
四驱混合动力汽车及其控制系统和方法.pdf

邻家****ng


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
四驱混合动力汽车及其控制系统和方法.pdf
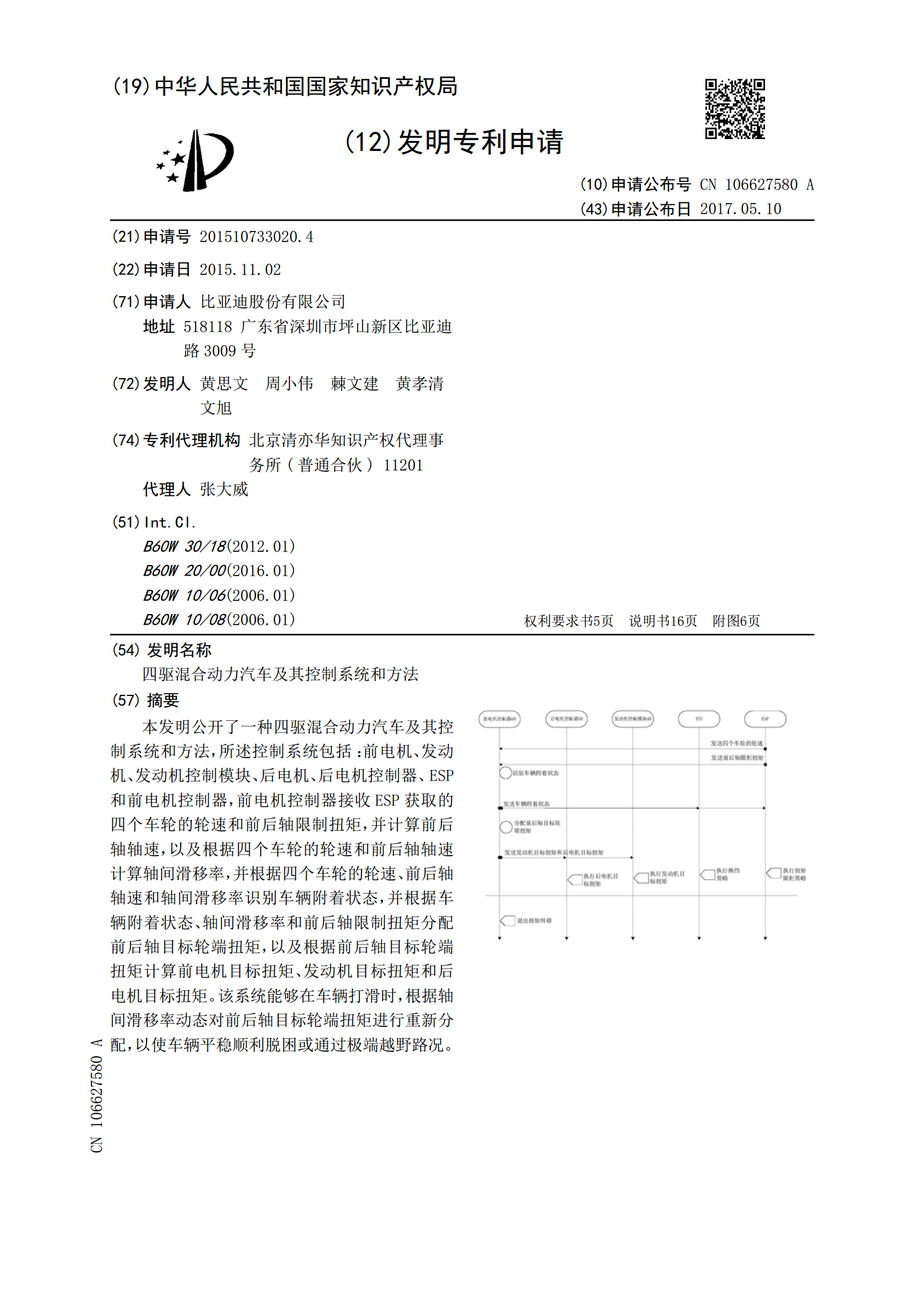
本发明公开了一种四驱混合动力汽车及其控制系统和方法,所述控制系统包括:前电机、发动机、发动机控制模块、后电机、后电机控制器、ESP和前电机控制器,前电机控制器接收ESP获取的四个车轮的轮速和前后轴限制扭矩,并计算前后轴轴速,以及根据四个车轮的轮速和前后轴轴速计算轴间滑移率,并根据四个车轮的轮速、前后轴轴速和轴间滑移率识别车辆附着状态,并根据车辆附着状态、轴间滑移率和前后轴限制扭矩分配前后轴目标轮端扭矩,以及根据前后轴目标轮端扭矩计算前电机目标扭矩、发动机目标扭矩和后电机目标扭矩。该系统能够在车辆打滑时,根
