
一种气囊轮廓在位检测方法及装置.pdf

一吃****继勇


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种气囊轮廓在位检测方法及装置.pdf
本发明实施例提供的一种气囊轮廓在位检测方法及装置,通过气囊抛光机床、激光测微仪以及用于进行数据处理的计算设备对待测气囊的轮廓特征进行检测,以判断该待测气囊是否满足实际使用要求。与现有技术相比,本发明实施例提供的方法及装置,能够有效保证气囊轮廓质量的一致性,提高气囊抛光去除的稳定性和工艺可控性,而且可以基于检测获得的气囊轮廓特征推测实际去除函数,从而调整抛光工艺参数以改善光学元件的去除效果。
一种大口径反射镜面形轮廓在位检测方法及装置.pdf
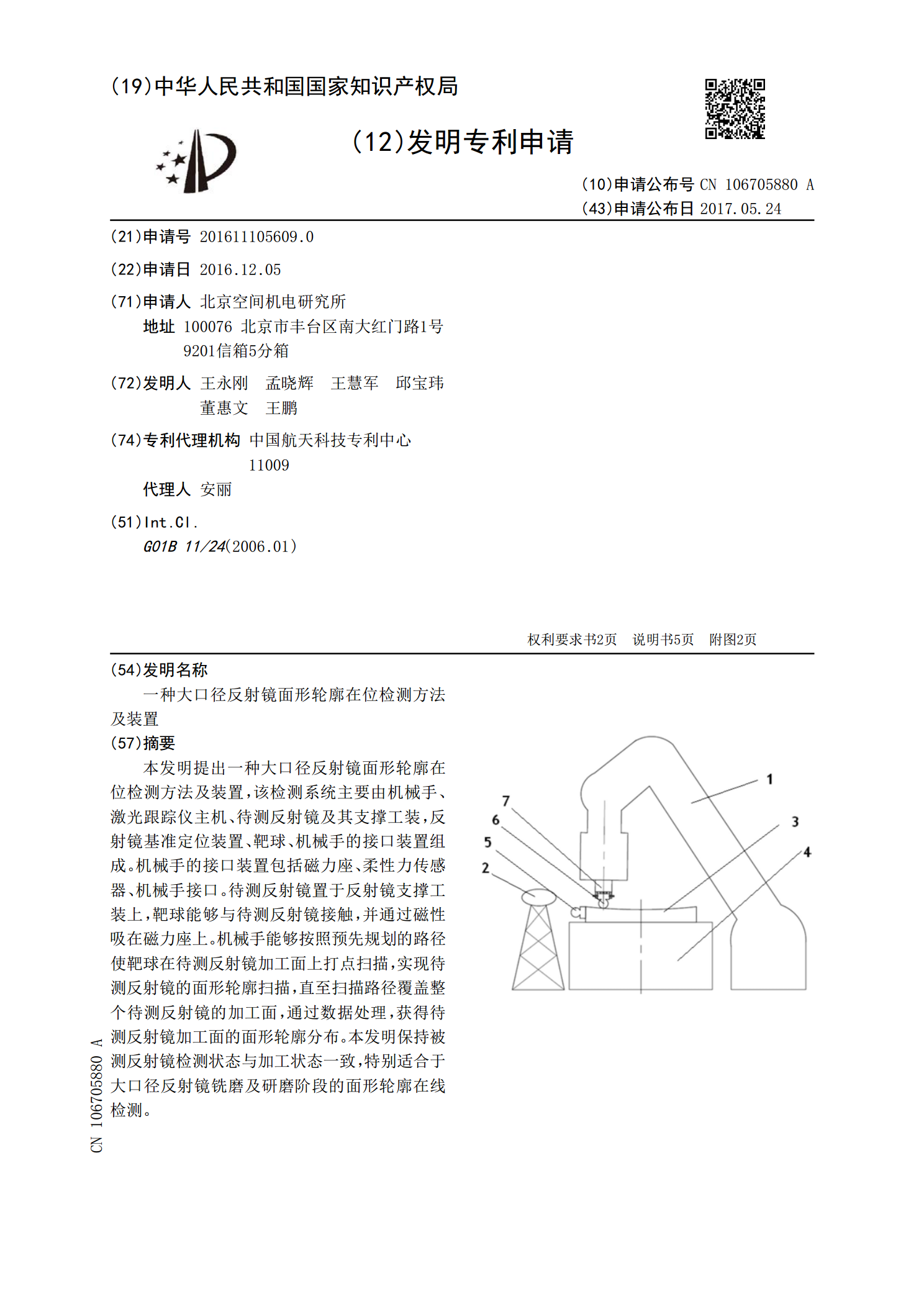
本发明提出一种大口径反射镜面形轮廓在位检测方法及装置,该检测系统主要由机械手、激光跟踪仪主机、待测反射镜及其支撑工装,反射镜基准定位装置、靶球、机械手的接口装置组成。机械手的接口装置包括磁力座、柔性力传感器、机械手接口。待测反射镜置于反射镜支撑工装上,靶球能够与待测反射镜接触,并通过磁性吸在磁力座上。机械手能够按照预先规划的路径使靶球在待测反射镜加工面上打点扫描,实现待测反射镜的面形轮廓扫描,直至扫描路径覆盖整个待测反射镜的加工面,通过数据处理,获得待测反射镜加工面的面形轮廓分布。本发明保持被测反射镜检测

