
一种真空吸附式倒装芯片翻转机械手.pdf

是雁****找我


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种真空吸附式倒装芯片翻转机械手.pdf
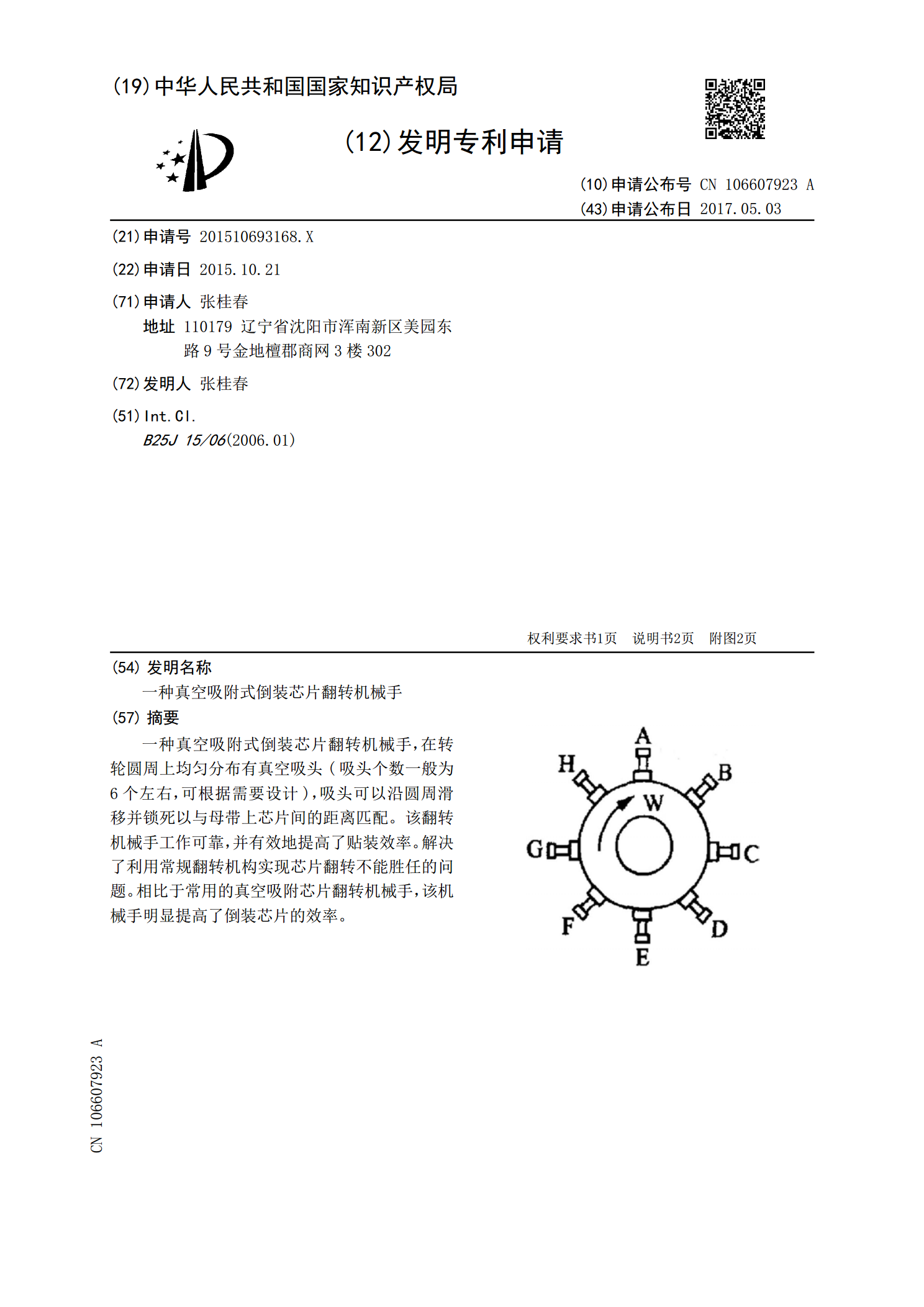
一种真空吸附式倒装芯片翻转机械手,在转轮圆周上均匀分布有真空吸头(吸头个数一般为6个左右,可根据需要设计),吸头可以沿圆周滑移并锁死以与母带上芯片间的距离匹配。该翻转机械手工作可靠,并有效地提高了贴装效率。解决了利用常规翻转机构实现芯片翻转不能胜任的问题。相比于常用的真空吸附芯片翻转机械手,该机械手明显提高了倒装芯片的效率。
