
一种可移动剪叉升降式机械臂.pdf

涵蓄****09

1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可移动剪叉升降式机械臂.pdf
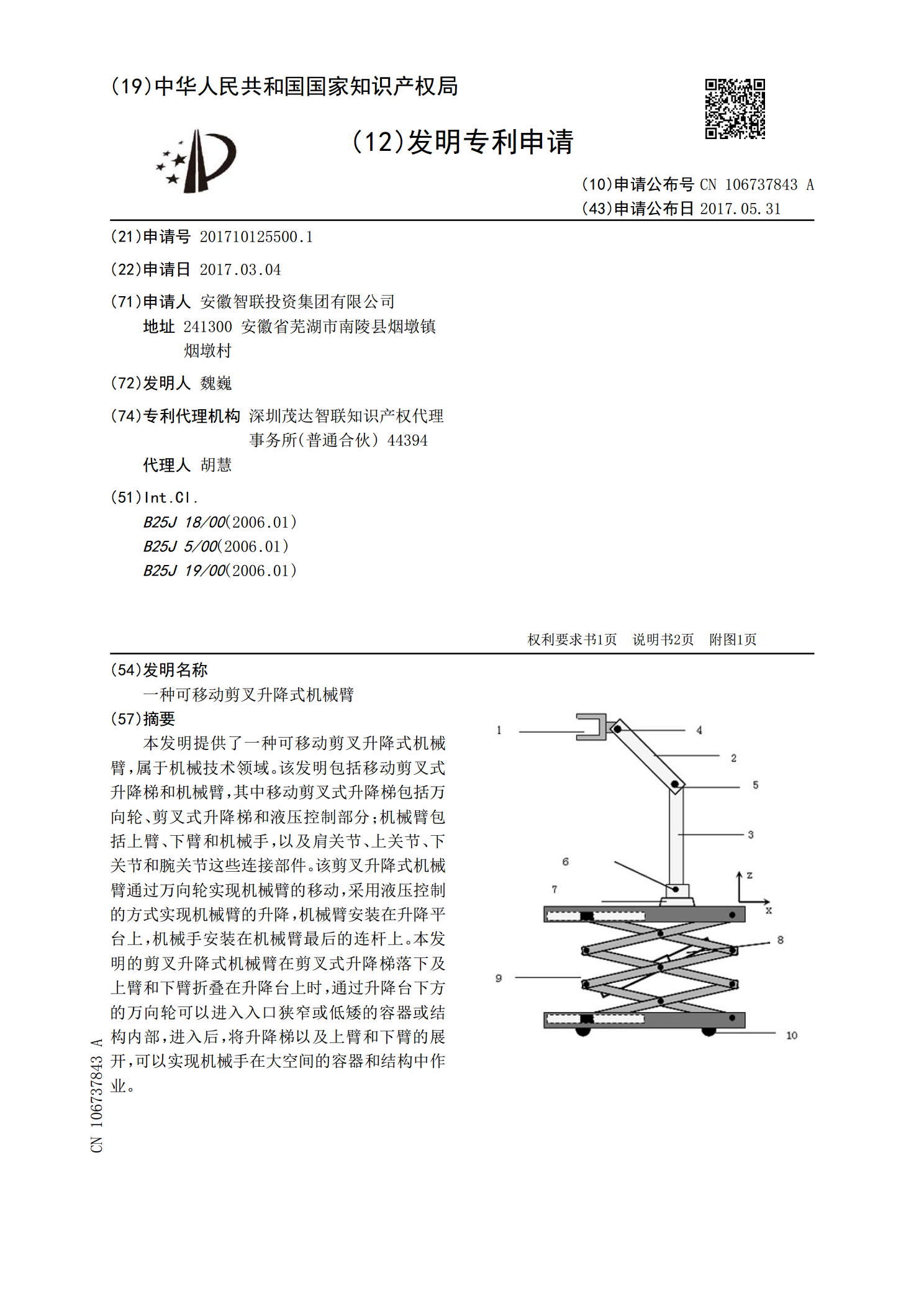
本发明提供了一种可移动剪叉升降式机械臂,属于机械技术领域。该发明包括移动剪叉式升降梯和机械臂,其中移动剪叉式升降梯包括万向轮、剪叉式升降梯和液压控制部分;机械臂包括上臂、下臂和机械手,以及肩关节、上关节、下关节和腕关节这些连接部件。该剪叉升降式机械臂通过万向轮实现机械臂的移动,采用液压控制的方式实现机械臂的升降,机械臂安装在升降平台上,机械手安装在机械臂最后的连杆上。