
一种线性联动伸缩装置.pdf

玉环****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线性联动伸缩装置.pdf
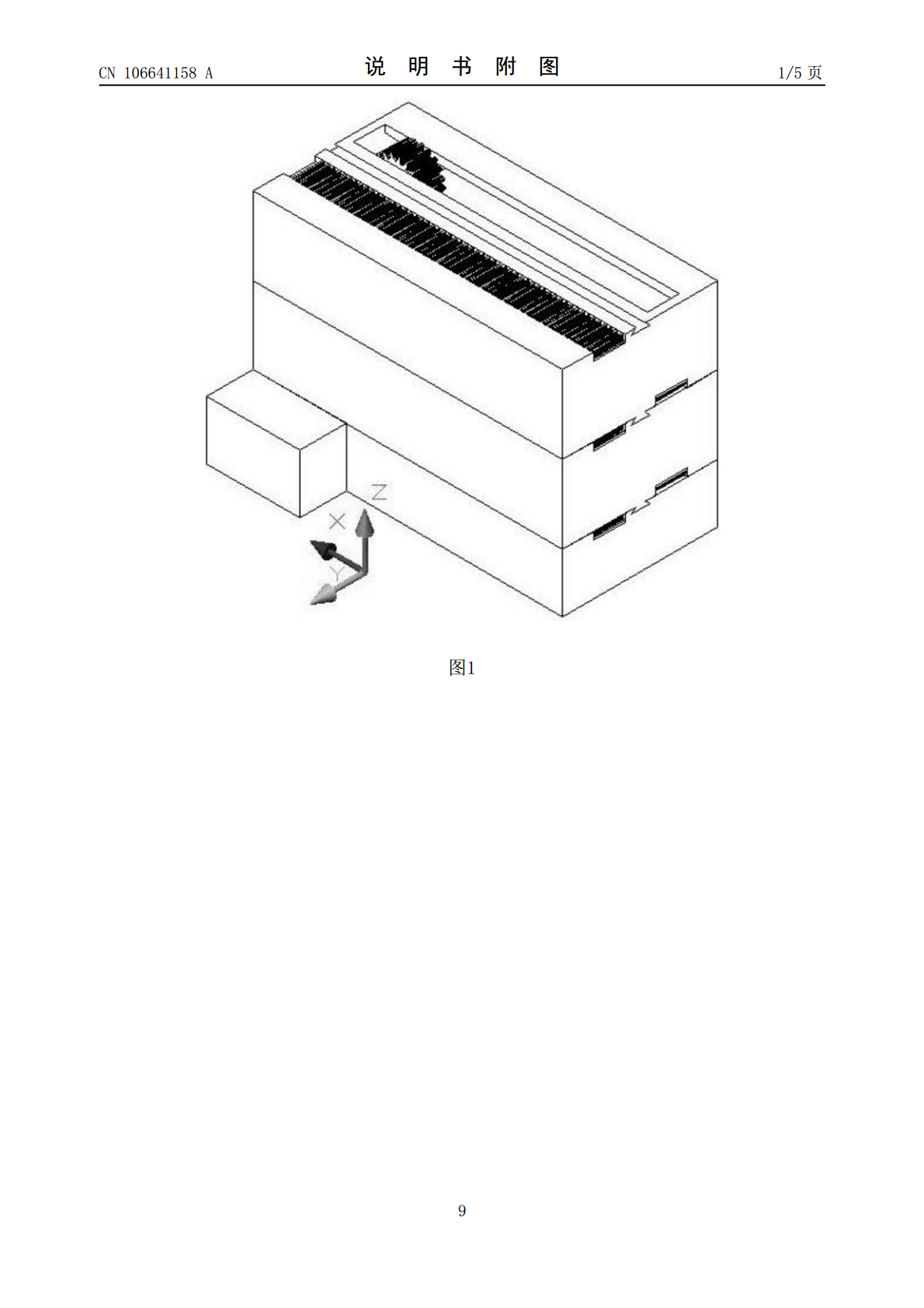
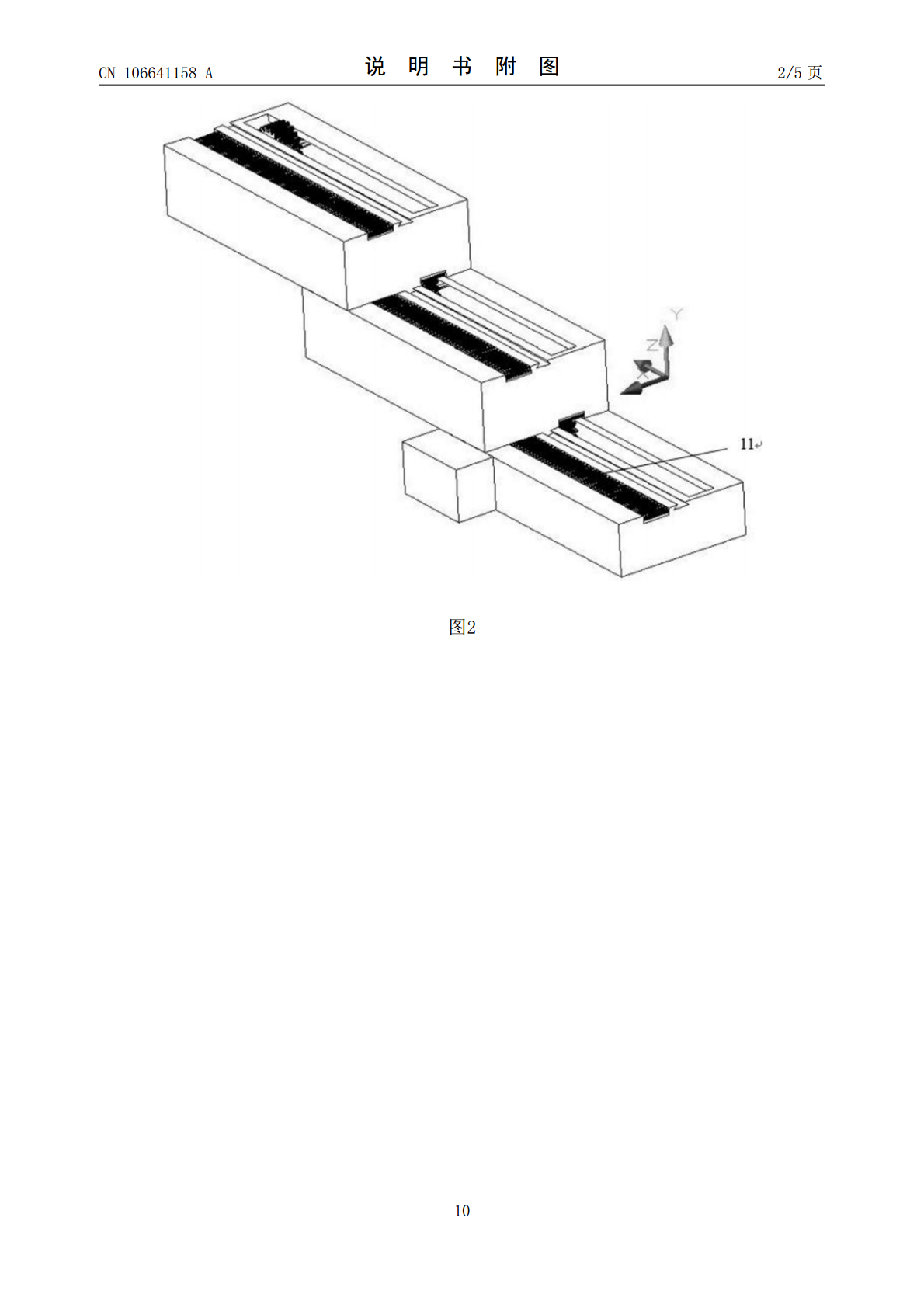
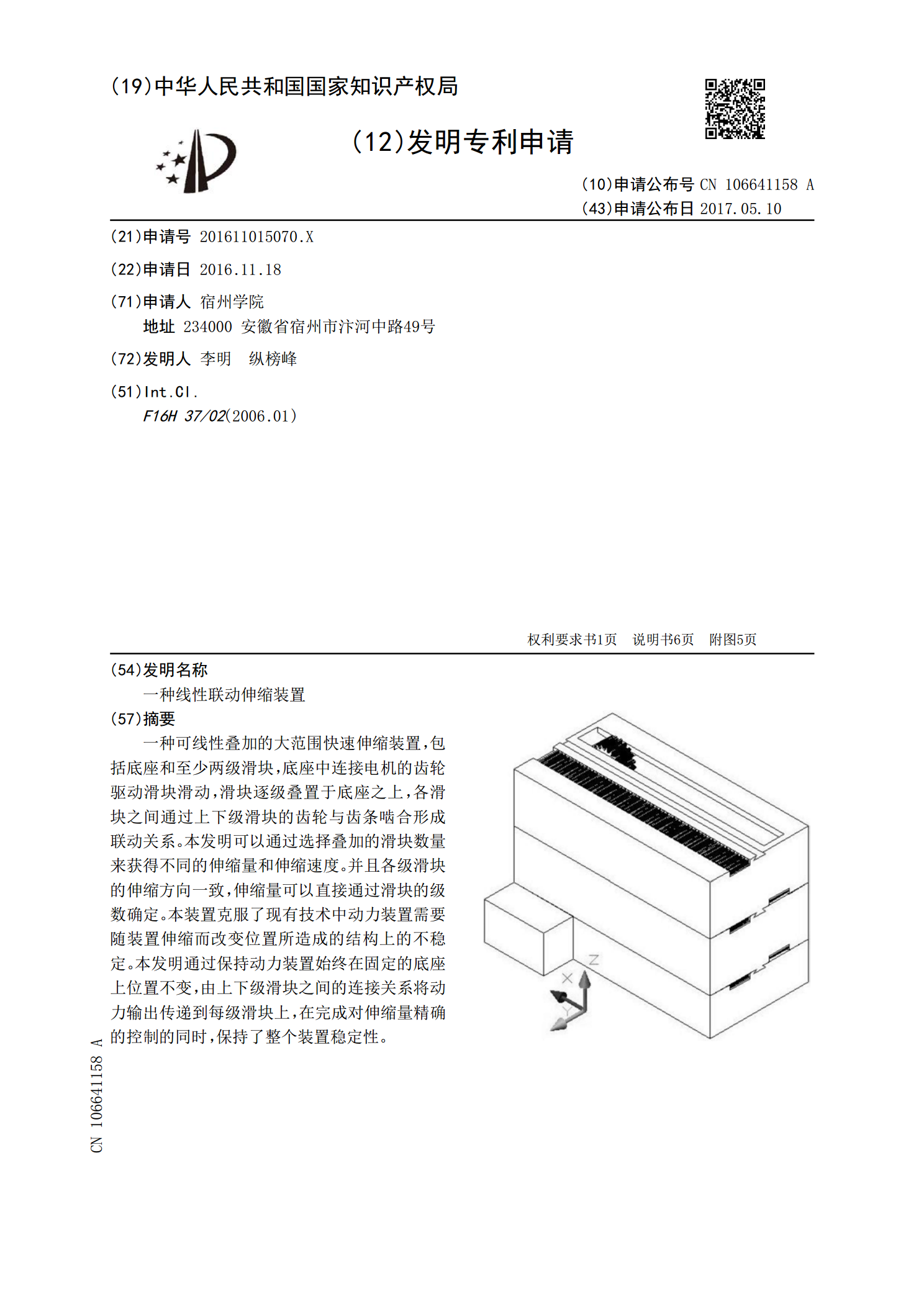