混合动力汽车的四驱系统和四驱方法以及混合动力汽车.pdf
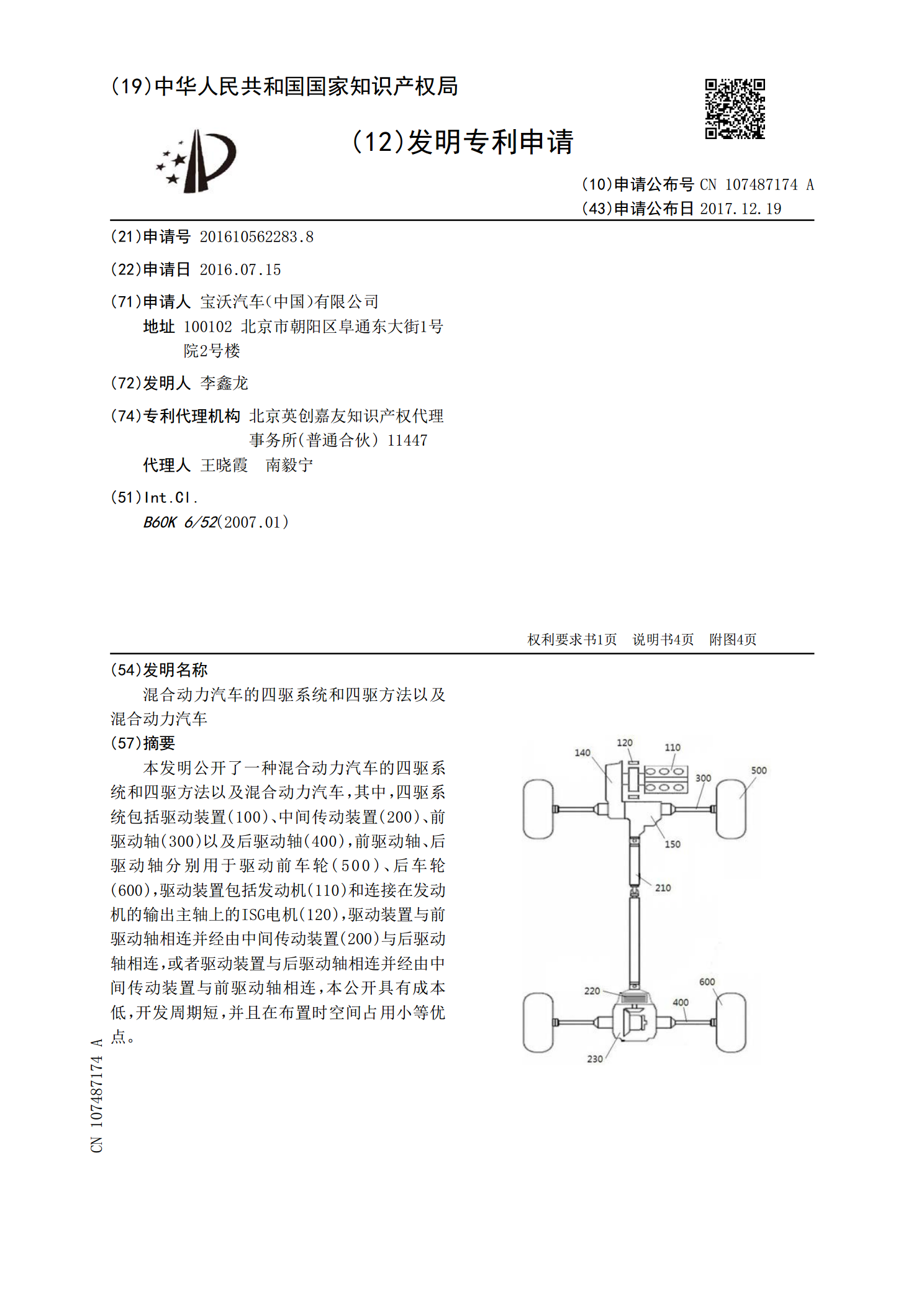
本发明公开了一种混合动力汽车的四驱系统和四驱方法以及混合动力汽车,其中,四驱系统包括驱动装置(100)、中间传动装置(200)、前驱动轴(300)以及后驱动轴(400),前驱动轴、后驱动轴分别用于驱动前车轮(500)、后车轮(600),驱动装置包括发动机(110)和连接在发动机的输出主轴上的ISG电机(120),驱动装置与前驱动轴相连并经由中间传动装置(200)与后驱动轴相连,或者驱动装置与后驱动轴相连并经由中间传动装置与前驱动轴相连,本公开具有成本低,开发周期短,并且在布置时空间占用小等优点。