本发明的剪叉升降式机械臂在剪叉式升降梯落下及上臂和下臂折叠在升降台上时,通过升降台下方的万向轮可以进入入口狭窄或低矮的容器或结构内部,进入后
一种可移动剪叉式升降平台.pdf
本发明涉及升降平台的技术领域,尤其是一种可移动剪叉式升降平台,包括底座、电动推杆、滑动支座、剪叉机构、连接杆、万向轮、活动铰链、支脚脚板、控制箱、控制平台、上支撑平板、护栏、液压支撑杆和底板,所述底座上安装有滑动支座和液压支撑杆,所述剪叉机构一端与底座固定连接在一起,另一端通过连接杆连接在滑动支座上,所述电动推杆一端通过固定推杆支座连接在底座上,另一端与连接杆连接在一起,所述支撑脚板通过活动铰链与底板连接在一起,所述底板上安装有控制箱和控制平台,所述护栏安装在上支撑平板上,起到保护作用。解决了现有升降平台
一种移动式斜拉剪叉臂架升降平台.pdf
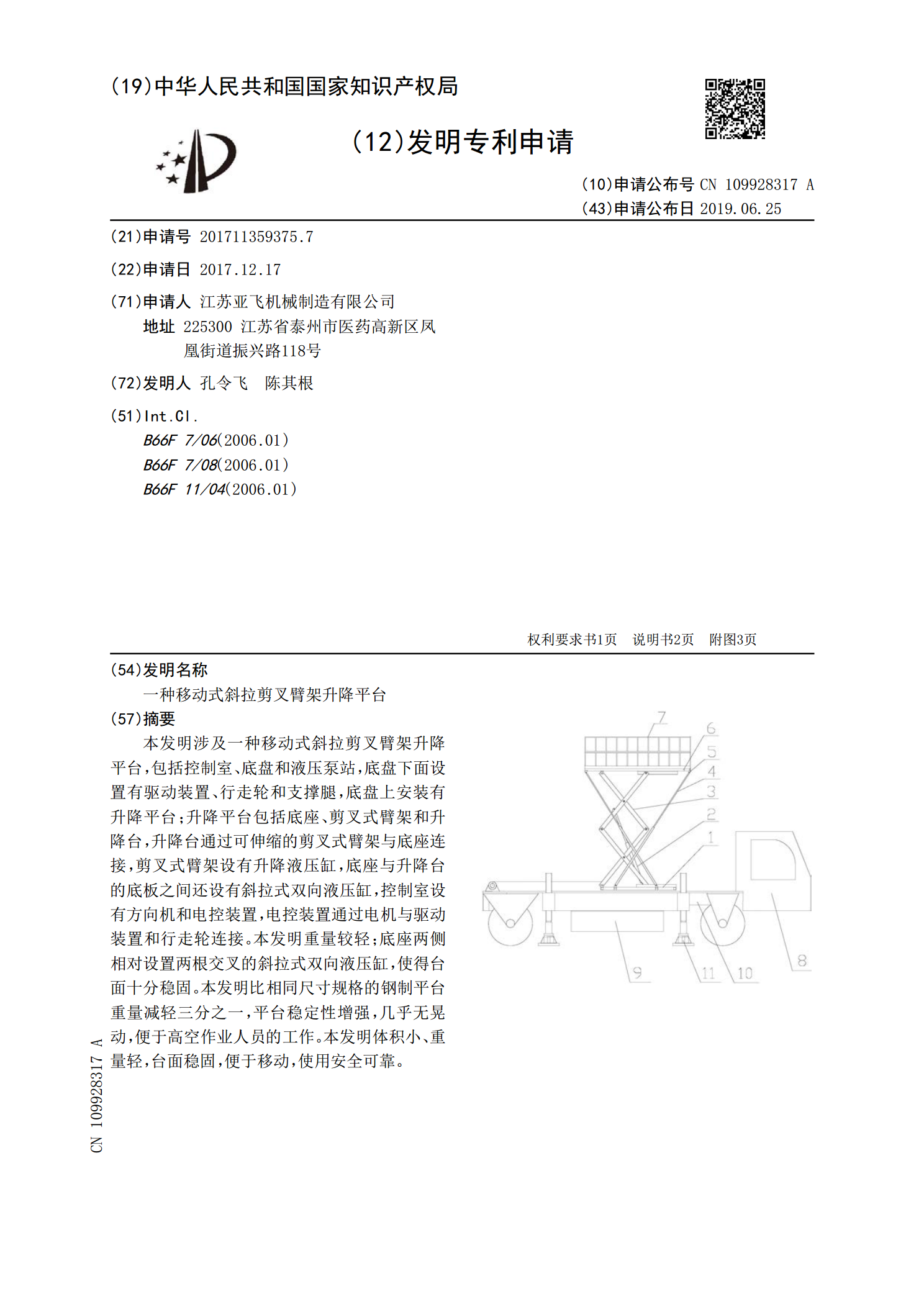
本发明涉及一种移动式斜拉剪叉臂架升降平台,包括控制室、底盘和液压泵站,底盘下面设置有驱动装置、行走轮和支撑腿,底盘上安装有升降平台;升降平台包括底座、剪叉式臂架和升降台,升降台通过可伸缩的剪叉式臂架与底座连接,剪叉式臂架设有升降液压缸,底座与升降台的底板之间还设有斜拉式双向液压缸,控制室设有方向机和电控装置,电控装置通过电机与驱动装置和行走轮连接。本发明重量较轻;底座两侧相对设置两根交叉的斜拉式双向液压缸,使得台面十分稳固。