一种注塑工件的翻转式吸附机械手.pdf
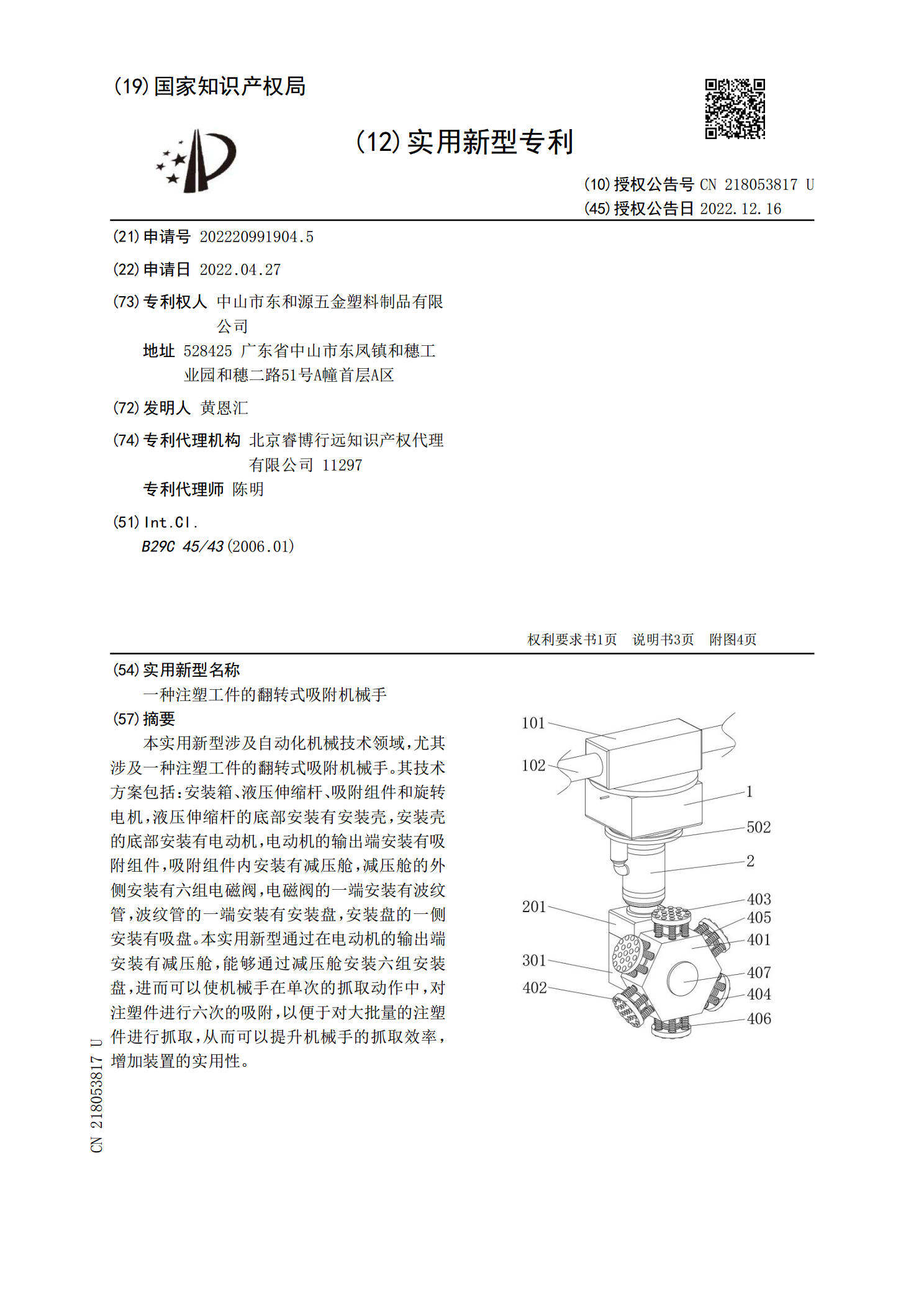
本实用新型涉及自动化机械技术领域,尤其涉及一种注塑工件的翻转式吸附机械手。其技术方案包括:安装箱、液压伸缩杆、吸附组件和旋转电机,液压伸缩杆的底部安装有安装壳,安装壳的底部安装有电动机,电动机的输出端安装有吸附组件,吸附组件内安装有减压舱,减压舱的外侧安装有六组电磁阀,电磁阀的一端安装有波纹管,波纹管的一端安装有安装盘,安装盘的一侧安装有吸盘。本实用新型通过在电动机的输出端安装有减压舱,能够通过减压舱安装六组安装盘,进而可以使机械手在单次的抓取动作中,对注塑件进行六次的吸附,以便于对大批量的注塑件进行抓取
