
一种天基望远镜高精度姿态确定与控制方法.pdf

书生****文章

1/6
2/6

3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种天基望远镜高精度姿态确定与控制方法.pdf
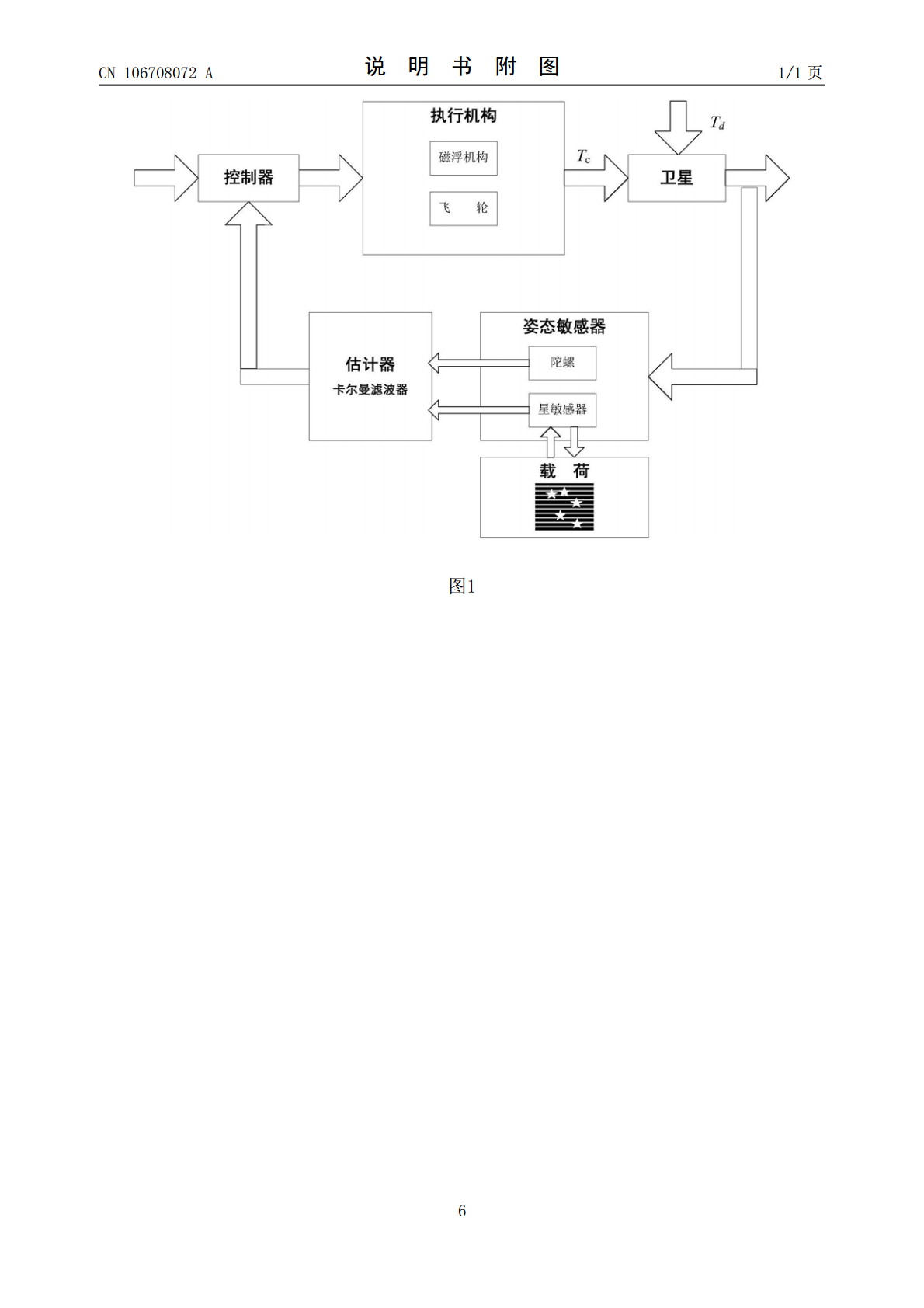
本发明涉及一种天基望远镜高精度姿态确定与控制方法,采用望远镜测光与星敏感器测量数据联合,结合陀螺测量的速度信息,实现姿态的高精度测量;姿态测量数据传递给卡尔曼滤波器,实现姿态的高精度估计;控制器给出磁浮机构、飞轮的控制律,实现姿态的高精度控制。本发明提供了能够实现天基望远镜的高精度姿态确定与控制,从而提高天基望远镜的成像质量,具有工程应用价值。

