头固定在机架内,万向头内部为传感器安装管,万向头下端连接有万向座,万向座包括固定头和活动头,活动头与刷盘连接,刷盘中部设有轴座,轴座连接有基座,加强筋均匀分布在轴座外圆周上,基座设有多个刷板槽,刷板槽通过刷板固定孔固定有刷板,基座圆周上设有刀片固定孔用于固定刀片,刷板上表面为光滑表面,下表面设有多个凸起部,刷板一侧圆弧边设有齿部,转动轮设置在多个洗刷装置之间,电磁铁位于转向轮和主动轮
船体清刷监测水下机器人用行走装置.pdf
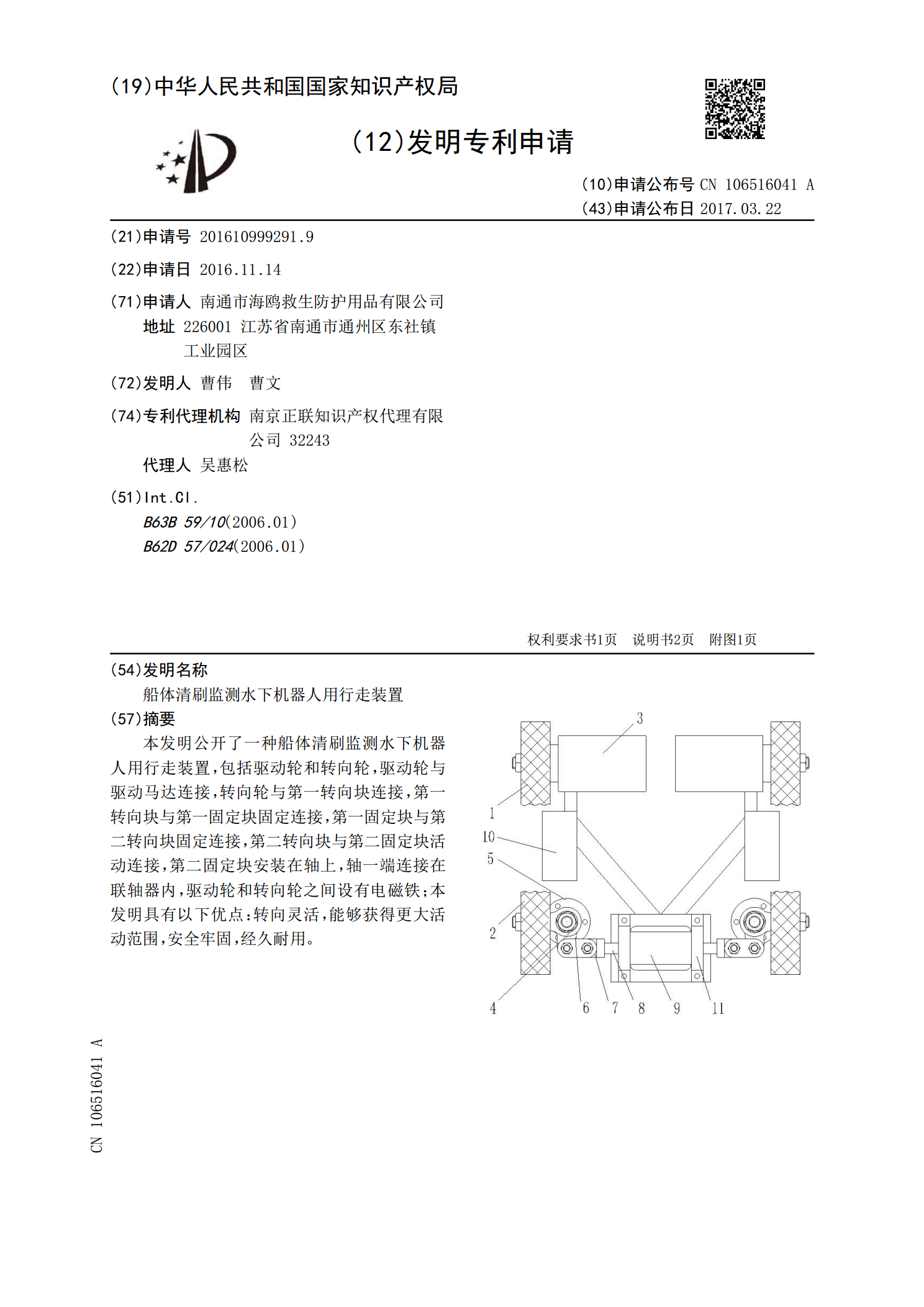
本发明公开了一种船体清刷监测水下机器人用行走装置,包括驱动轮和转向轮,驱动轮与驱动马达连接,转向轮与第一转向块连接,第一转向块与第一固定块固定连接,第一固定块与第二转向块固定连接,第二转向块与第二固定块活动连接,第二固定块安装在轴上,轴一端连接在联轴器内,驱动轮和转向轮之间设有电磁铁;本发明具有以下优点:转向灵活,能够获得更大活动范围,安全牢固,经久耐用。

船体清刷监测水下机器人用转向装置.pdf
本发明公开了一种船体清刷监测水下机器人用转向装置,包括安装板,安装板设置在机器人底盘上,安装板上设有外壳,外壳内设有联轴器,联轴器内的轴的一端连接在第一安装块上,第一安装块连接在第一转向块上,第一转向块连接在第二安装块上,第二安装块连接在第二转向块上,第二转向块与轮连接,第一安装块与第一转向块为固定连接,第一转向块与第二安装块为活动连接,第二安装块与第二转向块为固定连接,轮活动连接在第二转向块的轮轴上;本发明具有以下优点:转向灵活,能够获得更大活动范围,安全牢固,经久耐用。

水下船体清刷机器人磁吸附机构的设计与研究.docx
水下船体清刷机器人磁吸附机构的设计与研究引言船舶的船体清洗一直是一个繁琐而困难的任务。传统的清洗方式使用人工进行,存在安全问题和效率低下等诸多问题。因此,开发一种可靠的自动清洗机器人是有必要的。本文将介绍一种水下船体清刷机器人,该机器人具有磁吸附机构,从而实现了对船体的快速、有效、安全的机器人清洗。1.研究背景船舶是人类重要的交通工具之一,船体清洗是日常维护和清洁的一个关键环节。传统的清洗方式使用人工进行,这种方式不仅效率低下,而且存在极大的安全隐患,如发生溺水事故等。因此,自动化技术在船体清洗中的应用也

水下船体清洗机器人.pdf
本发明公开了一种水下船体清洗机器人,包括机器人载体以及安装于机器人载体的清洗装置和配套控制系统,所述机器人载体设有吸附式车轮和吸水回路;所述吸附式车轮的外圆周均匀设置有多个吸盘并通过吸盘与吸水回路的通断控制实现机器人载体在水中作业,本发明的水下船体清洗机器人,能够吸附于船体表面,并对船体外表面进行清洗;完成船体的水下清洗工作,减轻人员的工作量,降低成本,提高工作效率。