
绕线机电子凸轮控制系统及控制方法.pdf

景福****90


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

绕线机电子凸轮控制系统及控制方法.pdf
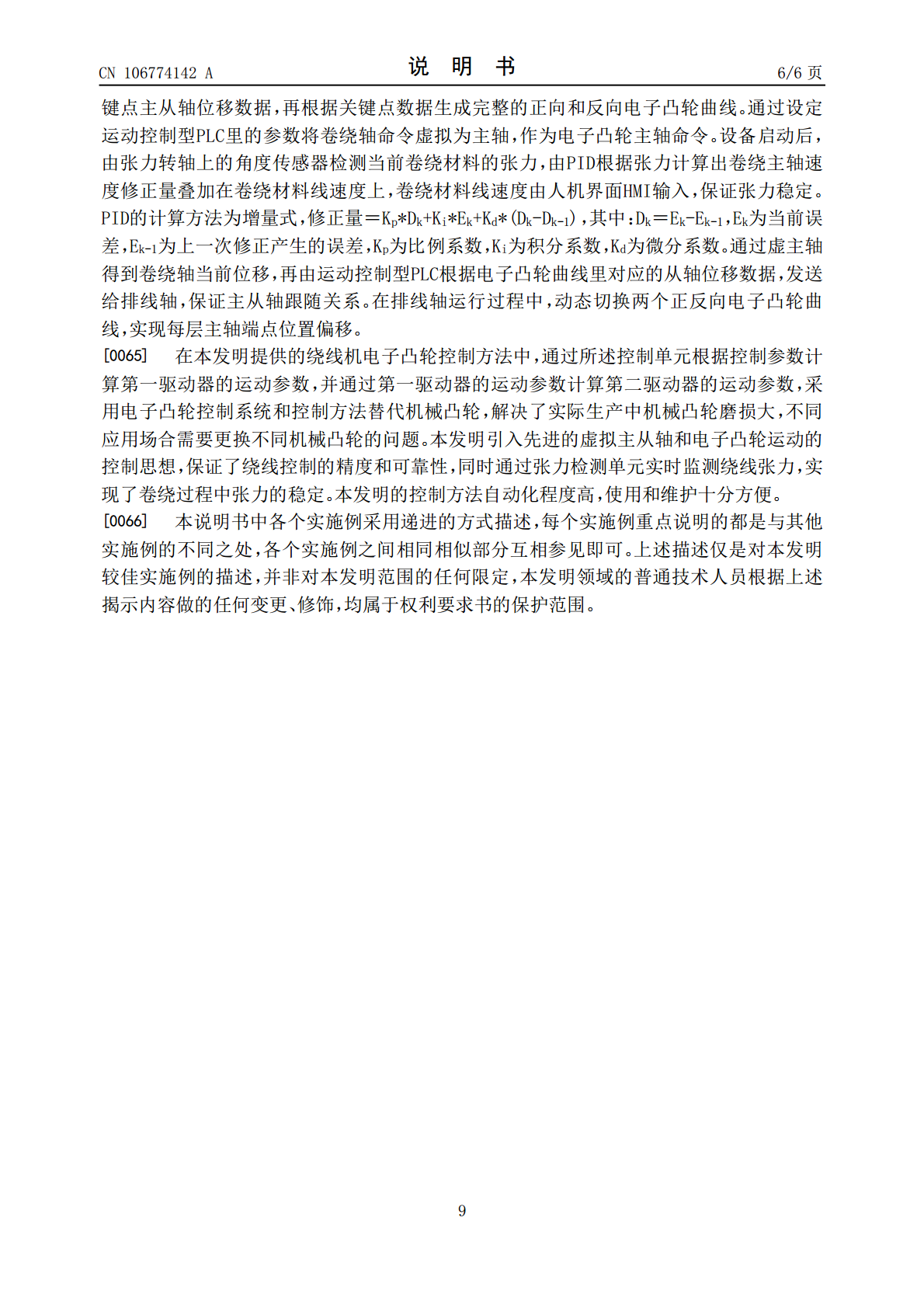
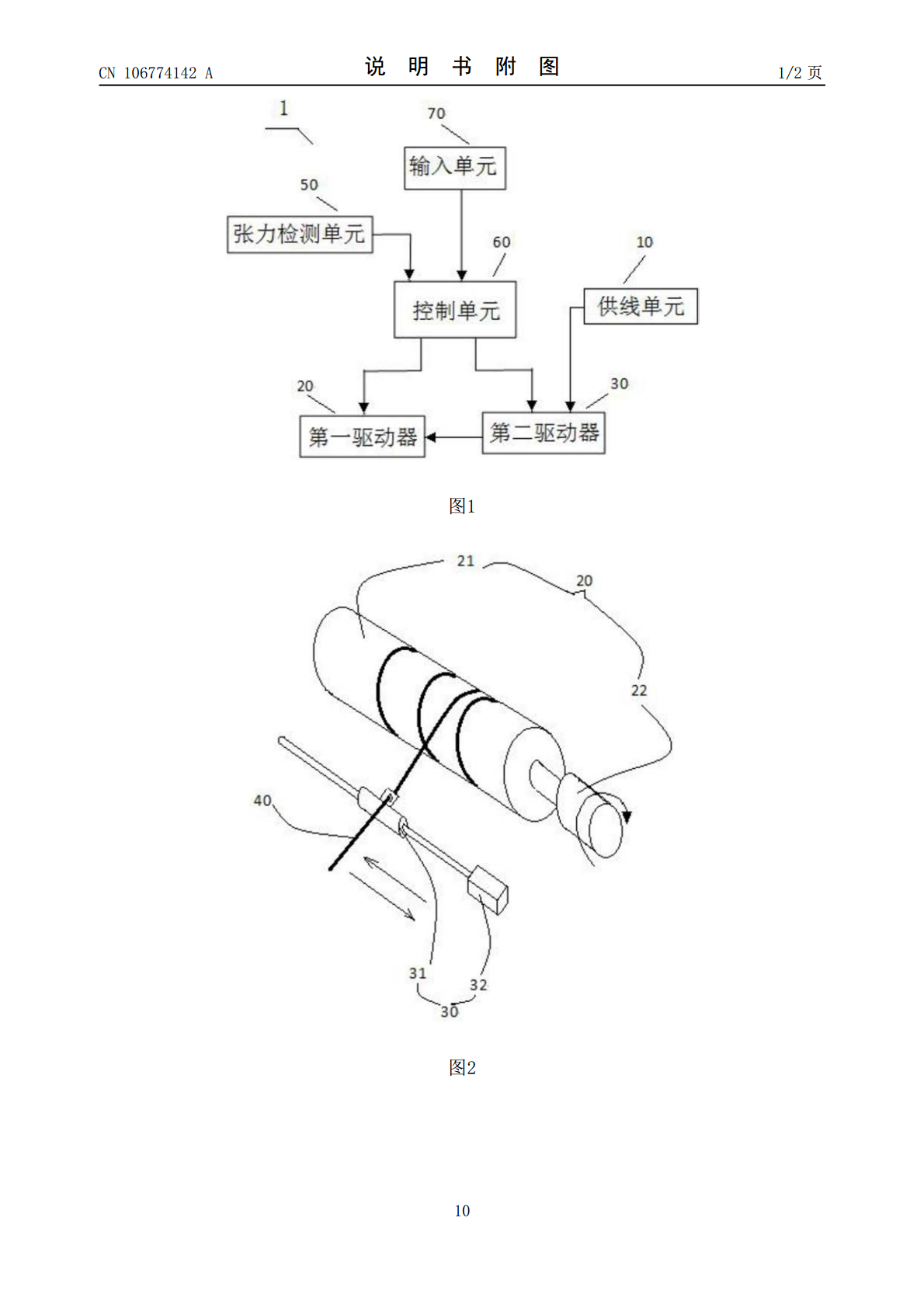
本发明提供了一种绕线机电子凸轮控制系统及控制方法,所述绕线机电子凸轮控制系统用于绕线机,包括输入单元、控制单元、供线单元、第一驱动器及第二驱动器,其中:所述输入单元将控制参数发送给控制单元;所述控制单元根据控制参数控制第一驱动器的运动,所述控制单元根据所述第一驱动器的运动控制所述第二驱动器的运动;所述供线单元向所述第一驱动器和所述第二驱动器提供绕线,所述绕线先连接到所述第一驱动器,再连接到所述第二驱动器;所述第一驱动器作旋转运动,对绕线进行卷绕;所述第二驱动器作直线运动,对绕线进行排线。