一种吸盘便于更换的真空吸附式机械手.pdf
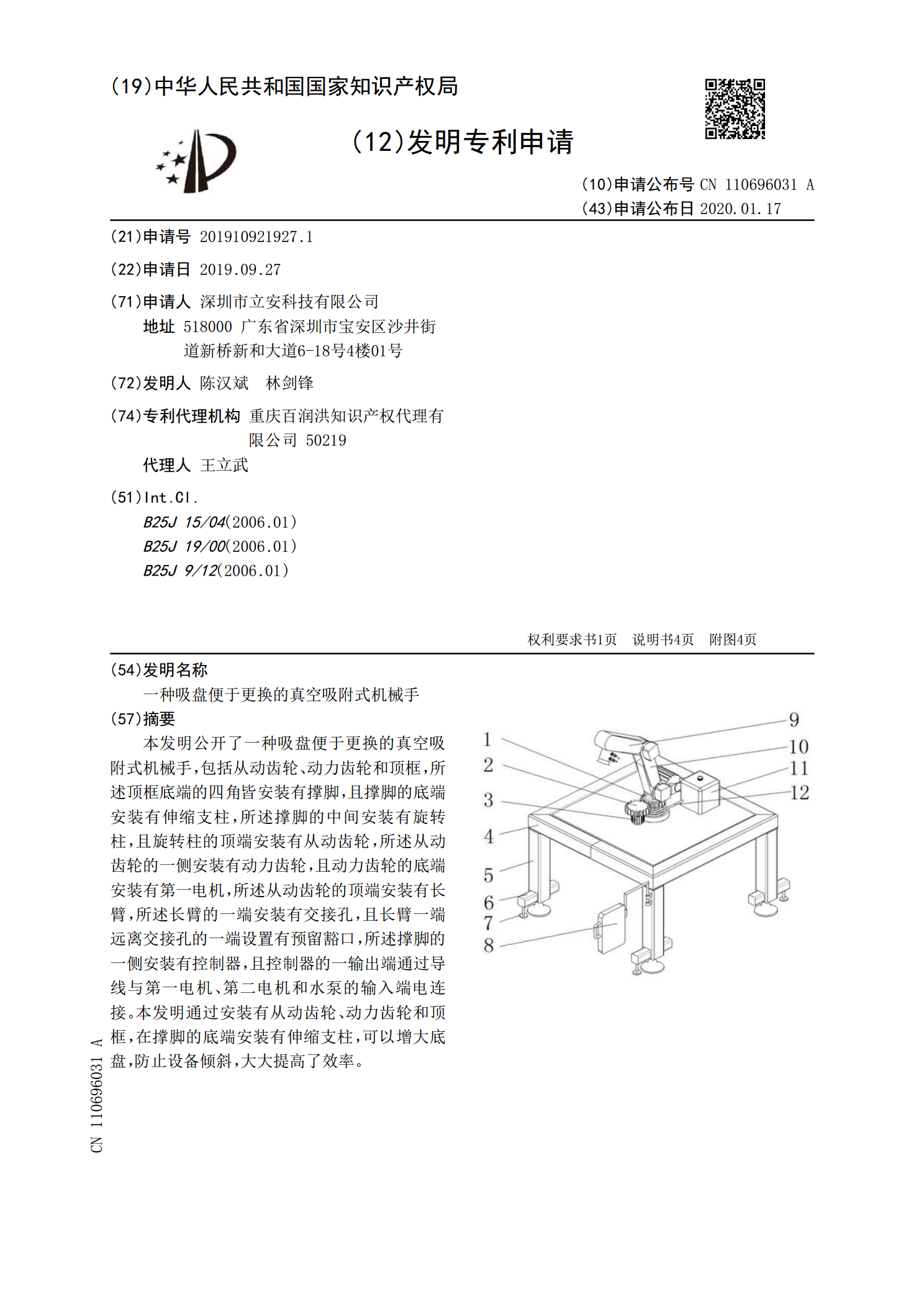
本发明公开了一种吸盘便于更换的真空吸附式机械手,包括从动齿轮、动力齿轮和顶框,所述顶框底端的四角皆安装有撑脚,且撑脚的底端安装有伸缩支柱,所述撑脚的中间安装有旋转柱,且旋转柱的顶端安装有从动齿轮,所述从动齿轮的一侧安装有动力齿轮,且动力齿轮的底端安装有第一电机,所述从动齿轮的顶端安装有长臂,所述长臂的一端安装有交接孔,且长臂一端远离交接孔的一端设置有预留豁口,所述撑脚的一侧安装有控制器,且控制器的一输出端通过导线与第一电机、第二电机和水泵的输入端电连接。本发明通过安装有从动齿轮、动力齿轮和顶框,在撑脚的底