本发明比相同尺寸规格的钢制平台重量减轻三分之一,平台稳定性增强,几乎无晃动,便于高
移动式液压升降剪叉臂架工具车.pdf
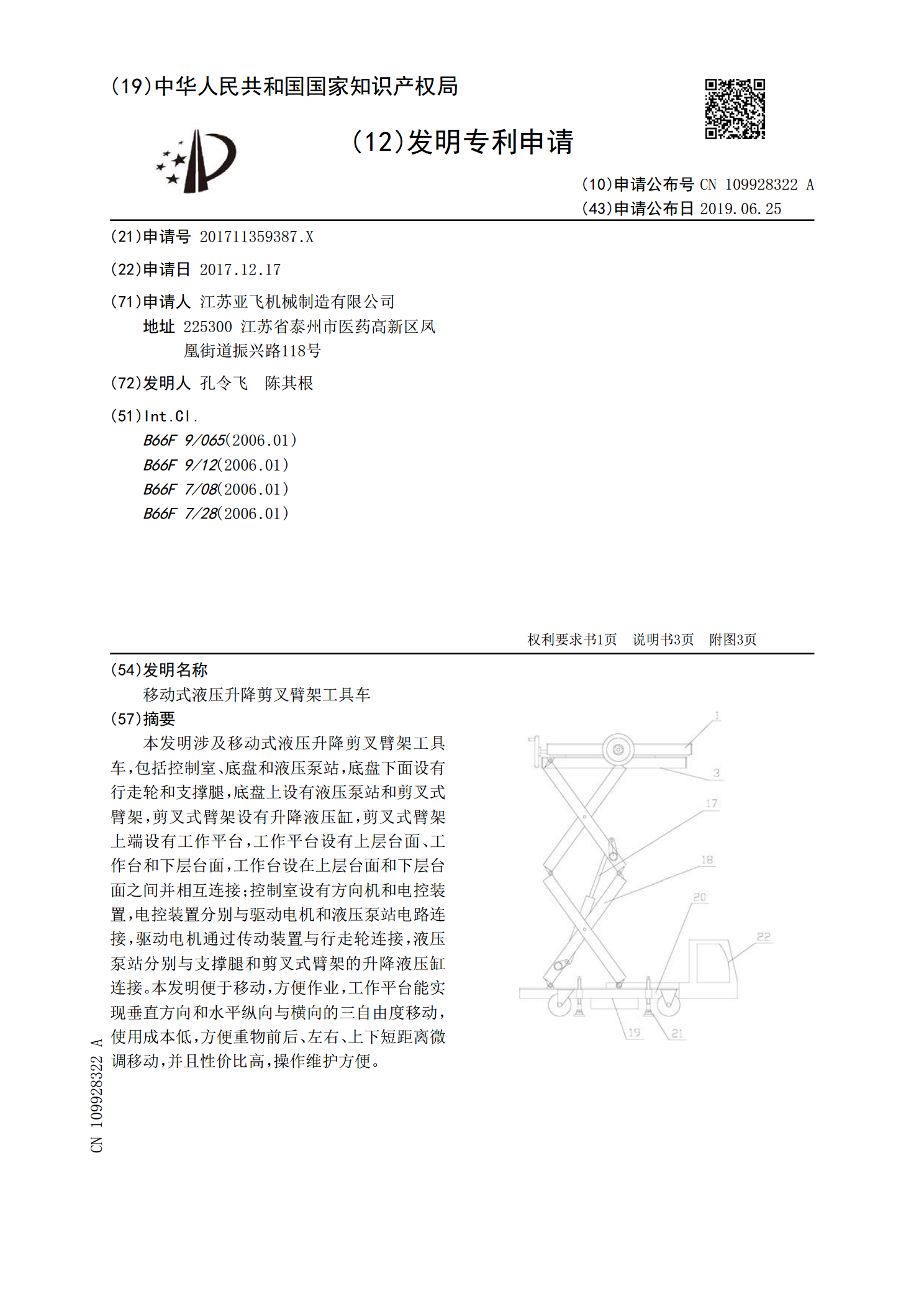
本发明涉及移动式液压升降剪叉臂架工具车,包括控制室、底盘和液压泵站,底盘下面设有行走轮和支撑腿,底盘上设有液压泵站和剪叉式臂架,剪叉式臂架设有升降液压缸,剪叉式臂架上端设有工作平台,工作平台设有上层台面、工作台和下层台面,工作台设在上层台面和下层台面之间并相互连接;控制室设有方向机和电控装置,电控装置分别与驱动电机和液压泵站电路连接,驱动电机通过传动装置与行走轮连接,液压泵站分别与支撑腿和剪叉式臂架的升降液压缸连接。