
一种多形变铸件修磨加工方法.pdf

雨巷****可歆

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多形变铸件修磨加工方法.pdf
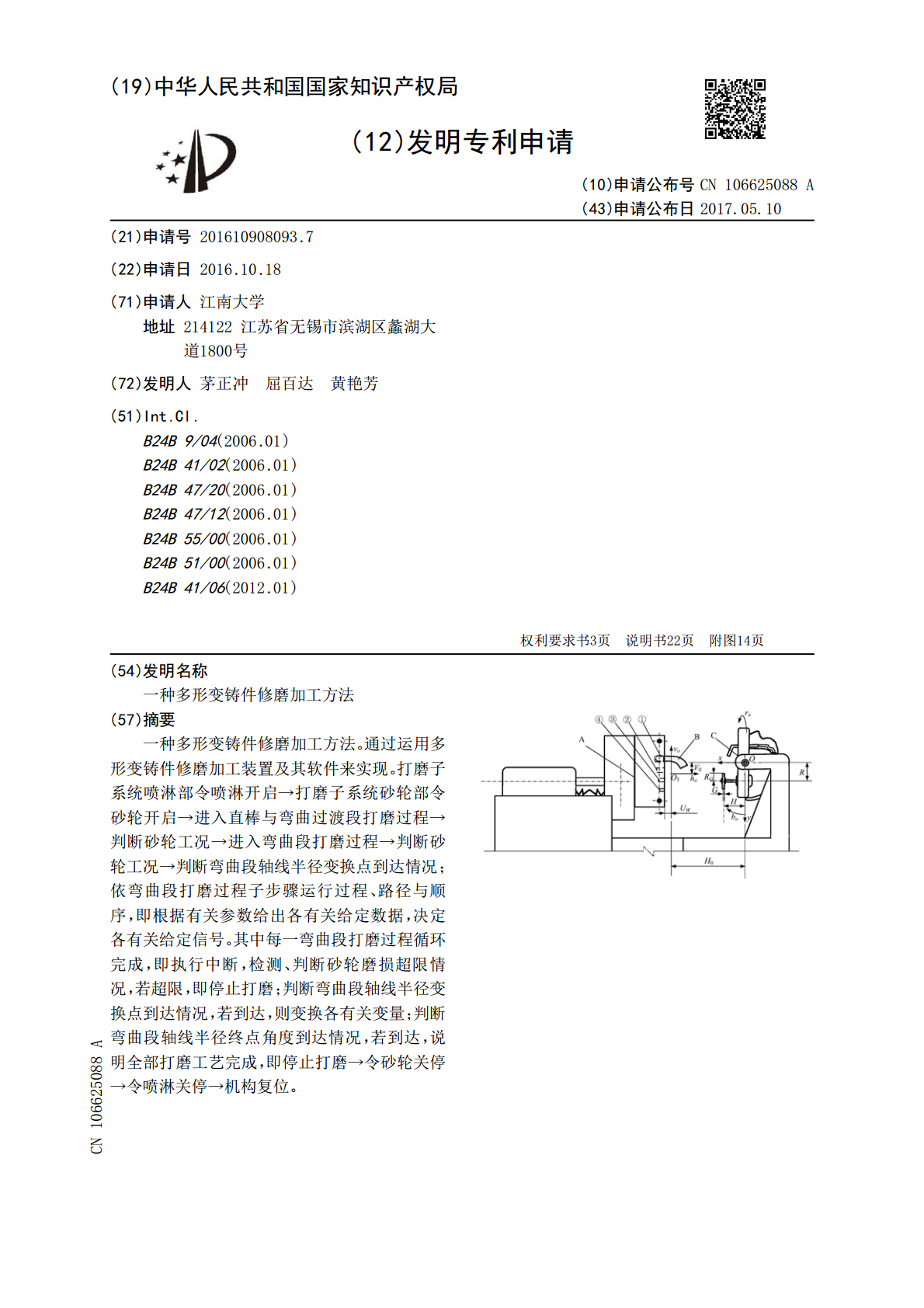
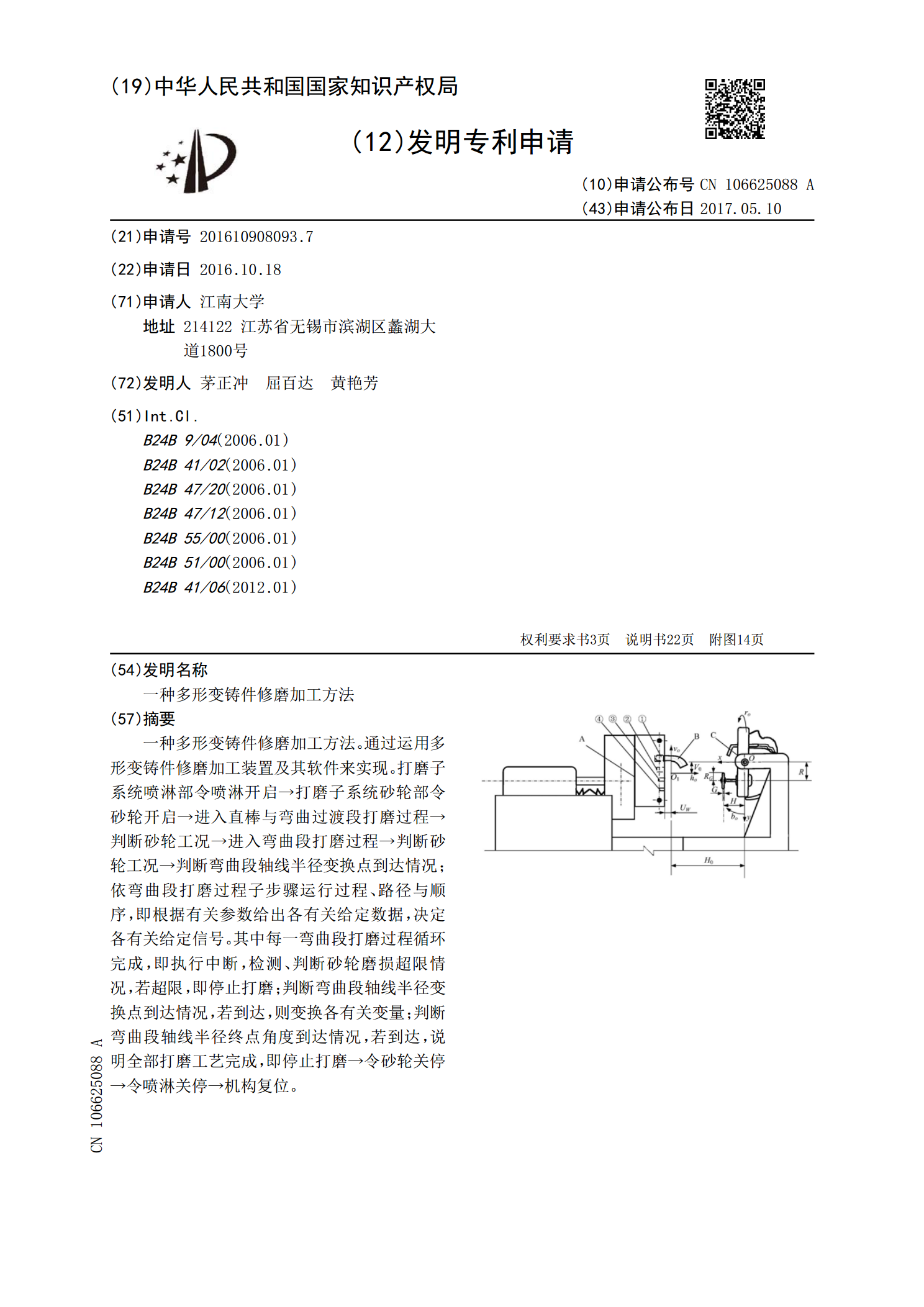
一种多形变铸件修磨加工方法。通过运用多形变铸件修磨加工装置及其软件来实现。打磨子系统喷淋部令喷淋开启→打磨子系统砂轮部令砂轮开启→进入直棒与弯曲过渡段打磨过程→判断砂轮工况→进入弯曲段打磨过程→判断砂轮工况→判断弯曲段轴线半径变换点到达情况;依弯曲段打磨过程子步骤运行过程、路径与顺序,即根据有关参数给出各有关给定数据,决定各有关给定信号。