一种可线性叠加的大范围快速伸缩装置,包括底座和至少两级滑块,底座中连接电机的齿轮驱动滑块滑动,滑块逐级叠置于底座之上,各滑块之间通过上下级滑块的齿轮与齿条啮合形成联动关系。本发明可以通过选择叠加的滑块数量来获得不同的伸缩量和伸缩速度。并且各级滑块的伸缩方向一致,伸缩量可以直接通过滑块的级数确定。本装置克服了现有技术中动力装置需要随装置伸缩而改变位置所造成的结构上的不稳定。本发明通过保持动力装置始终在固定的底座上位置不变,由上下级滑块之间的连接关系将动力输出传递到每级滑块上,在完成对伸缩量精确的控制的同时,

一种伸缩管联动装置.pdf
本发明公开了一种伸缩管联动装置,属于电动伸缩管,解决了现有技术中传动的稳定性、结构的可靠性以及轴向承重能力较差的问题,解决该问题的技术方案主要包括第一联动组件和第二联动组件,第一联动组件包括相互啮合的第一螺杆和第一螺母,第一螺杆的前端与驱动装置连接,第一螺母与中管固定连接,驱动装置驱动第一螺杆相对第一螺母转动使外管相对中管轴向运动,第二联动组件包括相互啮合的第二螺杆和第二螺母,第二螺杆与第一螺杆同步转动,第二螺杆相对中管轴向定位,第二螺母与内管固定连接,第二螺杆跟随第一螺杆相对第二螺母转动使中管相对内管轴