本方法才用电子凸轮

电子凸轮控制系统及控制方法.pdf
本发明提供了一种电子凸轮控制系统及控制方法,所述电子凸轮控制系统用于灌装流水线,包括输入单元、控制单元、第一驱动器及第二驱动器,其中:所述输入单元将控制参数发送给控制单元;所述控制单元根据控制参数控制第一驱动器的运动,所述控制单元根据所述第一驱动器的运动控制所述第二驱动器的运动;所述第一驱动器作直线运动,所述第二驱动器作直线运动。本方法通过所述控制单元根据所述第一驱动器的运动控制所述第二驱动器的运动,利用运动控制型PLC的电子凸轮功能,取代传统机械凸轮,使得设备制造安装、操作、保养维修更简单方便,减少了机

电子凸轮涂胶长度控制系统及其控制方法.pdf
本发明公开了一种电子凸轮涂胶长度控制系统及其控制方法,该电子凸轮涂胶长度控制系统摒弃传统的机械凸轮、取而代之的是用脉冲编码器来检测胶订机主轴的位置,脉冲编码器与控制器等形成虚拟的电子凸轮,通过人机界面直接输入涂胶长度,开胶点和闭胶点的位置由电子凸轮控制,本发明的电子凸轮涂胶长度控制系统依据胶订机主轴的位置来转换读取脉冲编码器的数字量,从而可以精确实现电子凸轮控制涂胶长度的控制。因此,本发明的电子凸轮涂胶长度控制系统摒弃传统的控制精度高、调整速度快、涂胶效率高,特别适合短版小批量的书藉装订。

可编程逻辑控制器的电子凸轮控制系统及方法.pdf
本发明提供了一种可编程逻辑控制器的电子凸轮控制系统,包括位于可编程逻辑控制器的FPGA模块的双口RAM单元、电子凸轮控制单元、主轴位置计数单元以及从轴脉冲计数单元。本发明还提供一种对应的方法。