
一种用于辅助微创外科手术的机器人主动支架.pdf

书生****66

1/8

2/8

3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于辅助微创外科手术的机器人主动支架.pdf
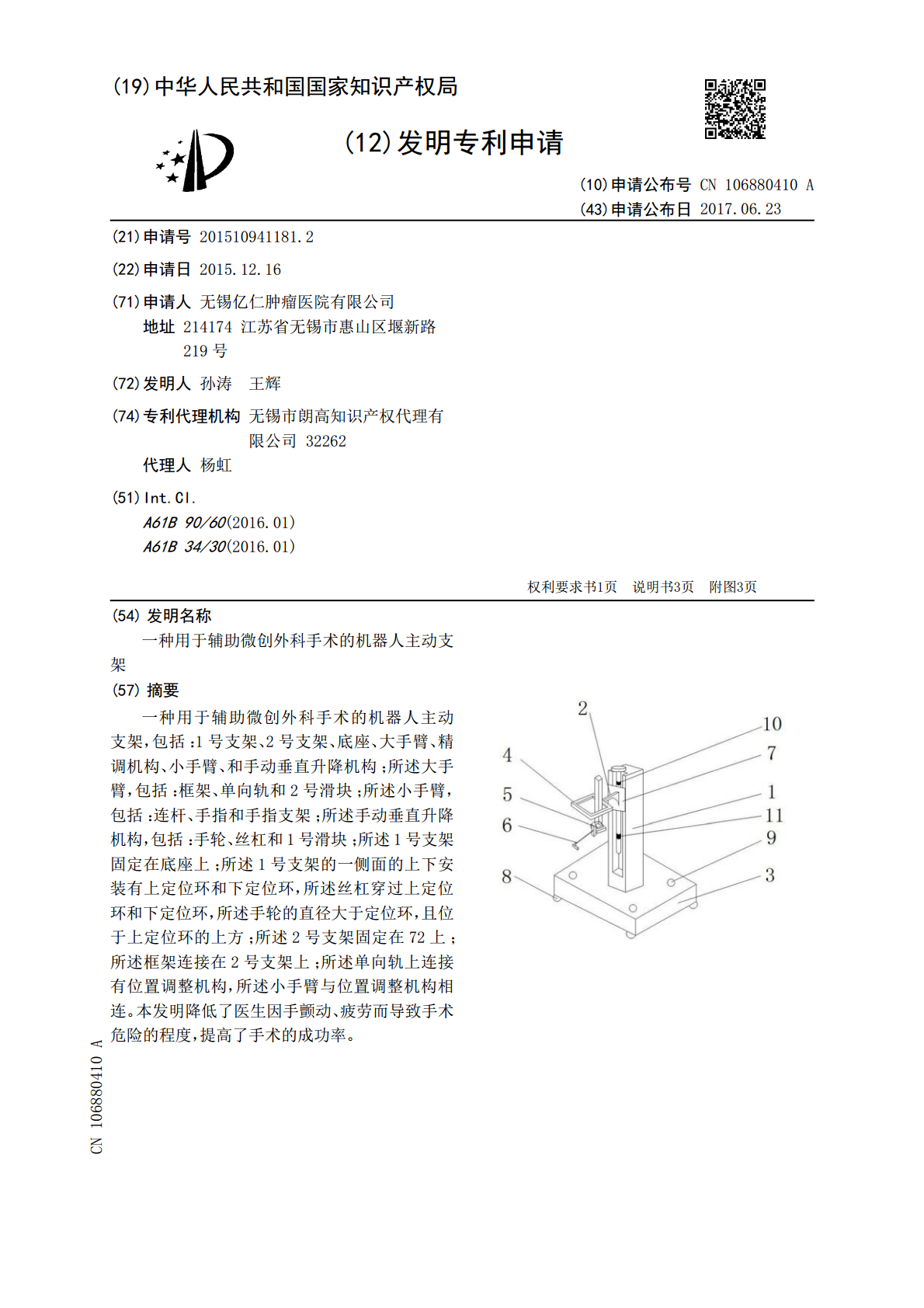
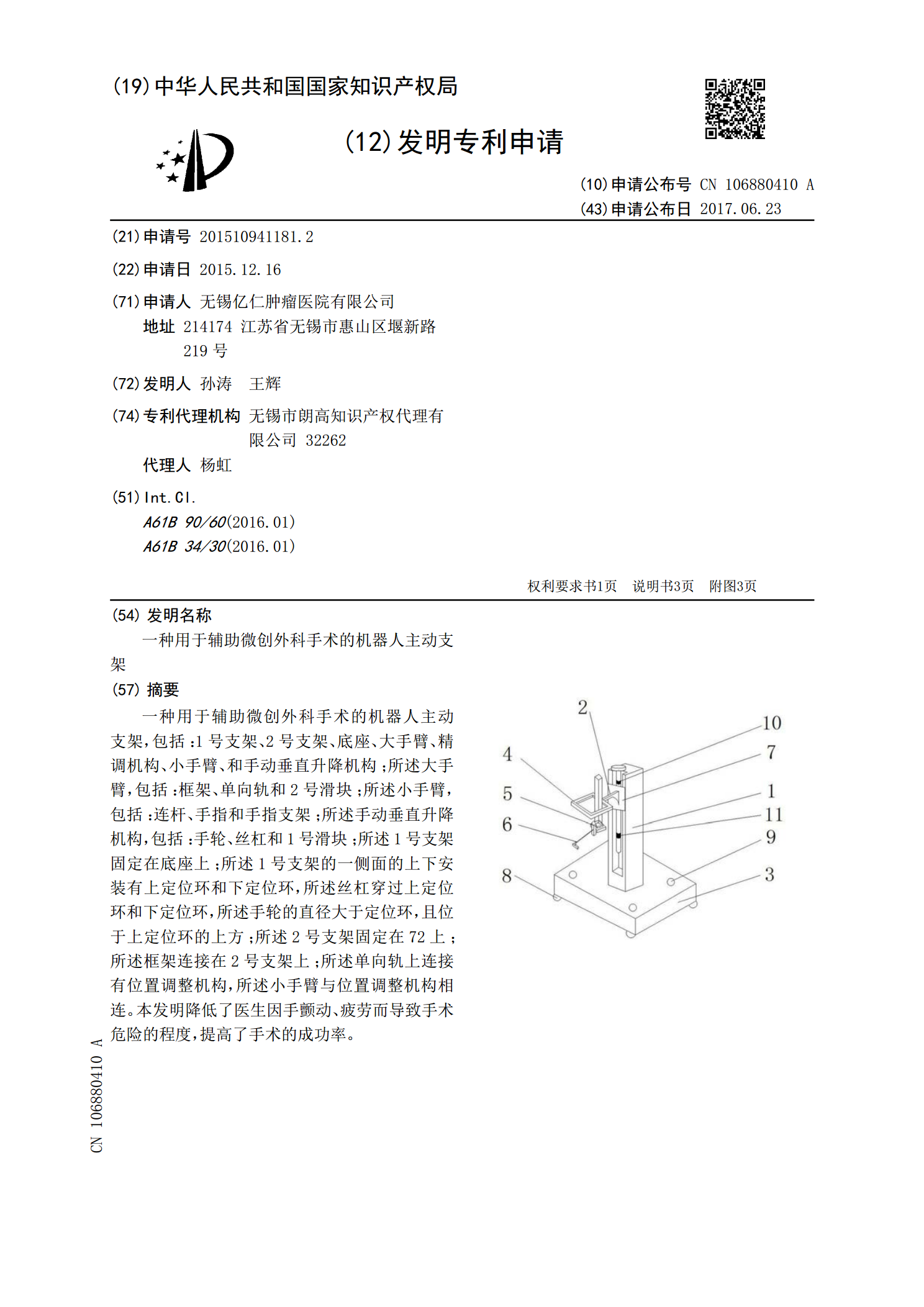
一种用于辅助微创外科手术的机器人主动支架,包括:1号支架、2号支架、底座、大手臂、精调机构、小手臂、和手动垂直升降机构;所述大手臂,包括:框架、单向轨和2号滑块;所述小手臂,包括:连杆、手指和手指支架;所述手动垂直升降机构,包括:手轮、丝杠和1号滑块;所述1号支架固定在底座上;所述1号支架的一侧面的上下安装有上定位环和下定位环,所述丝杠穿过上定位环和下定位环,所述手轮的直径大于定位环,且位于上定位环的上方;所述2号支架固定在72上;所述框架连接在2号支架上;所述单向轨上连接有位置调整机构,所述小手臂与位置

