
高精度望远镜主次镜相对位置和姿态实时测量装置及方法.pdf

邻家****文章


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高精度望远镜主次镜相对位置和姿态实时测量装置及方法.pdf
本发明提供了一种高精度望远镜主次镜相对位置和姿态实时测量装置及方法,解决了望远镜在工作时次镜相对于主镜空间位置和姿态的高精度实时测量问题。该装置包括高精度激光测距仪、角锥棱镜和数据处理系统。利用激光测距仪、角锥棱镜测量望远镜次镜上六个点到望远镜主镜上对应点的六个距离量,再利用本发明提供的解算方法解算出望远镜次镜相对于主镜的偏心和倾斜等位姿变化量。本发明测量装置及方法具有结构简单、精度高、实时测量的特点。

某型机进近段高精度相对姿态实时测量技术.docx
某型机进近段高精度相对姿态实时测量技术某型机进近段高精度相对姿态实时测量技术摘要:随着航空事业的快速发展,对飞机的控制和导航技术提出了更高的要求。相对姿态实时测量技术是一项关键技术,它可以帮助飞行员在复杂的环境中精确控制飞机。本文首先介绍了相对姿态的定义和应用场景,然后探讨了目前常见的相对姿态测量方法。接着,详细讨论了某型机进近段高精度相对姿态实时测量技术的原理和实现方法,包括传感器选择、数据处理和系统设计等方面。最后,通过仿真和实验验证技术的可行性和性能。1.引言在飞机进近段,相对姿态的准确测量对于飞行
大型水下吊装结构物位置姿态实时测量装置.pdf
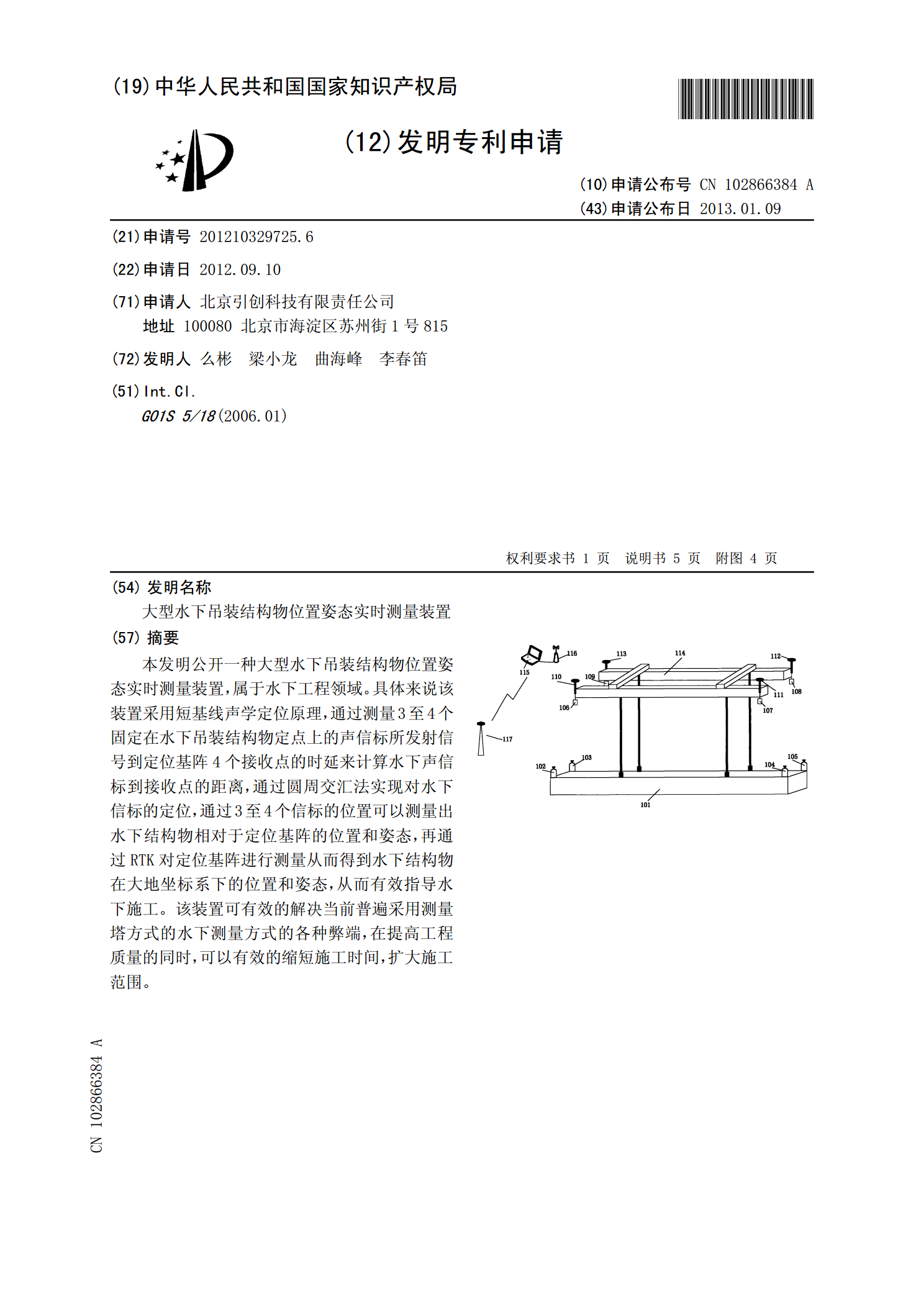
本发明公开一种大型水下吊装结构物位置姿态实时测量装置,属于水下工程领域。具体来说该装置采用短基线声学定位原理,通过测量3至4个固定在水下吊装结构物定点上的声信标所发射信号到定位基阵4个接收点的时延来计算水下声信标到接收点的距离,通过圆周交汇法实现对水下信标的定位,通过3至4个信标的位置可以测量出水下结构物相对于定位基阵的位置和姿态,再通过RTK对定位基阵进行测量从而得到水下结构物在大地坐标系下的位置和姿态,从而有效指导水下施工。该装置可有效的解决当前普遍采用测量塔方式的水下测量方式的各种弊端,在提高工程质

一种天基望远镜高精度姿态确定与控制方法.pdf
本发明涉及一种天基望远镜高精度姿态确定与控制方法,采用望远镜测光与星敏感器测量数据联合,结合陀螺测量的速度信息,实现姿态的高精度测量;姿态测量数据传递给卡尔曼滤波器,实现姿态的高精度估计;控制器给出磁浮机构、飞轮的控制律,实现姿态的高精度控制。本发明提供了能够实现天基望远镜的高精度姿态确定与控制,从而提高天基望远镜的成像质量,具有工程应用价值。

基于像散分解的望远镜主次镜对准方法.docx
基于像散分解的望远镜主次镜对准方法基于像散分解的望远镜主次镜对准方法摘要:望远镜是天文学研究中不可或缺的工具。为了保证望远镜的高精度观测,良好的主次镜对准十分关键。本文介绍了一种基于像散分解的望远镜主次镜对准方法,该方法通过分析像散产生的原因,利用精确的数学模型和实验手段实现了主次镜对准的高精度。1.引言望远镜主次镜对准是一项十分关键的工作,对望远镜的观测精度有着直接影响。望远镜主次镜对准的目标是使主次镜光轴完全保持一致,从而确保被观测物体的像在焦面上保持最佳的成像质量。传统的主次镜对准方法通常通过调整主