本发明的电子凸轮控制系统及方法,通过FPGA模块获得节点处的主轴位置数据与主轴当前位置之差和从轴位置数据与从轴已输出脉冲数之差,并据此控制从轴动作,不仅节省了可编程逻辑控制器的资源,而且大大提高了电子凸轮的控制精度。
电子凸轮控制装置以及电子凸轮曲线生成方法.pdf
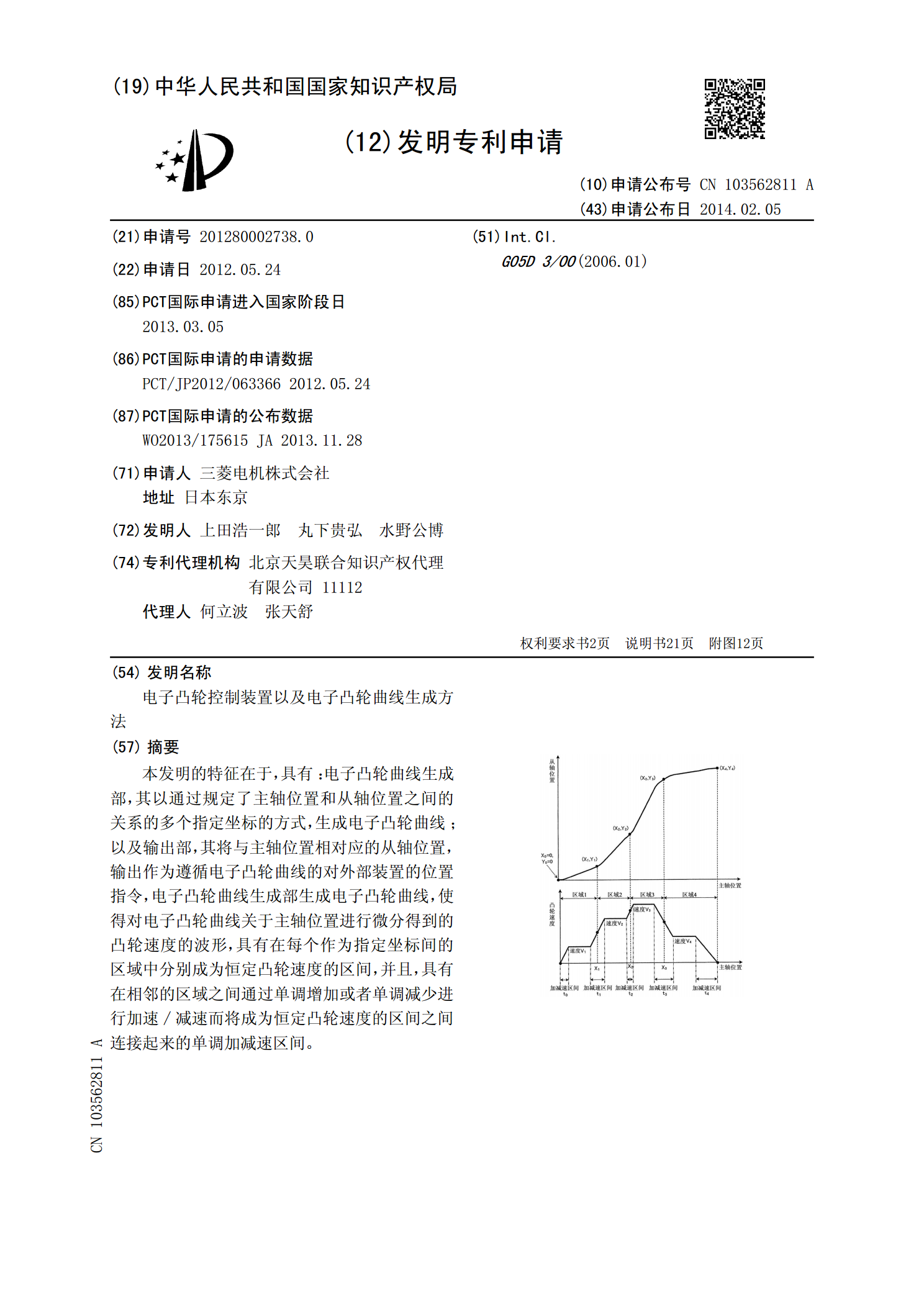
本发明的特征在于,具有:电子凸轮曲线生成部,其以通过规定了主轴位置和从轴位置之间的关系的多个指定坐标的方式,生成电子凸轮曲线;以及输出部,其将与主轴位置相对应的从轴位置,输出作为遵循电子凸轮曲线的对外部装置的位置指令,电子凸轮曲线生成部生成电子凸轮曲线,使得对电子凸轮曲线关于主轴位置进行微分得到的凸轮速度的波形,具有在每个作为指定坐标间的区域中分别成为恒定凸轮速度的区间,并且,具有在相邻的区域之间通过单调增加或者单调减少进行加速/减速而将成为恒定凸轮速度的区间之间连接起来的单调加减速区间。