一种在位式气囊抛光头的修整装置及其修整方法.pdf
本发明公开了一种在位式气囊抛光头的修整装置及其修整方法,修整装置包括在位设置的修磨装置和优化设置的机床本体运动件,气囊抛光头是球冠形的,修磨装置整体通过修磨底座与机床立柱连接,修磨底座上设置有两平行导轨,砂轮主轴设置在砂轮主轴箱内,砂轮主轴箱架设在底板上,底板通过滑块与导轨活动连接,两导轨中间设置有气缸,气缸的活塞杆末端与滑块传动连接;圆弧截面形砂轮设置在砂轮主轴输出端,修磨电机与砂轮主轴另一端传动连接,砂轮的加工面与气囊抛光头的抛光垫的表面活动靠接。利用抛光机床本身的运动实现在位修整,结构简单、成本低、

汽车安全气囊边缘轮廓检测方法.pdf
汽车安全气囊边缘轮廓检测方法,涉及汽车气囊检测领域,首先汽车安全气囊水平安放在检测平台,用一台红外CCD相机和一台图像采集器获取汽车安全气囊顶部一周的图像,对获取的图像通过图像采集器传输到计算机,计算机根据采集的数据建立汽车安全气囊的外形结构数学模型,与标准气囊模型对比匹配。本发明能够对汽车安全气囊的边缘轮廓进行高速、高精度的实时检测,既完善检测信息,又实现检测的速度和检测精度,同时,获取的图像的对比度好,抗杂光干扰能力强,在汽车安全气囊检测领域中具有很强的使用价值。
一种汽车侧气囊轮廓检测机.pdf
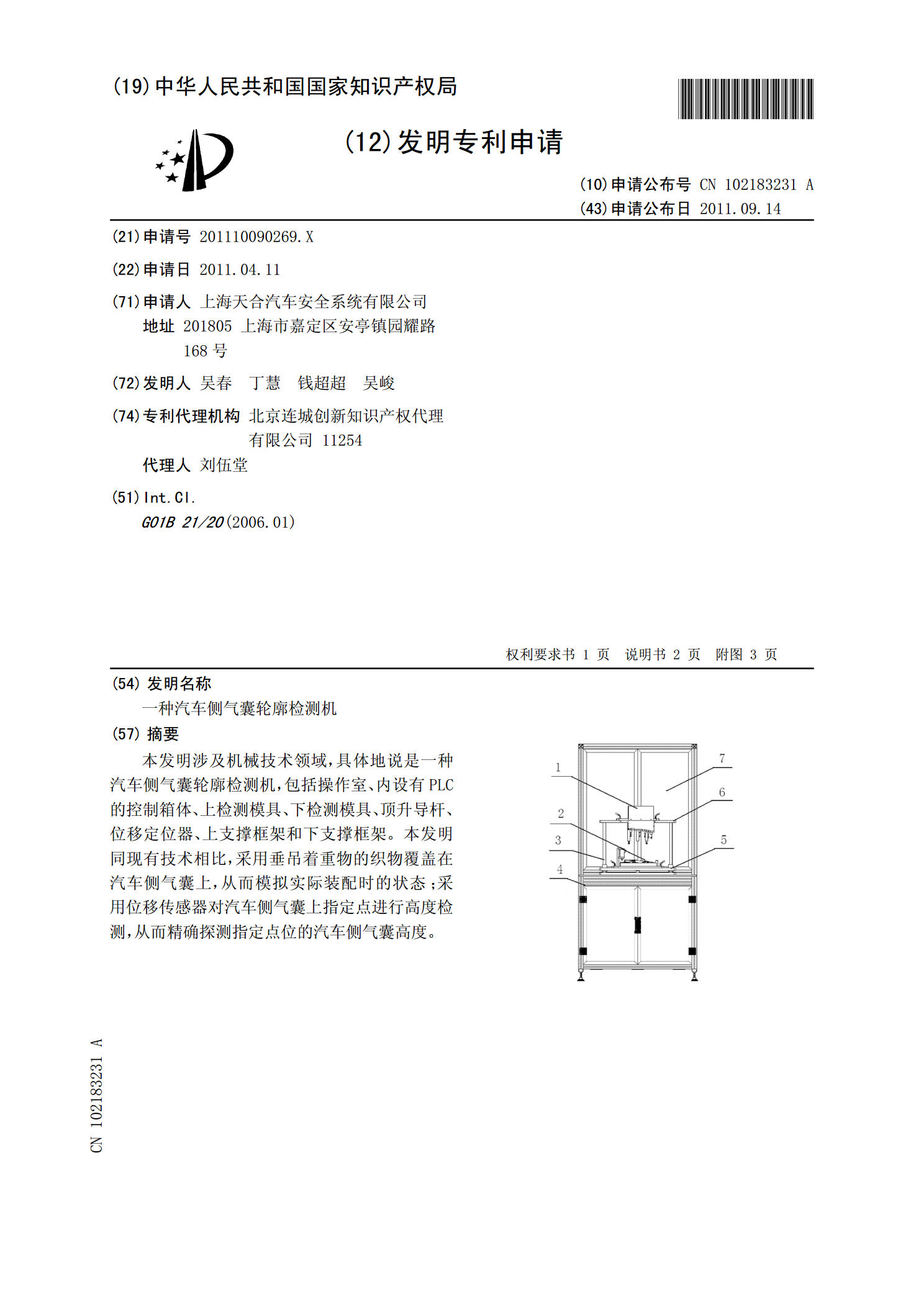
本发明涉及机械技术领域,具体地说是一种汽车侧气囊轮廓检测机,包括操作室、内设有PLC的控制箱体、上检测模具、下检测模具、顶升导杆、位移定位器、上支撑框架和下支撑框架。本发明同现有技术相比,采用垂吊着重物的织物覆盖在汽车侧气囊上,从而模拟实际装配时的状态;采用位移传感器对汽车侧气囊上指定点进行高度检测,从而精确探测指定点位的汽车侧气囊高度。