
爬楼梯智能小车及其使用方法.pdf

曦晨****22


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

爬楼梯智能小车及其使用方法.pdf
本发明涉及一种爬楼梯智能小车及其使用方法,本爬楼梯智能小车包括:前、后轮组,以及位于车体两侧用于支撑小车翻爬的侧臂机构;其中所述侧臂机构适于在翻爬时抵住下层楼梯的踏板面与上层楼梯的立面构成的直角处,且将前轮沿上层楼梯的立面抬起至上层楼梯的踏板面后,再翻转至下层楼梯的踏板面,以将后轮组从下层楼梯的踏板面沿上层楼梯的立面顶至上层楼梯的踏板面,本发明结构合理,能够快速平稳的实现爬楼梯,降低颠簸发生,并且可以适应多种楼梯结构,提高了小车爬楼梯的稳定性和智能性。
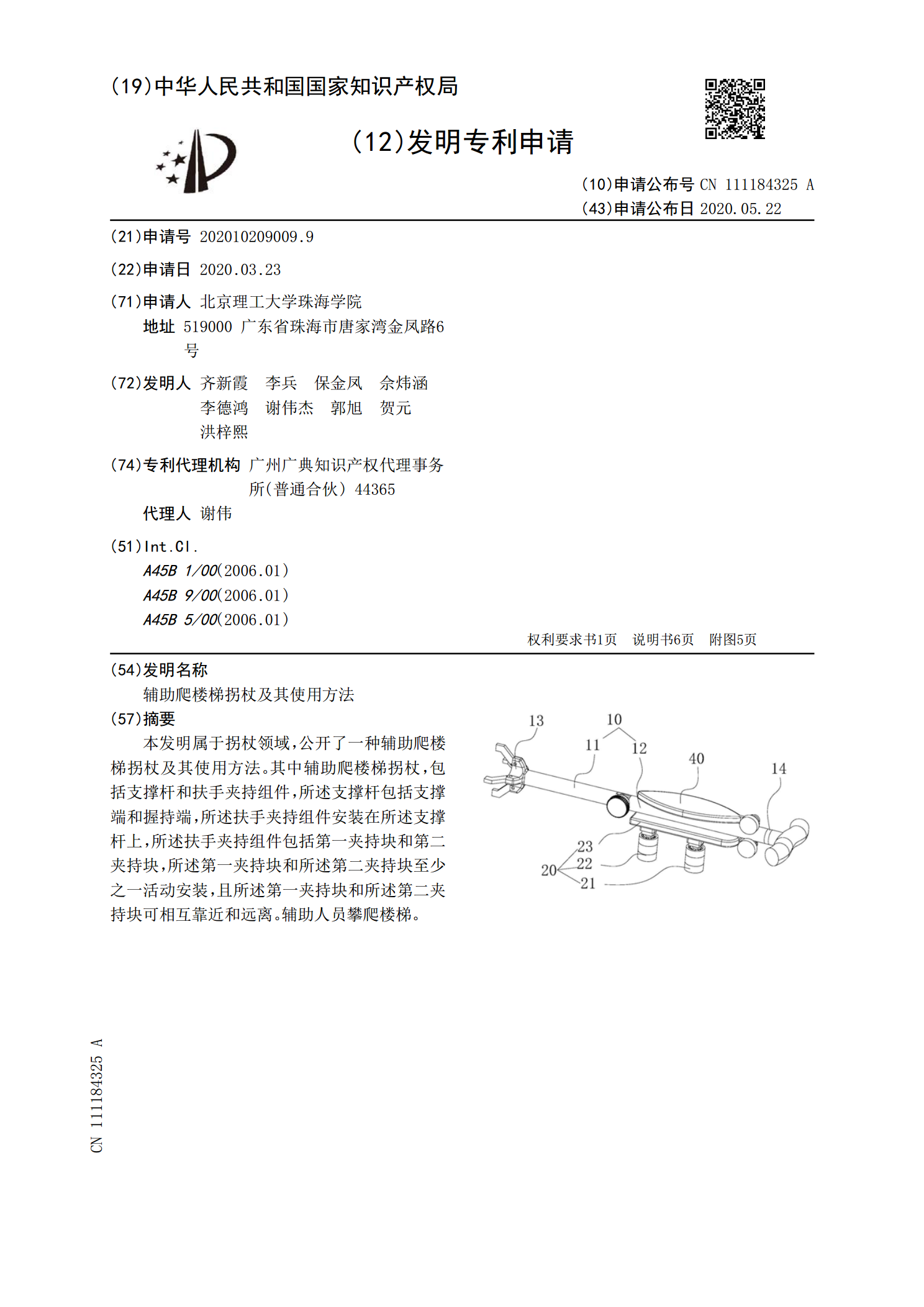
辅助爬楼梯拐杖及其使用方法.pdf
本发明属于拐杖领域,公开了一种辅助爬楼梯拐杖及其使用方法。其中辅助爬楼梯拐杖,包括支撑杆和扶手夹持组件,所述支撑杆包括支撑端和握持端,所述扶手夹持组件安装在所述支撑杆上,所述扶手夹持组件包括第一夹持块和第二夹持块,所述第一夹持块和所述第二夹持块至少之一活动安装,且所述第一夹持块和所述第二夹持块可相互靠近和远离。辅助人员攀爬楼梯。

