
一种检测车辆方向盘转角的方法及装置.pdf

猫巷****正德


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种检测车辆方向盘转角的方法及装置.pdf
本发明提出一种检测车辆方向盘转角的方法及装置,采用车载智能终端MCU及其自带的3D加速度传感器,通过实时采集车辆加速度及速度等参数,计算出车轮转角,并间接检测车辆方向盘转角,在此基础上引入了低通数字滤波算法对采集到向心加速度进行滤波,使检测精度得到显著的提高。
一种车轮转角显示系统、车辆方向盘检测方法及装置.pdf
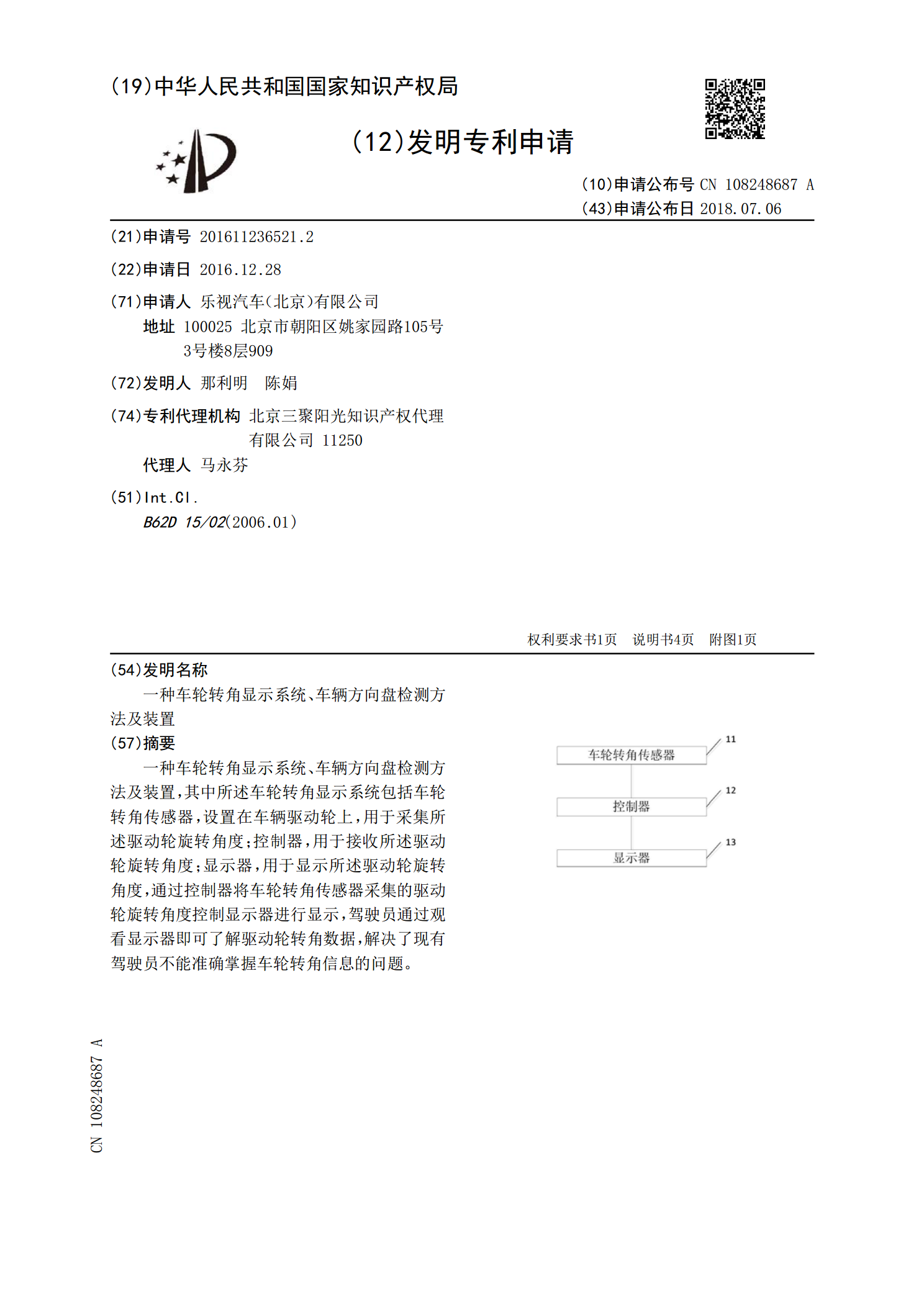
一种车轮转角显示系统、车辆方向盘检测方法及装置,其中所述车轮转角显示系统包括车轮转角传感器,设置在车辆驱动轮上,用于采集所述驱动轮旋转角度;控制器,用于接收所述驱动轮旋转角度;显示器,用于显示所述驱动轮旋转角度,通过控制器将车轮转角传感器采集的驱动轮旋转角度控制显示器进行显示,驾驶员通过观看显示器即可了解驱动轮转角数据,解决了现有驾驶员不能准确掌握车轮转角信息的问题。