一种多节伸缩装置、联动升降装置及工装平台.pdf
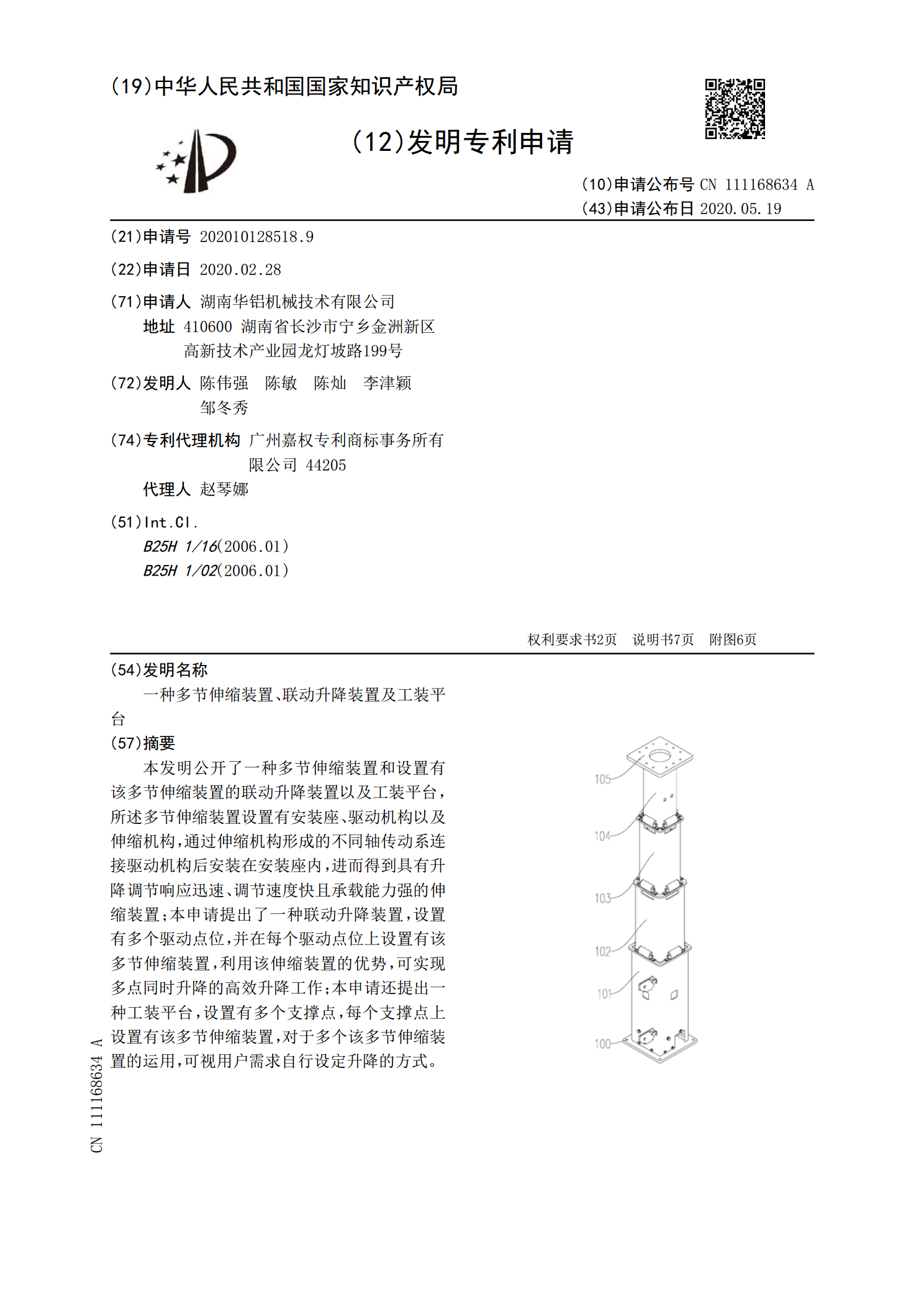
本发明公开了一种多节伸缩装置和设置有该多节伸缩装置的联动升降装置以及工装平台,所述多节伸缩装置设置有安装座、驱动机构以及伸缩机构,通过伸缩机构形成的不同轴传动系连接驱动机构后安装在安装座内,进而得到具有升降调节响应迅速、调节速度快且承载能力强的伸缩装置;本申请提出了一种联动升降装置,设置有多个驱动点位,并在每个驱动点位上设置有该多