四驱混合动力汽车及其控制方法.pdf
本发明提出一种四驱混合动力汽车及其控制方法。其中所述四驱混合动力汽车包括:前轮和后轮;轮毂电机,轮毂电机与前轮相连,用于驱动前轮;发动机,发动机通过变速器与后轮相连,用于驱动后轮;ISG电机,ISG电机连接在发动机与变速器之间,用于驱动后轮;离合器,离合器连接在发动机和ISG电机之间;逆变器,逆变器分别与轮毂电机和ISG电机相连;和动力电池,动力电池与逆变器相连,用于为轮毂电机和ISG电机提供动力。根据本发明的四驱混合动力汽车,提高了汽车的爬坡、启动和加速等性能,实现了四轮的纯电动驱动,简化了前轮驱动装置

一种四驱混合动力汽车的控制系统、方法和汽车.pdf
一种四驱混合动力汽车的控制系统、方法和汽车,本申请实施例提供一种四驱混合动力汽车的动力系统,包括前驱动单元和后驱动单元,前驱动单元用于驱动汽车的前轮,后驱动单元用于通过后驱电机驱动汽车的后轮,前驱动单元包括:安装在前驱动桥上的前驱电机、发动机以及前桥变速箱;前驱电机通过前桥变速箱与汽车的前轮连接;前桥变速箱中设置有前桥离合器,发动机通过前桥离合器实现与前轮的连接或断开。本申请方案设置前桥变速箱实现前驱电机与汽车的前轮的连接,并且通过在前桥变速箱中设置的前桥离合器实现发动机与汽车的前轮的连接或断开,在发动机

混合动力四驱汽车驱动系统及方法.pdf
本发明公开了一种混合动力四驱汽车驱动系统及方法,系统包括电池模块、发动机模块、发电机和变速箱,所述发动机模块通过发电机连接变速箱,所述变速箱通过传动轴和驱动桥驱动汽车前轮,混合动力四驱汽车驱动系统还包括电动机和差速器,所述电池模块分别与发电机和电动机电连接,电动机连接差速器,所述差速器驱动汽车后轮。本系统将汽车制动和下坡时的动力收集转化为电能进行存储,在需要四轮驱动的时候通过存储的电能使电动机工作驱动后轮,节约能源,提高整车经济性。本发明适用于混合动力的四驱汽车。