一种用于检测车辆方向盘自由转角的装置.pdf
本发明公开了一种用于检测车辆方向盘自由转角的装置,包括:固定组件、与所述固定组件连接的支杆、与所述支杆连接用于检测车辆方向盘自由转角的检测组件、以及与所述检测组件连接的夹紧组件;所述夹紧组件包括:调节杆、设置在所述调节杆两端用于夹紧方向盘的夹紧构件;所述检测组件可调节设置在所述调节杆上并处于所述调节杆两端的夹紧构件之间。本发明方法具有如下优点:使检测数据不会有误差,提升检测效率,降低测试人员的劳动强度。
一种方向盘转角的计算方法及装置.pdf
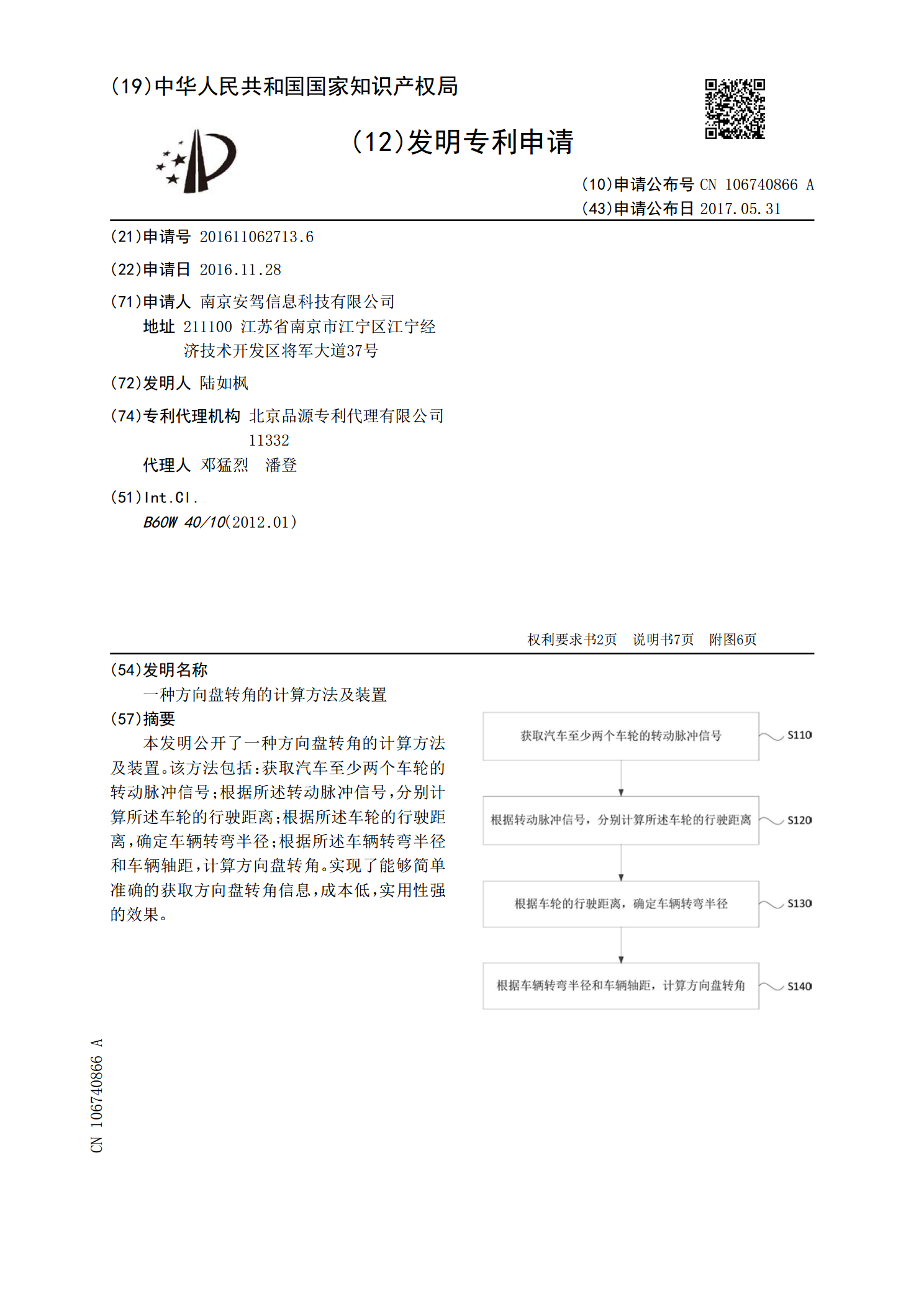
本发明公开了一种方向盘转角的计算方法及装置。该方法包括:获取汽车至少两个车轮的转动脉冲信号;根据所述转动脉冲信号,分别计算所述车轮的行驶距离;根据所述车轮的行驶距离,确定车辆转弯半径;根据所述车辆转弯半径和车辆轴距,计算方向盘转角。实现了能够简单准确的获取方向盘转角信息,成本低,实用性强的效果。

一种方向盘转角测量装置.pdf
本发明提供一种方向盘转角测量装置,属于汽车制造技术领域,其可解决现有的方向盘转角测量装置的结构复杂、成本较高,同时对精度要求很高的问题。本发明的方向盘转角测量装置包括:内齿轮副、磁体、磁感应传感器,所述内齿轮副包括:第一齿轮、第二齿轮,且第二齿轮的直径小于第一齿轮的半径;所述第二齿轮的内侧与方向盘转向轴相对固定连接;所述磁体设于第一齿轮的中心轴上,且磁体的N、S极连线方向与中心轴方向不平行;所述第一齿轮的中心轴与第一齿轮相对固定连接;所述磁感应传感器用于检测磁体的磁场变化,并获得转向轴的位置信号。本发明的