智能小车电路及其详解.pdf
该电路由复位电路、时钟电路、边缘检测电路、障碍物检测电路、电机驱动电路、中断电路构成一、复位电路复位电路Vcc给瞬间电压时电容相当于短路,复位端为高电平有效信号,单片机复位,当电路达到稳定时,电荷通过电阻R2与大地相连,复位端恢复低电平,又可以正常工作。二、时钟电路晶振电路由10M石英晶振和C7C8组成可产生固定频率的方波三、边缘检测电路边缘检测电路设四路光电开关,用4.7K电阻和0.1uF电容组成积分电路对来自光电开关的信号进行滤波得到稳定的电平送给单片机,来控制机器人在台上动作。四、障碍物检测电路障碍

一种应用于智能物流系统的物流小车及其使用方法.pdf
本申请涉及一种应用于智能物流系统的物流小车及其使用方法,属于车间输送机系统领域,通过设置夹持升降机构、连接机构、固定支撑机构和托载加固机构,使人们可以通过操作夹持升降机构,使夹持升降机构转向后,将托载加固机构安装在夹持升降机构上,使物流小车形成叉车,进行抬升工作,夹持升降机构、连接机构、固定支撑机构和托载加固机构经过结构变换后,使AGV小车本体可以具备运输以及抬升功能,无需单独购买不同功能的物流小车,成本低。
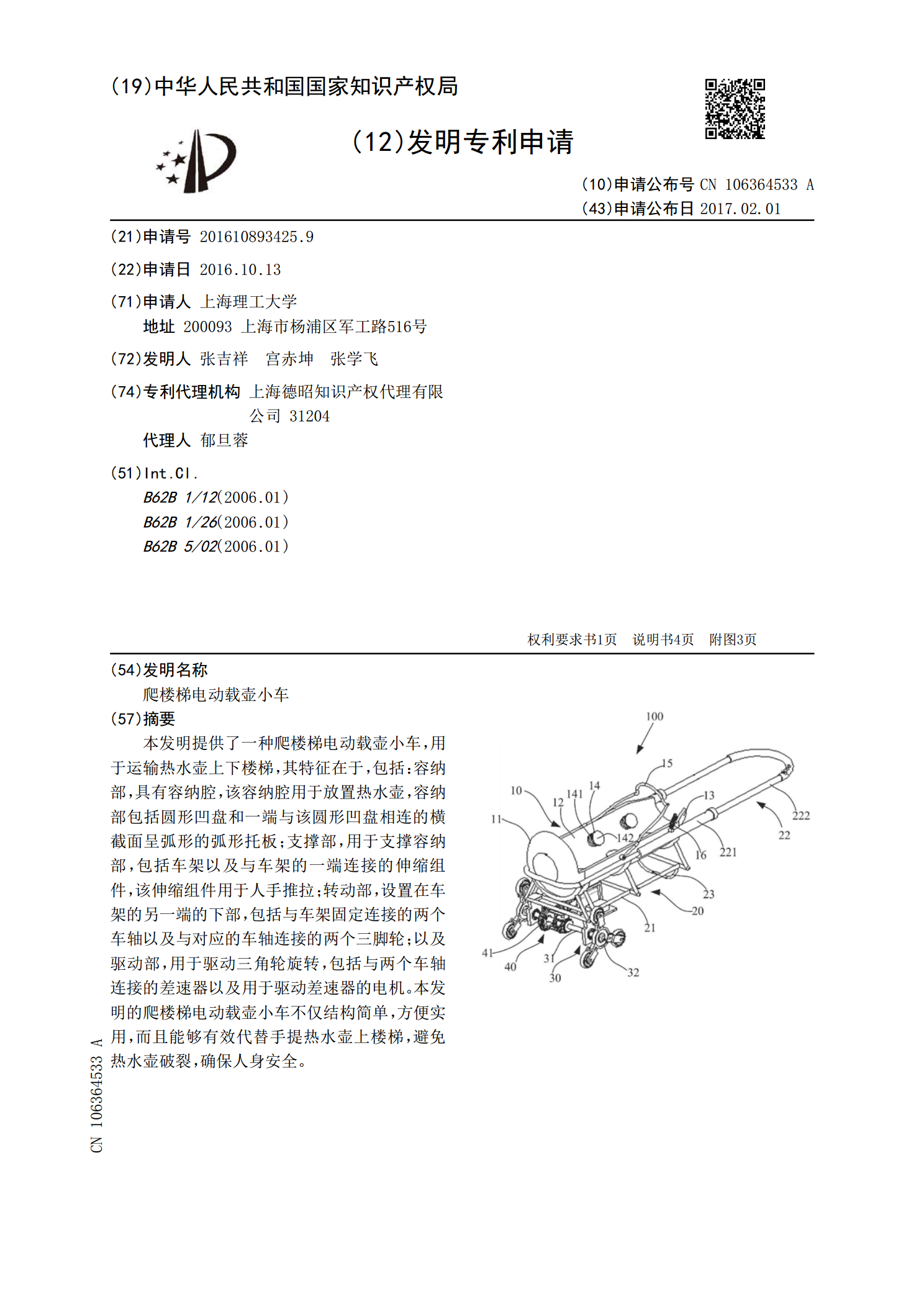
爬楼梯电动载壶小车.pdf
本发明提供了一种爬楼梯电动载壶小车,用于运输热水壶上下楼梯,其特征在于,包括:容纳部,具有容纳腔,该容纳腔用于放置热水壶,容纳部包括圆形凹盘和一端与该圆形凹盘相连的横截面呈弧形的弧形托板;支撑部,用于支撑容纳部,包括车架以及与车架的一端连接的伸缩组件,该伸缩组件用于人手推拉;转动部,设置在车架的另一端的下部,包括与车架固定连接的两个车轴以及与对应的车轴连接的两个三脚轮;以及驱动部,用于驱动三角轮旋转,包括与两个车轴连接的差速器以及用于驱动差速器的电机。本发明的爬楼梯电动载壶小车不仅结构简单,方便实用,而且