
一种方向盘转角的计算方法及装置.pdf

努力****梓颖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种方向盘转角的计算方法及装置.pdf
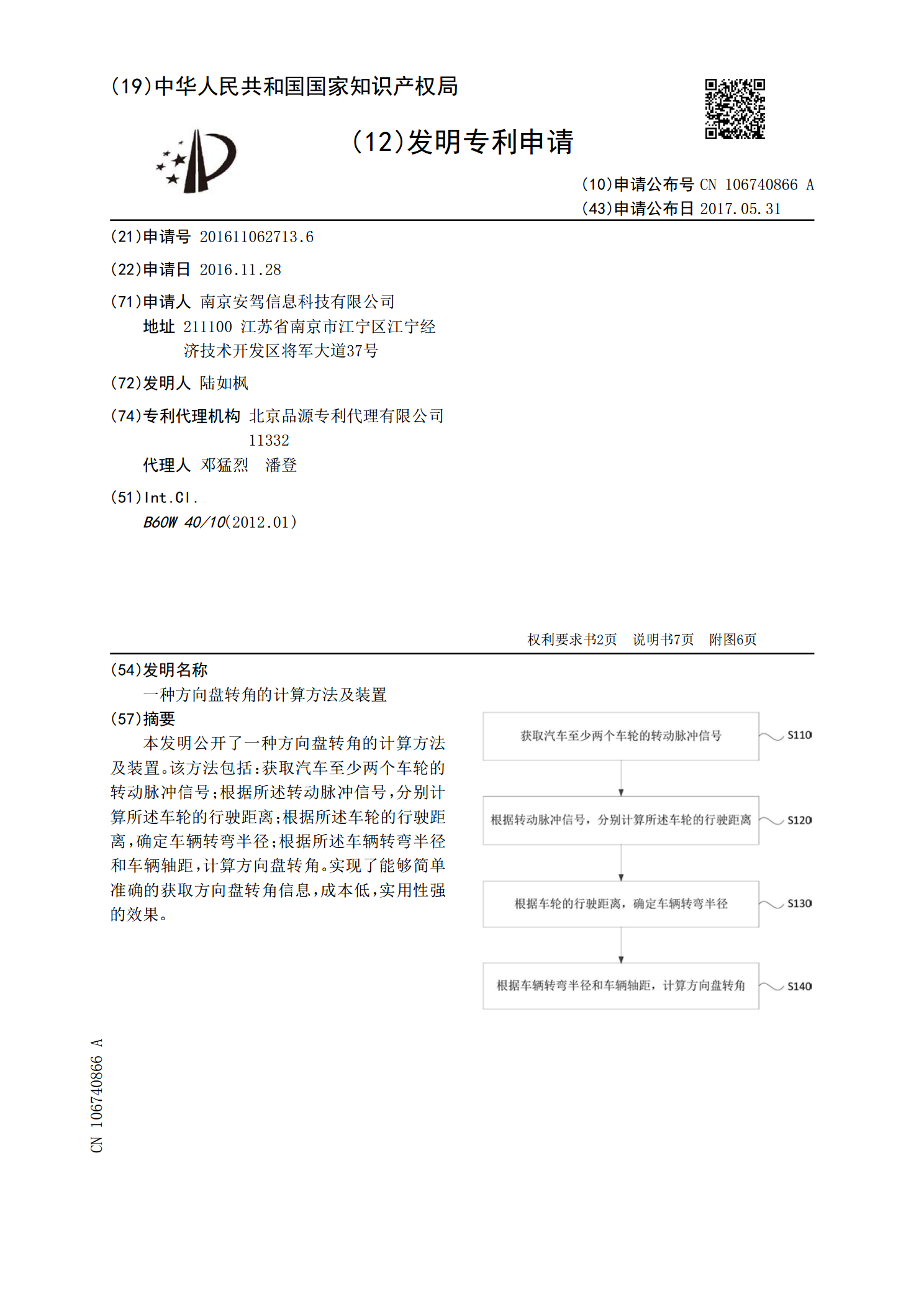
本发明公开了一种方向盘转角的计算方法及装置。该方法包括:获取汽车至少两个车轮的转动脉冲信号;根据所述转动脉冲信号,分别计算所述车轮的行驶距离;根据所述车轮的行驶距离,确定车辆转弯半径;根据所述车辆转弯半径和车辆轴距,计算方向盘转角。实现了能够简单准确的获取方向盘转角信息,成本低,实用性强的效果。

一种方向盘转角测量装置.pdf
本发明提供一种方向盘转角测量装置,属于汽车制造技术领域,其可解决现有的方向盘转角测量装置的结构复杂、成本较高,同时对精度要求很高的问题。本发明的方向盘转角测量装置包括:内齿轮副、磁体、磁感应传感器,所述内齿轮副包括:第一齿轮、第二齿轮,且第二齿轮的直径小于第一齿轮的半径;所述第二齿轮的内侧与方向盘转向轴相对固定连接;所述磁体设于第一齿轮的中心轴上,且磁体的N、S极连线方向与中心轴方向不平行;所述第一齿轮的中心轴与第一齿轮相对固定连接;所述磁感应传感器用于检测磁体的磁场变化,并获得转向轴的位置信号。本发明的

一种检测车辆方向盘转角的方法及装置.pdf
本发明提出一种检测车辆方向盘转角的方法及装置,采用车载智能终端MCU及其自带的3D加速度传感器,通过实时采集车辆加速度及速度等参数,计算出车轮转角,并间接检测车辆方向盘转角,在此基础上引入了低通数字滤波算法对采集到向心加速度进行滤波,使检测精度得到显著的提高。

一种汽车方向盘转角测量系统装置.pdf
本发明提供一种汽车方向盘转角测量系统装置,包括方向盘,车轮,触发杆,方向盘柱,单片机测量主板,左侧指示灯,右侧指示灯,标定按键,轴套,光电接受管,光电发射管,镂空刻度盘,围板,横连杆,定位通杆和数码显示管,方向盘的一侧设置有方向盘柱,方向盘柱的外周包裹有轴套,轴套的一侧设置有车轮,车轮的一侧固定设置有触发杆,方向盘的一端设置有单片机测量主板,单片机测量主板的外周设置有左侧指示灯,左侧指示灯的一侧设置有右侧指示灯,通过单片机测量主板测量光电接受管上发出的脉冲电压信号脉冲计算出方向盘的旋转角度,同时单片机测量

一种用于检测车辆方向盘自由转角的装置.pdf
本发明公开了一种用于检测车辆方向盘自由转角的装置,包括:固定组件、与所述固定组件连接的支杆、与所述支杆连接用于检测车辆方向盘自由转角的检测组件、以及与所述检测组件连接的夹紧组件;所述夹紧组件包括:调节杆、设置在所述调节杆两端用于夹紧方向盘的夹紧构件;所述检测组件可调节设置在所述调节杆上并处于所述调节杆两端的夹紧构件之间。本发明方法具有如下优点:使检测数据不会有误差,提升检测效率,降低测试人员的劳动强度。