
海底生物采收系统.pdf

是丹****ni

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

海底生物采收系统.pdf
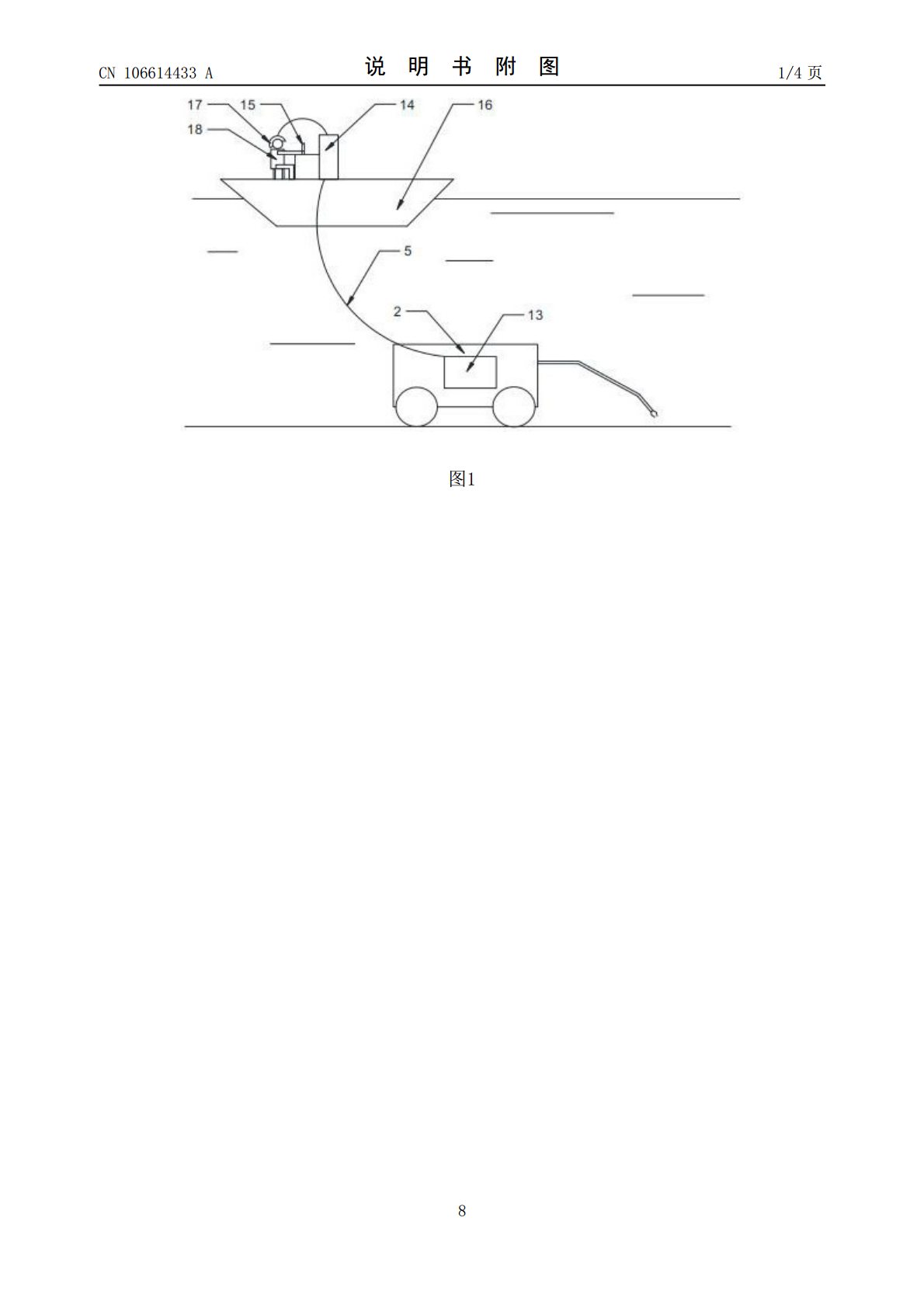
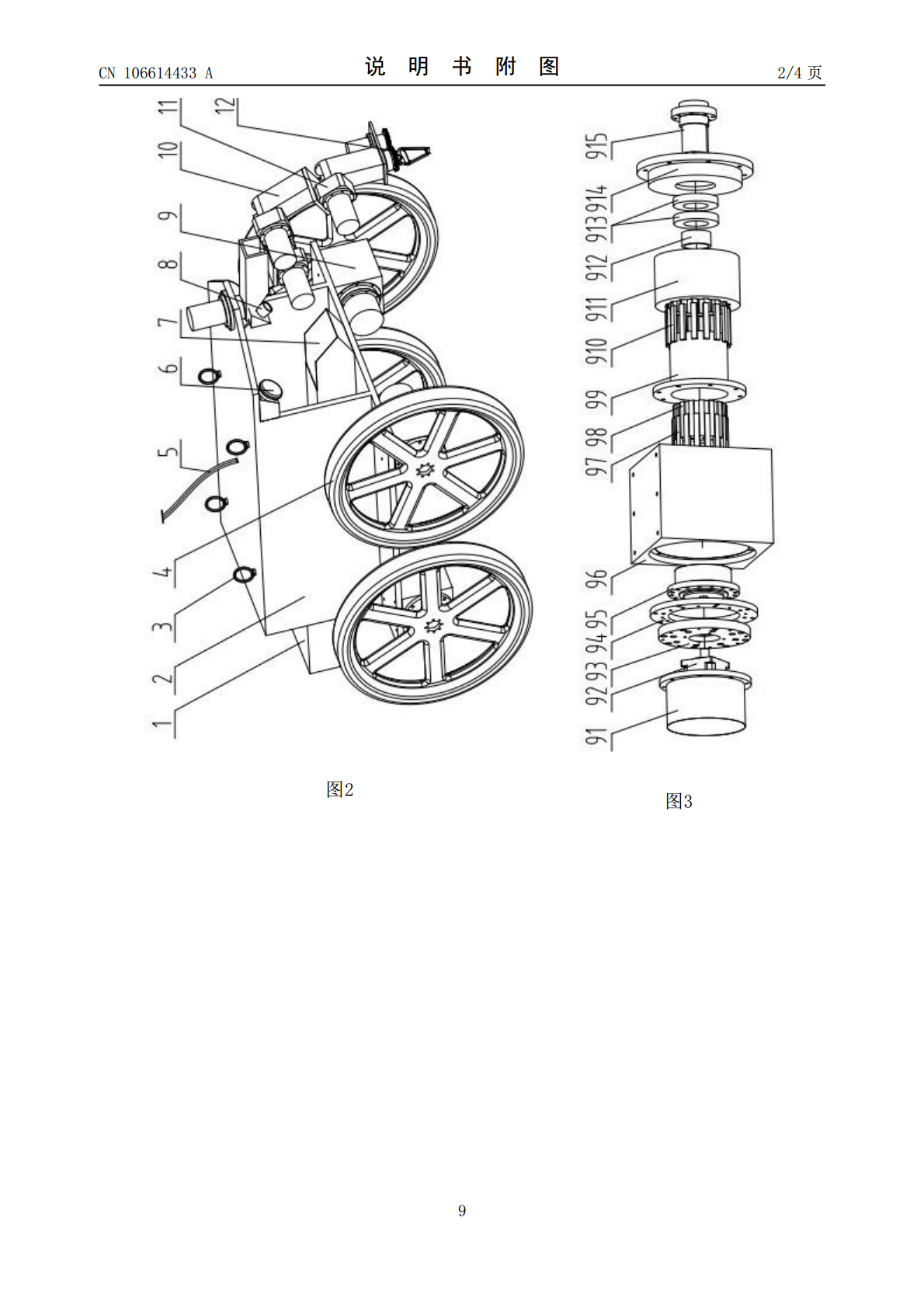
本发明公开了一种海底生物采收系统,包括海底采收机器人和操控装置;所述海底采收机器人包括车体、防水磁耦合驱动器、多轴机械臂、关节驱动轴、采收夹爪、射灯、输送道、收纳箱、吊环和数个车轮;所述操控装置包括车体控制器、操控控制器和操控器。本发明采收作业时,位于作业船上的操作人员操纵操控器,操控器将操作人员的肢体动作转化为动作指令电信号给操控控制器,操控控制器对信号进行编码操作以后通过线缆或无线电发送给车体控制器,车体控制器将信号解码后,对车轮、关节驱动轴和采收夹爪上的各个电机进行运动控制,实现车体的移动以进行海洋