节伸缩装置,利用该伸缩装置的优势,可实现多点同时升降的高效升降工作;本申请还提出一种工装平台,设置有多个支撑点,每个支撑点上设置有该多节伸缩装置,对于多个该多节伸缩装置的运用,可
一种联动多级伸缩式胚体接取装置.pdf
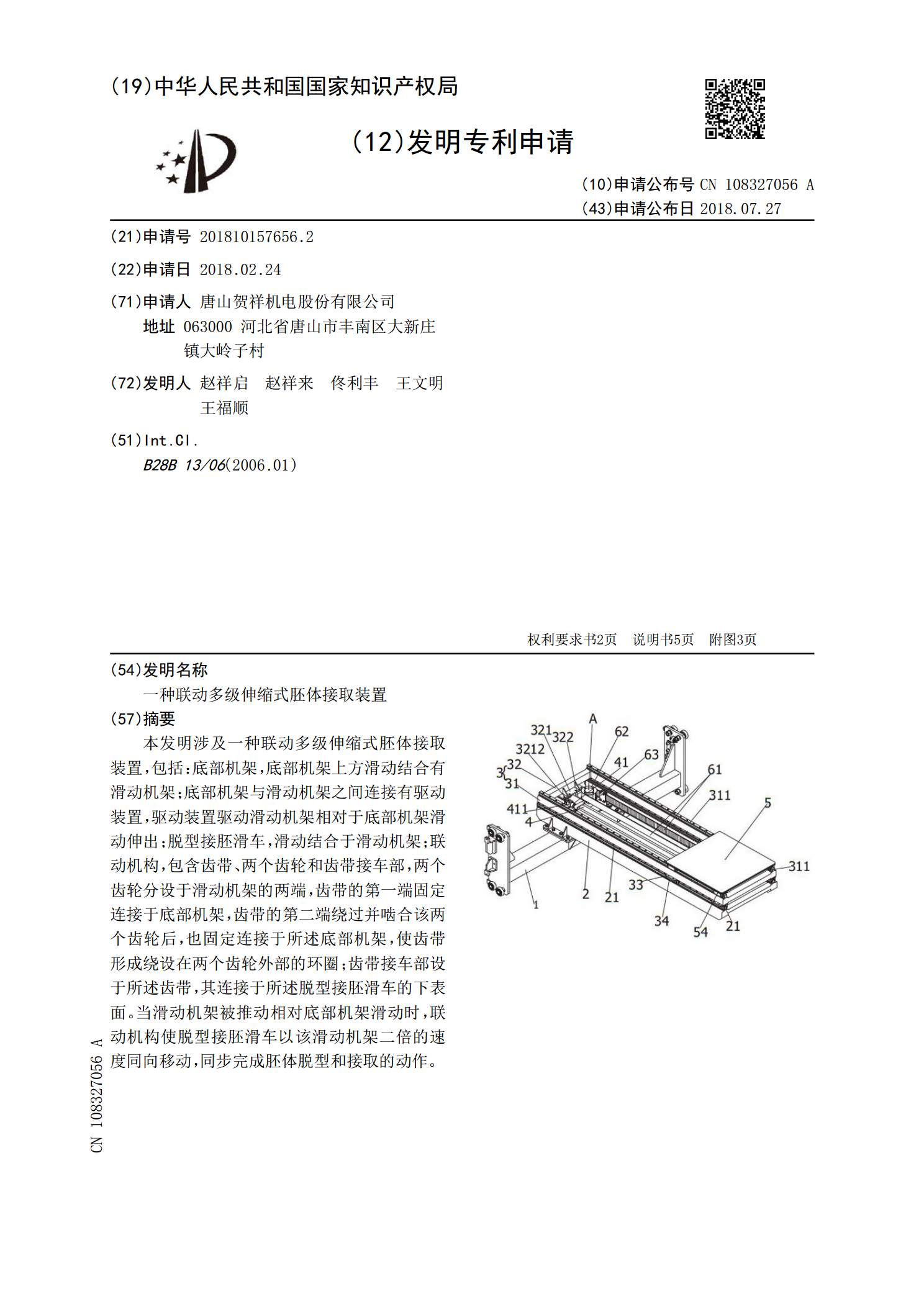
本发明涉及一种联动多级伸缩式胚体接取装置,包括:底部机架,底部机架上方滑动结合有滑动机架;底部机架与滑动机架之间连接有驱动装置,驱动装置驱动滑动机架相对于底部机架滑动伸出;脱型接胚滑车