本发明便于移动,方便作业,工作平台能实现垂直方向和水平纵向与横向的三自由度移动,使用成本低
一种可移动式机械臂.pdf
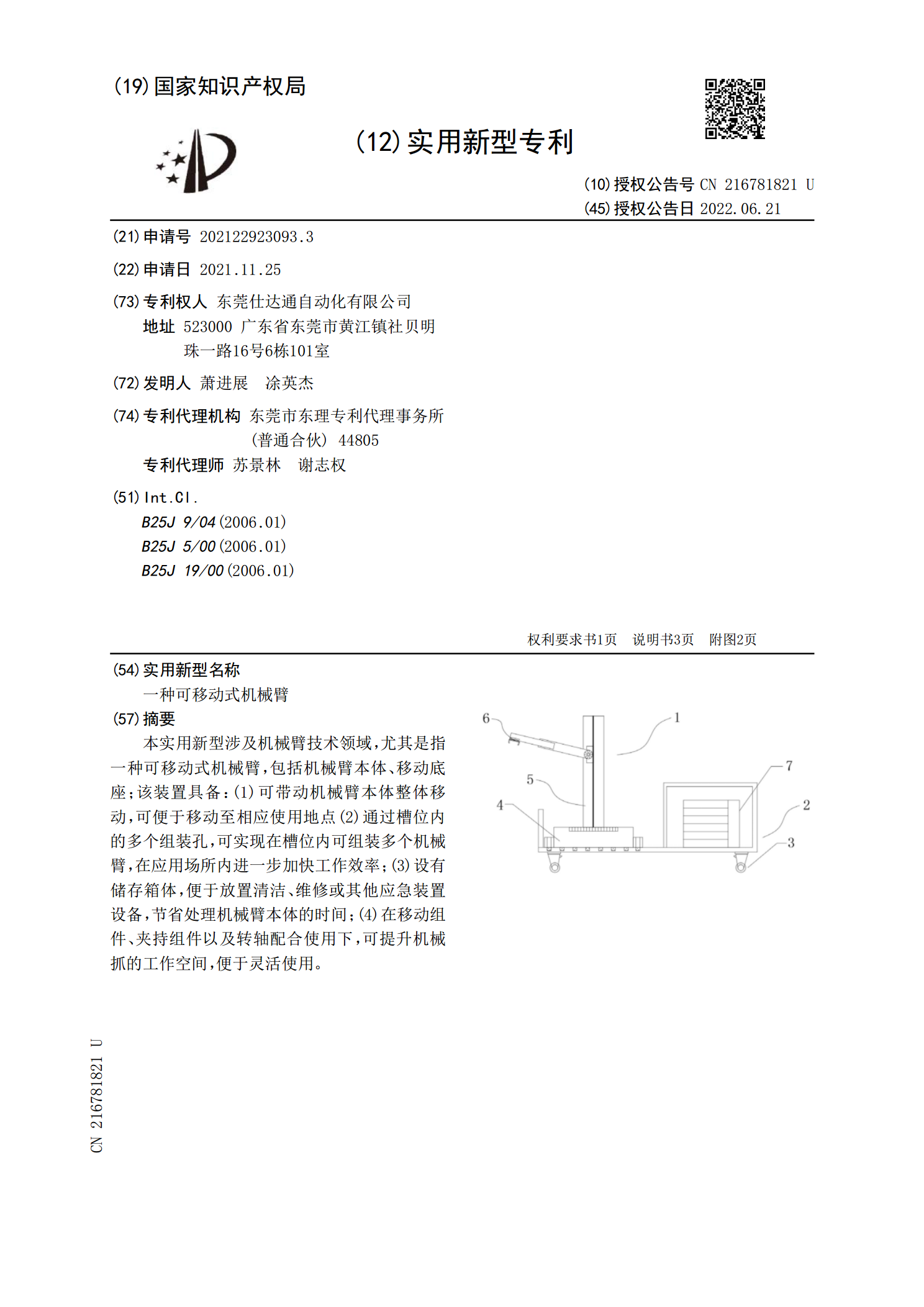
本实用新型涉及机械臂技术领域,尤其是指一种可移动式机械臂,包括机械臂本体、移动底座;该装置具备:(1)可带动机械臂本体整体移动,可便于移动至相应使用地点(2)通过槽位内的多个组装孔,可实现在槽位内可组装多个机械臂,在应用场所内进一步加快工作效率;(3)设有储存箱体,便于放置清洁、维修或其他应急装置设备,节省处理机械臂本体的时间;(4)在移动组件、夹持组件以及转轴配合使用下,可提升机械抓的工作空间,便于灵活使用。