一种翻转式机械手.pdf
本发明涉及机械手设备技术领域,具体涉及一种翻转式机械手,包括基座组件、分别设置于所述基座组件的正向驱动机构和反向驱动机构,所述基座组件上还设置有正向翻转机构和反向翻转机构,所述正向驱动机构驱动所述正向翻转机构翻转,所述反向驱动机构驱动所述反向翻转机构翻转;所述正向翻转机构包括正旋齿轮、与所述正旋齿轮连接的第一翻转板安装杆以及与所述第一翻转板安装杆连接的正向翻转板;所述反向翻转机构包括反旋齿轮、与第所述反旋齿轮连接的第二翻转板安装杆以及与所述第二翻转板安装杆连接的反向翻转板。本发明的机械手利用正向翻转机构和
一种翻转式芯片批量定位装置.pdf
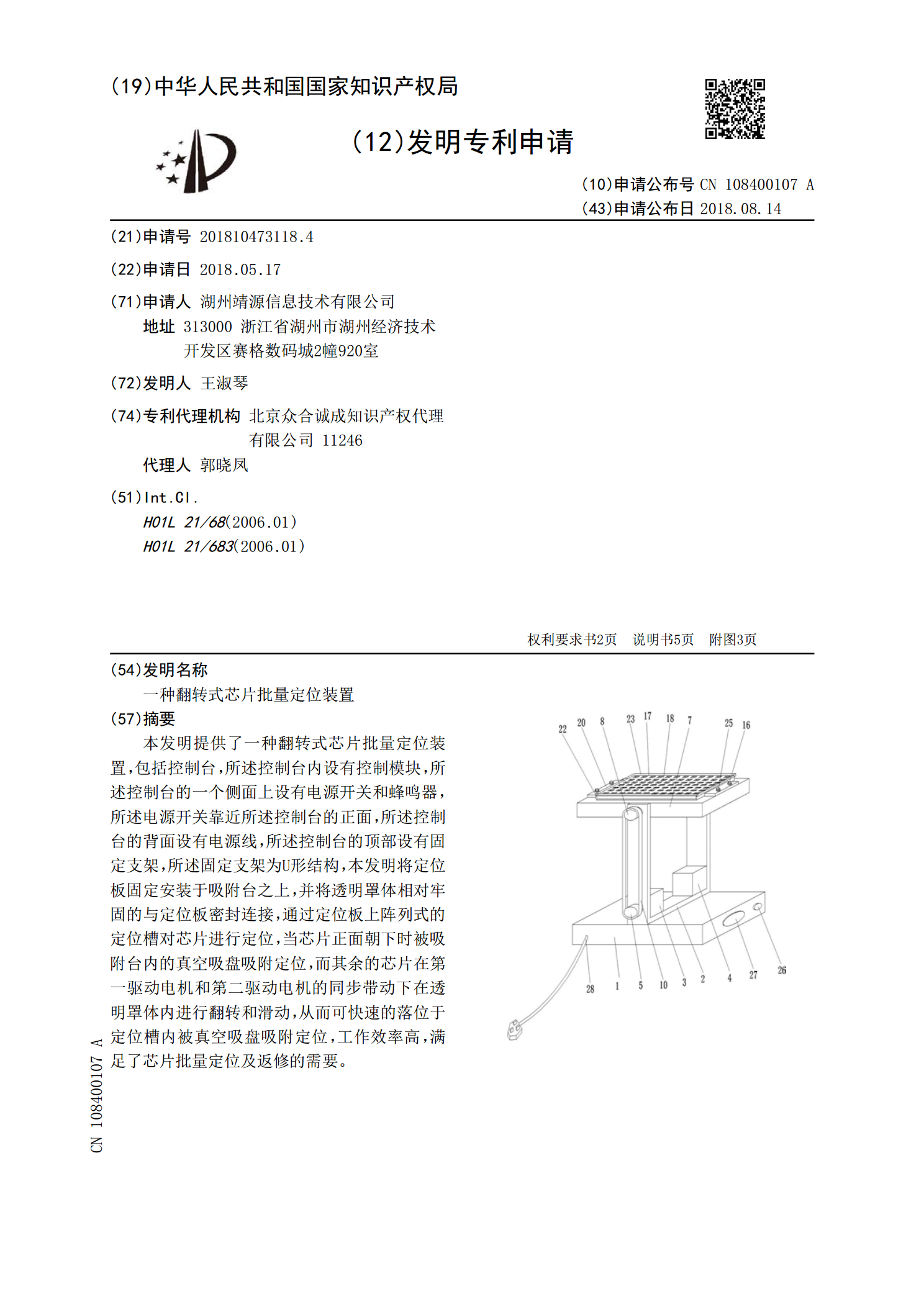
本发明提供了一种翻转式芯片批量定位装置,包括控制台,所述控制台内设有控制模块,所述控制台的一个侧面上设有电源开关和蜂鸣器,所述电源开关靠近所述控制台的正面,所述控制台的背面设有电源线,所述控制台的顶部设有固定支架,所述固定支架为U形结构,本发明将定位板固定安装于吸附台之上,并将透明罩体相对牢固的与定位板密封连接,通过定位板上阵列式的定位槽对芯片进行定位,当芯片正面朝下时被吸附台内的真空吸盘吸附定位,而其余的芯片在第一驱动电机和第二驱动电机的同步带动下在透明罩体内进行翻转和滑动,从而可快速的落位于定位槽内被