其中每一弯曲段打磨过程循环完成,即执行中断,检测、判断砂轮磨损超限情况,若超限,即停止打磨;判断弯曲段轴线半径变换点到达情况,若到达,则变换各有关变量;判断弯曲段轴线半径
一种多形变铸件修磨加工系统.pdf
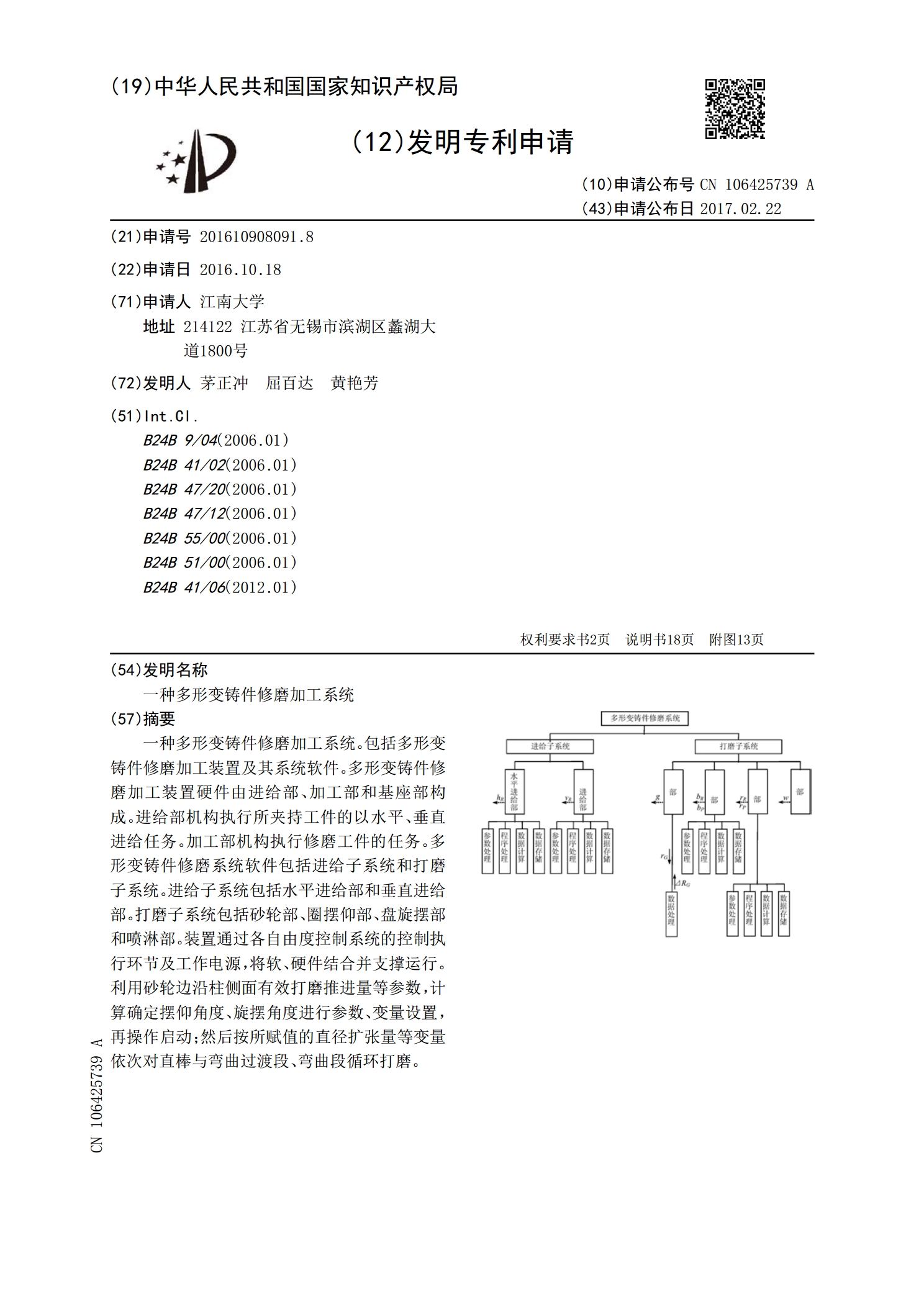
一种多形变铸件修磨加工系统。包括多形变铸件修磨加工装置及其系统软件。多形变铸件修磨加工装置硬件由进给部、加工部和基座部构成。进给部机构执行所夹持工件的以水平、垂直进给任务。加工部机构执行修磨工件的任务。多形变铸件修磨系统软件包括进给子系统和打磨子系统。进给子系统包括水平进给部和垂直进给部。