采收系统及采收方法.pdf
本发明提供一种采收系统,通过管道组将注水装置、注气装置、控制装置和采收装置连接,采收系统中第一管道与油管既构成注水通道又构成采油通道,第二管道与油管构成注气通道。第一管道上沿水流动的方向依次设置有第一过滤器、第一节流器、第一计量器,第二管道上沿气体流动的方向依次设置有第二过滤器、第二计量器、单向阀、第二节流器。本发明的采收系统,节约了生产成本,提高了管道利用率。本发明还提供一种采收方法,通过打开和关闭控制装置中的阀门组以及第一管道T型端的第一阀门和第五阀门切换作业流程,解决了现有技术中恢复油井能量的装置单

一种牵引式浆果采收机、采收方法、及采收系统.pdf
本发明涉及浆果采收装置技术领域,具体涉及一种牵引式浆果采收机、采收方法、及采收系统;牵引式浆果采收机,包括:框架,框架为门式结构,框架的底部设有行走机构;输送机构,设于框架上,输送机构包括位于框架内的两个中部输送机和设于框架两侧的侧输送机;扶苗机构,设于中部输送机构的一端;支撑结构,具有两个,且错位设置,中部输送机设于支撑结构上,支撑结构与框架倾斜设置,且支撑结构上设有震动机构;牵引机构,设于框架的一端部,牵引机构包括牵引架和固定架、以及液压油泵,牵引架与框架连接,固定架与牵引架连接;该牵引式浆果采收机的

一种牵引式气力蓝莓采收系统及应用该系统的采收机.pdf
本发明属于农业机械技术领域,涉及一种牵引式气力蓝莓采收系统及应用该系统的采收机,是针对现有蓝莓采收过程中对植株损伤大所提出的,采收系统包括至少一个采摘装置,采摘装置包括龙门框架、高压喷嘴、可伸缩接果板和接果槽,龙门框架的下部开口空间形成采摘区,可伸缩接果板安装在采摘区内,可伸缩接果板滑动安装在龙门框架下部两侧的水平底板上,两侧的可伸缩接果板呈“八”字形设置;高压喷嘴内嵌在龙门框架的内壁上,且出气口朝采摘区方向设置,在采摘区内的水平底板上开设有漏果孔,在龙门框架的水平底板下面安装有与漏果孔对应的接果槽;当采

强化油采收的系统和方法.pdf
公开了一种产油和/或气的系统,所述系统包括:从地下地层采收油和/或气的机构,其中所述油和/或气包括天然气;将至少一部分来自所采收的油和/或气的天然气转化为强化油采收溶剂制剂的机构;和将至少一部分强化油采收溶剂制剂释放入地层的机构。