,滑动结合于滑动机架;联动机构,包含齿带、两个齿轮和齿带接车部,两个齿轮分设于滑动机架的两端,齿带的第一端固定连接于底部机架,齿带的第二端绕过并啮合该两个齿轮后,也固定连接于所述底部机架,使齿带形成绕设在两个齿轮外部的环圈;齿带接车部设于所述齿带,其连接于所述脱型接胚滑车的下表面。当滑动机架被推动相对底部机架滑动时,联动机构
线性运动伸缩装置、维护装置及图像形成装置.pdf
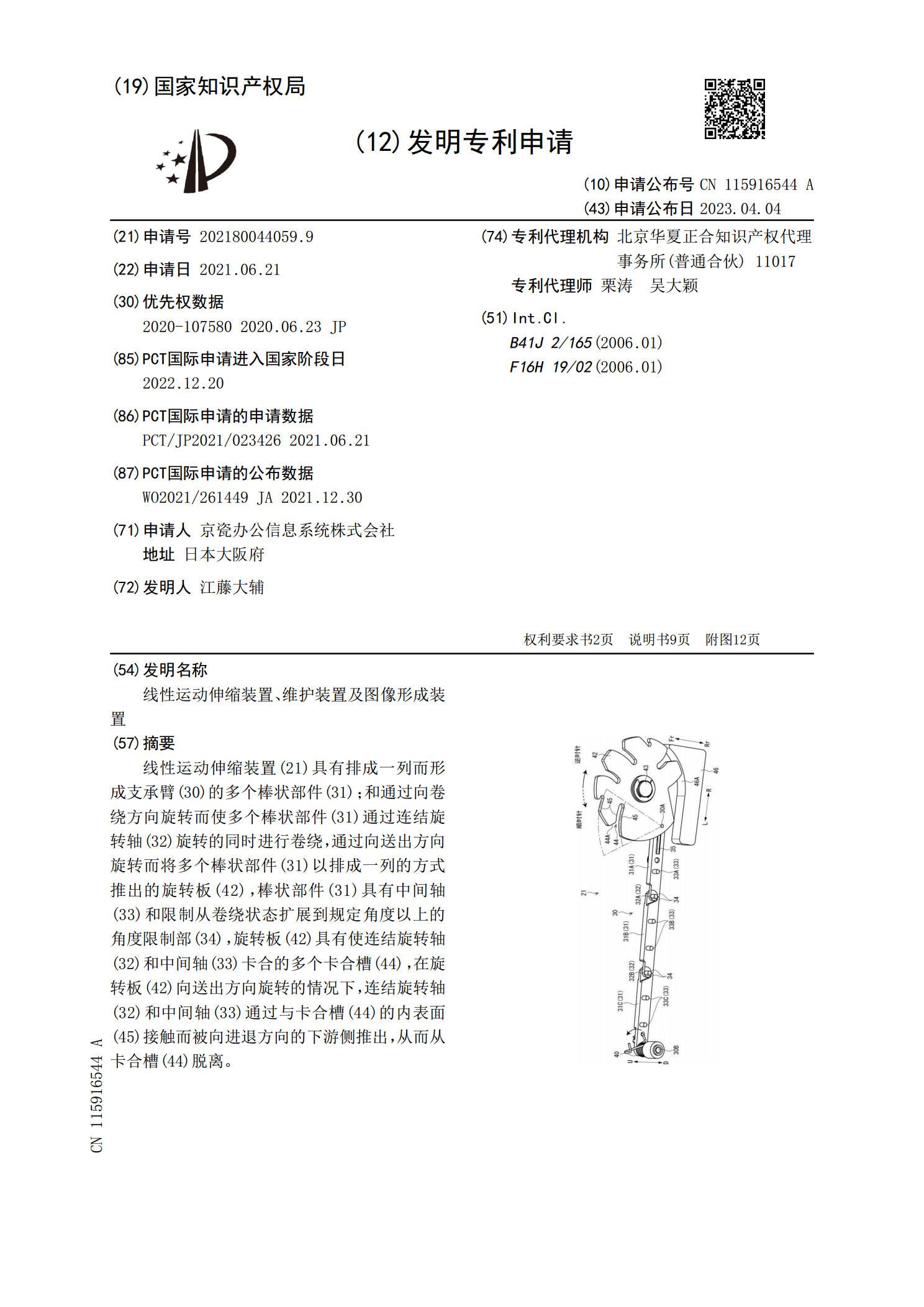
线性运动伸缩装置(21)具有排成一列而形成支承臂(30)的多个棒状部件(31);和通过向卷绕方向旋转而使多个棒状部件(31)通过连结旋转轴(32)旋转的同时进行卷绕,通过向送出方向旋转而将多个棒状部件(31)以排成一列的方式推出的旋转板(42),棒状部件(31)具有中间轴(33)和限制从卷绕状态扩展到规定角度以上的角度限制部(34),旋转板(42)具有使连结旋转轴(32)和中间轴(33)卡合的多个卡合槽(44),在旋转板(42)向送出方向旋转的情况下,连结旋转轴(32)和中间轴(33)通过与卡合槽(44)