打磨子系统包括砂轮部、圈摆仰部、盘旋摆部和喷淋部。装置通过各自由度控制系统的控制执行环节及工作电源,将软、硬件结合并支撑运行。利用砂轮边沿柱侧面有效打磨推进量等参数,计算确定摆仰角度、旋摆角度进行参数、变量设置,再操作启

一种多形变铸件修磨加工机构.pdf
多形变铸件修磨加工机构。包括砂轮电动机、摆仰杆、悬臂、圈摆仰轴结构、加工部伸缩电缆、圈摆体、喷淋管和砂轮。圈摆体为圆环形结构,环内套装旋盘;圈摆体通过旋盘轴承机构与旋盘构成切向滚滑动配合;圈摆体的上部制成旋摆驱动部;旋摆驱动部通过盘圈啮合部,带动旋盘在圈摆体内旋转。旋盘的左上面为加工工作面,配有用以覆盖整个旋盘和旋盘轴承机构的防护板。旋盘的上中位穿套有喷淋管;喷淋管的左部向下弯曲,管口以喷嘴朝向砂轮;喷淋管的右端接有喷淋伸缩管;通过喷淋伸缩管,喷淋管贯通、引入、连接到喷淋操作执行系统。旋盘的下中位装配有装
一种多形变铸件修磨的喷淋方法.pdf
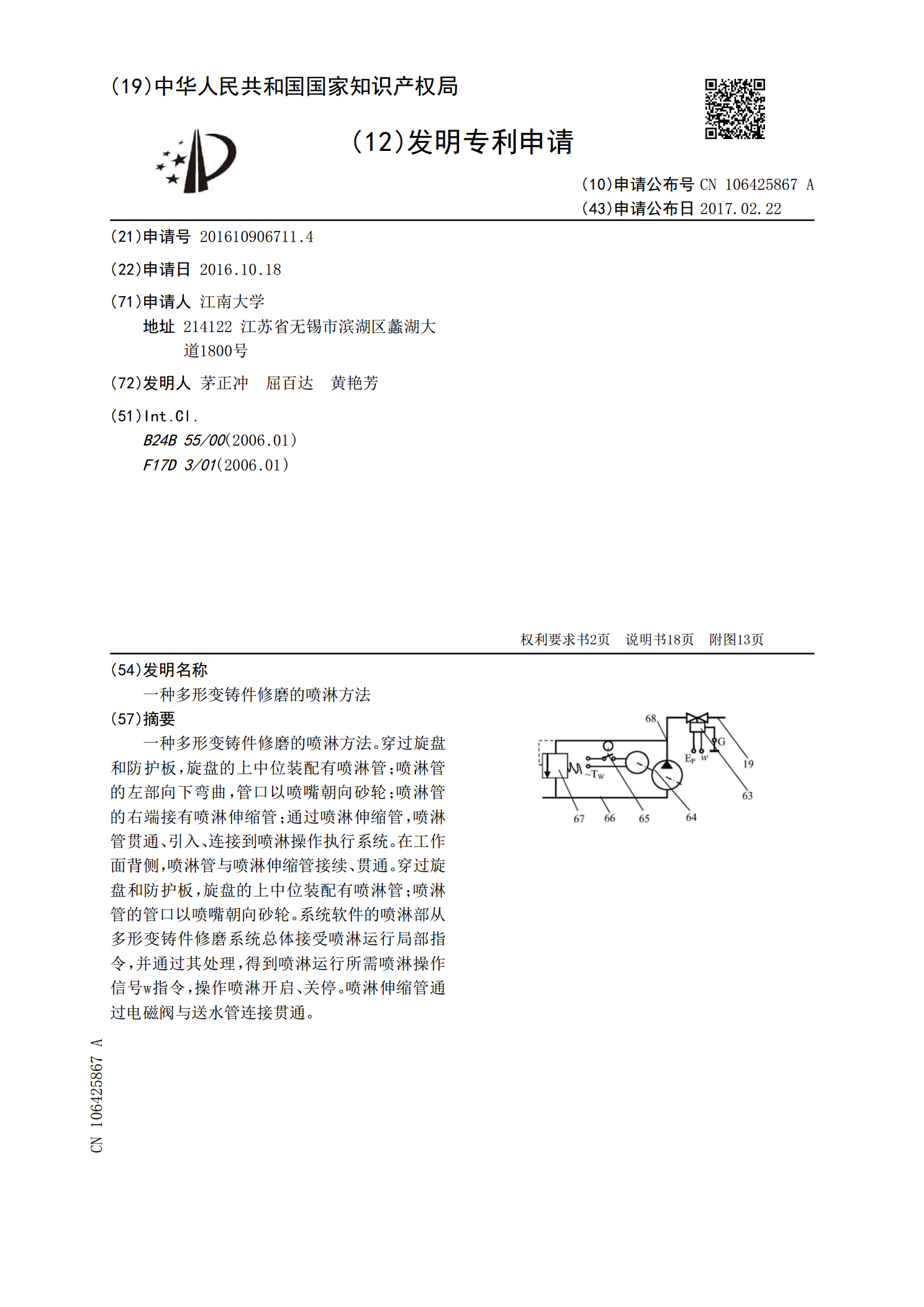
一种多形变铸件修磨的喷淋方法。穿过旋盘和防护板,旋盘的上中位装配有喷淋管;喷淋管的左部向下弯曲,管口以喷嘴朝向砂轮;喷淋管的右端接有喷淋伸缩管;通过喷淋伸缩管,喷淋管贯通、引入、连接到喷淋操作执行系统。在工作面背侧,喷淋管与喷淋伸缩管接续、贯通。穿过旋盘和防护板,旋盘的上中位装配有喷淋管;喷淋管的管口以喷嘴朝向砂轮。系统软件的喷淋部从多形变铸件修磨系统总体接受喷淋运行局部指令,并通过其处理,得到喷淋运行所需喷淋操作信号w指令,操作喷淋开启、关停。喷淋伸缩管通过电磁阀与送水管连接贯通。

一种多形变铸件修磨进给机构.pdf
多形变铸件修磨进给机构。包括液压缸、活塞杆、进给部伸缩电缆、进给部水平动体、进给部垂直动体。液压缸装配于机座进给部左上部;活塞杆右伸,且右端紧固连接进给部水平动体。进给部水平动体右贴进给部垂直动体,且其右侧面与进给部垂直动体的左侧面纵向滑动配合。水平动体燕尾滑槽的左底面上部,贴装有垂直进给位移位移传感器。在进给部水平动体的中心部,挖有驱动机构室;驱动机构室装配有垂直进给涡轮驱动机构。在垂直动体上,与进给部水平动体滑动配合的左侧面,铣有燕尾凸肩部;燕尾凸肩部楔入水平动体燕尾滑槽并与之构成纵向滑动配合。机座进