基于UKF的恒星相机高精度姿态确定方法.docx
基于UKF的恒星相机高精度姿态确定方法Title:High-precisionAttitudeDeterminationMethodbasedonUnscentedKalmanFilterforStarCamerasAbstract:Accuratedeterminationofspacecraftattitudeiscrucialforvariousmissions,includingsatellitenavigation,remotesensing,andattitudecontrol.Inrecen
一种竖井掘进机姿态确定系统及姿态确定方法.pdf
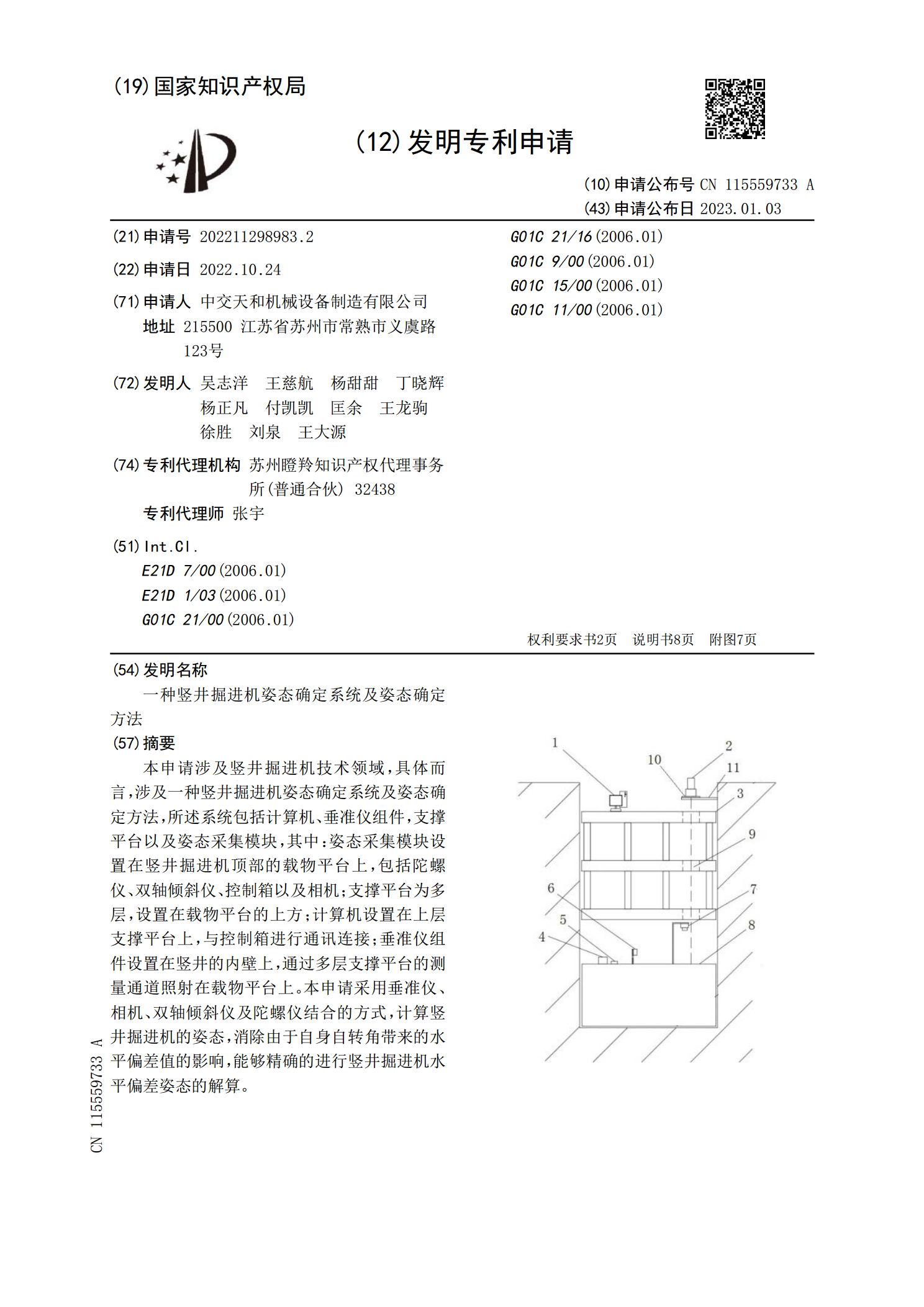
本申请涉及竖井掘进机技术领域,具体而言,涉及一种竖井掘进机姿态确定系统及姿态确定方法,所述系统包括计算机、垂准仪组件,支撑平台以及姿态采集模块,其中:姿态采集模块设置在竖井掘进机顶部的载物平台上,包括陀螺仪、双轴倾斜仪、控制箱以及相机;支撑平台为多层,设置在载物平台的上方;计算机设置在上层支撑平台上,与控制箱进行通讯连接;垂准仪组件设置在竖井的内壁上,通过多层支撑平台的测量通道照射在载物平台上。本申请采用垂准仪、相机、双轴倾斜仪及陀螺仪结合的方式,计算竖井掘进机的姿态,消除由于自身自转角带来的水平偏差值的

高精度望远镜主次镜相对位置和姿态实时测量装置及方法.pdf
本发明提供了一种高精度望远镜主次镜相对位置和姿态实时测量装置及方法,解决了望远镜在工作时次镜相对于主镜空间位置和姿态的高精度实时测量问题。该装置包括高精度激光测距仪、角锥棱镜和数据处理系统。利用激光测距仪、角锥棱镜测量望远镜次镜上六个点到望远镜主镜上对应点的六个距离量,再利用本发明提供的解算方法解算出望远镜次镜相对于主镜的偏心和倾斜等位姿变化量。本发明测量装置及方法具有结构简单、精度高、实时测量的特点。

一种深空探测器的高精度姿态容错控制方法.pdf
本发明公开了一种深空探测器的高精度姿态容错控制方法,其特征是,包括如下步骤:1)建立反作用飞轮故障以及安装偏差的数学模型;2)以姿态误差四元数理论为基础,建立深空探测器姿态控制系统模型;3)分析反作用飞轮的不确定性;4)设计快速终端滑模面;5)分析系统的总不确定性;6)设计自适应快速终端滑模控制器。本发明所达到的有益效果:本方法重新分析定义了姿控系统的干扰与执行器的效率矩阵、安装偏差矩阵以及偏差力矩,有效解决了执行器存在多种不确定性下的耦合问题;不需要地面控制台进行指令传输,能够自主实现姿态的容错控制;具