应用于机器人辅助微创外科手术的术前规划方法.docx
应用于机器人辅助微创外科手术的术前规划方法Title:SurgicalPlanningMethodsforRobot-AssistedMinimallyInvasiveSurgeryIntroduction:Robot-assistedminimallyinvasivesurgery(RAMIS)hasbecomeincreasinglyprevalentinrecentyears,enablingsurgeonstoperformcomplexprocedureswithenhancedprecisio

一种机器人辅助微创外科手术用器械.pdf
本发明公开了一种机器人辅助微创外科手术器械,它包括顺次相连的驱动装置、连接导管和末端执行装置,驱动装置包括基座,在基座上通过轴承转动安装有三个传动轴,在每一传动轴上均固定套装有丝轮和抱紧块;末端执行装置包括固定在连接导管的前端的钳座以及由左开合钳体和右开合钳体组成的开合钳,与左、右开合钳体相连的丝轮以及左、右开合钳体转动的安装在钳座上的销轴上;连接导管以及左、右开合钳体分别与丝传动系统相连。本发明结构紧凑、重量轻,提高了器械的快换效率,传动精度高。
一种用于微创外科手术机器人手术器械.pdf
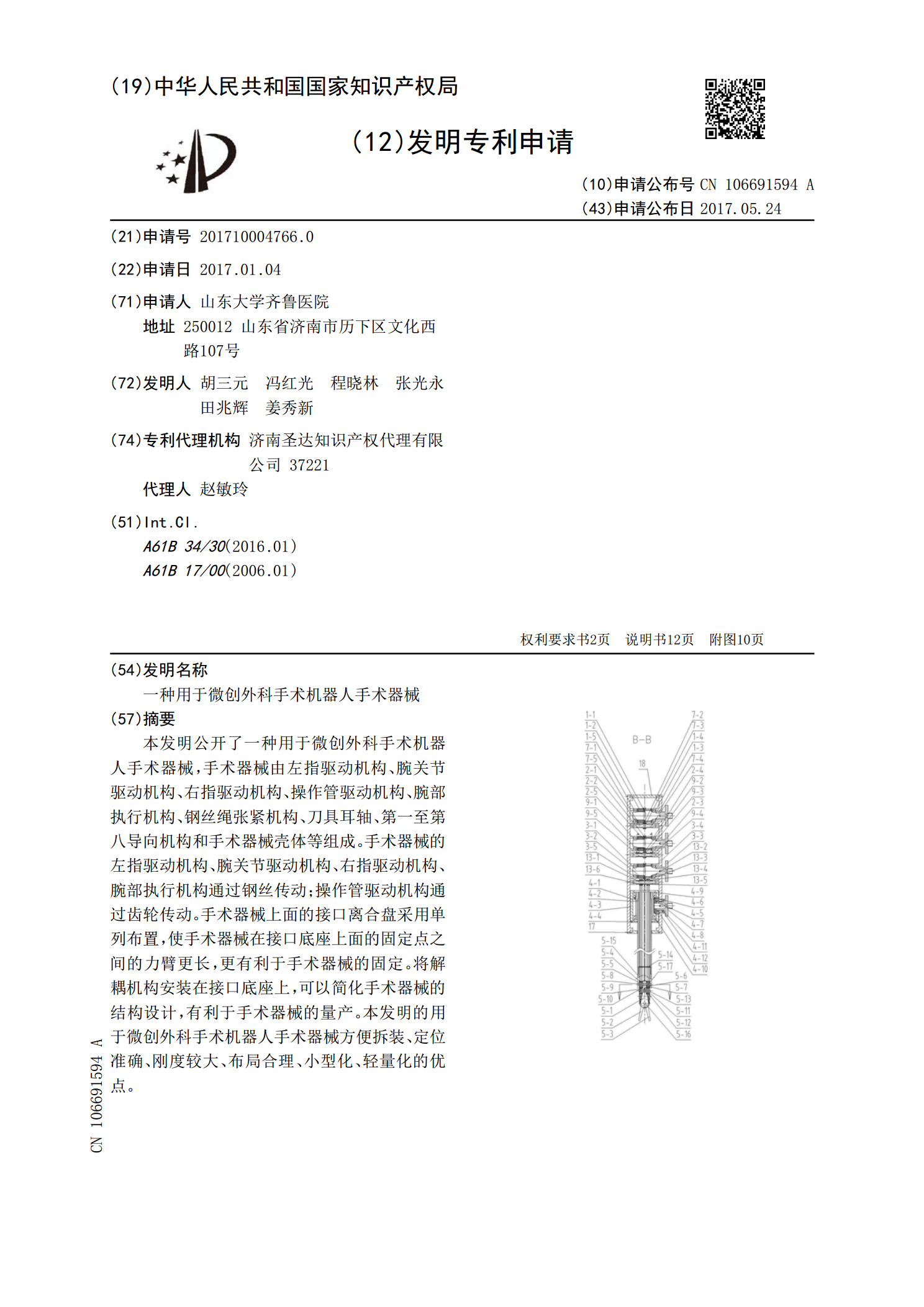
本发明公开了一种用于微创外科手术机器人手术器械,手术器械由左指驱动机构、腕关节驱动机构、右指驱动机构、操作管驱动机构、腕部执行机构、钢丝绳张紧机构、刀具耳轴、第一至第八导向机构和手术器械壳体等组成。手术器械的左指驱动机构、腕关节驱动机构、右指驱动机构、腕部执行机构通过钢丝传动;操作管驱动机构通过齿轮传动。手术器械上面的接口离合盘采用单列布置,使手术器械在接口底座上面的固定点之间的力臂更长,更有利于手术器械的固定。将解耦机构安装在接口底座上,可以简化手术器械的结构设计,有利于手术器械的量产。本发明的用于微创
MRI导航的机器人辅助微创外科手术系统设计.pdf
机器人技术机械工程师!""#$%!"#导航的机器人辅助微创外科手术系统设计邵兵,孙立宁,杜志江,富历新(哈尔滨工业大学机器人研究所,黑龙江哈尔滨!"###!)摘要:机器人辅助微创外科手术在当前医疗外科领域中发展迅速,-磁共振成像(./0)是近年来才应用于微创外科手术的成像技术,良好的物理特性和无电离辐射等优势使其处于介入放射学领域的前沿。文中介绍了由磁共振成像导航的机器人辅助微创外科手术系统的国内外研究现状,对系统涉及的术中磁共振成像扫描机系统设计、与磁共振相容的机器人系统设计、手术器械的主动和被动示踪和