
飞机机轮速度高精度采集方法.pdf

努力****晓骞

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
飞机机轮速度高精度采集方法.pdf
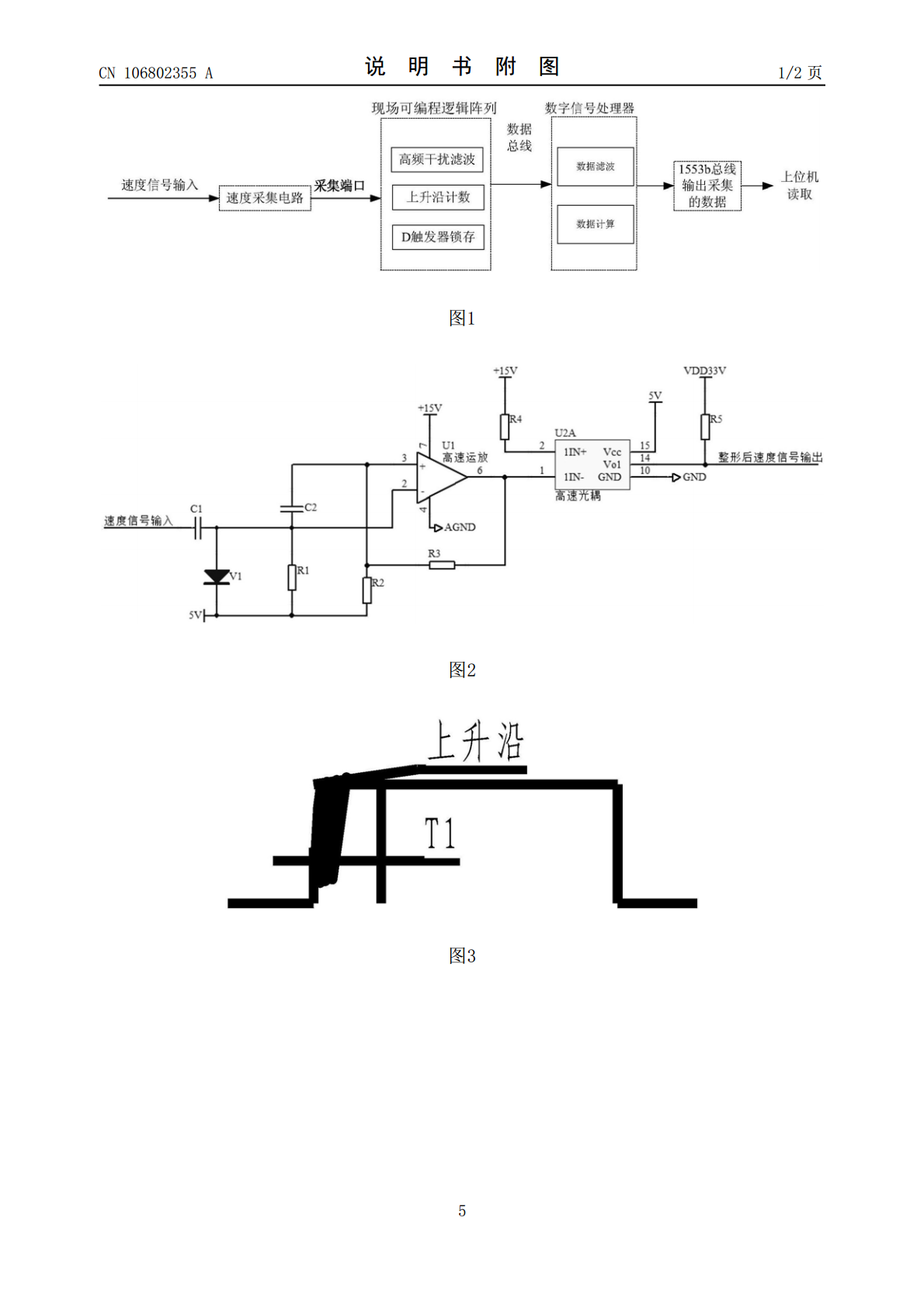
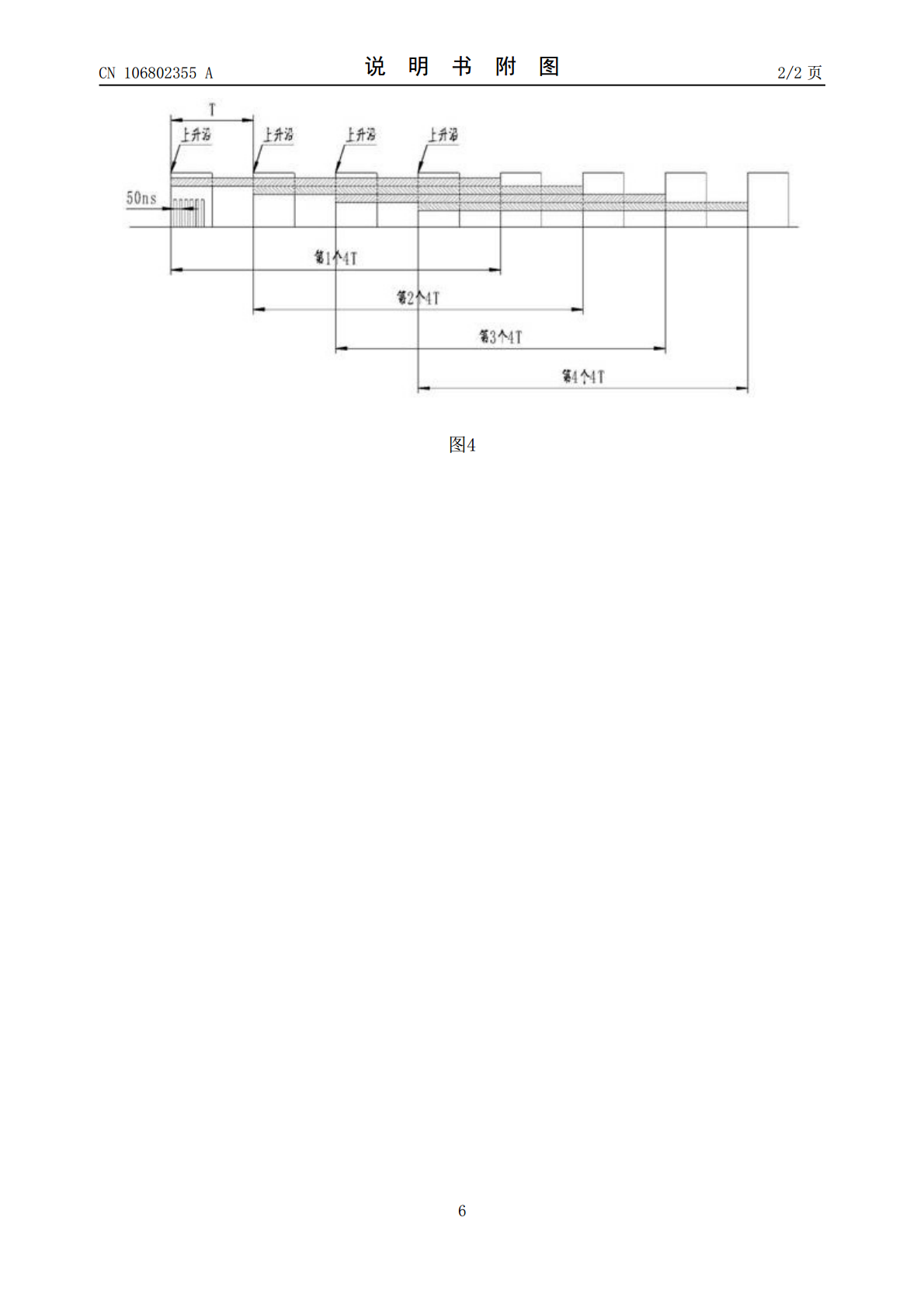
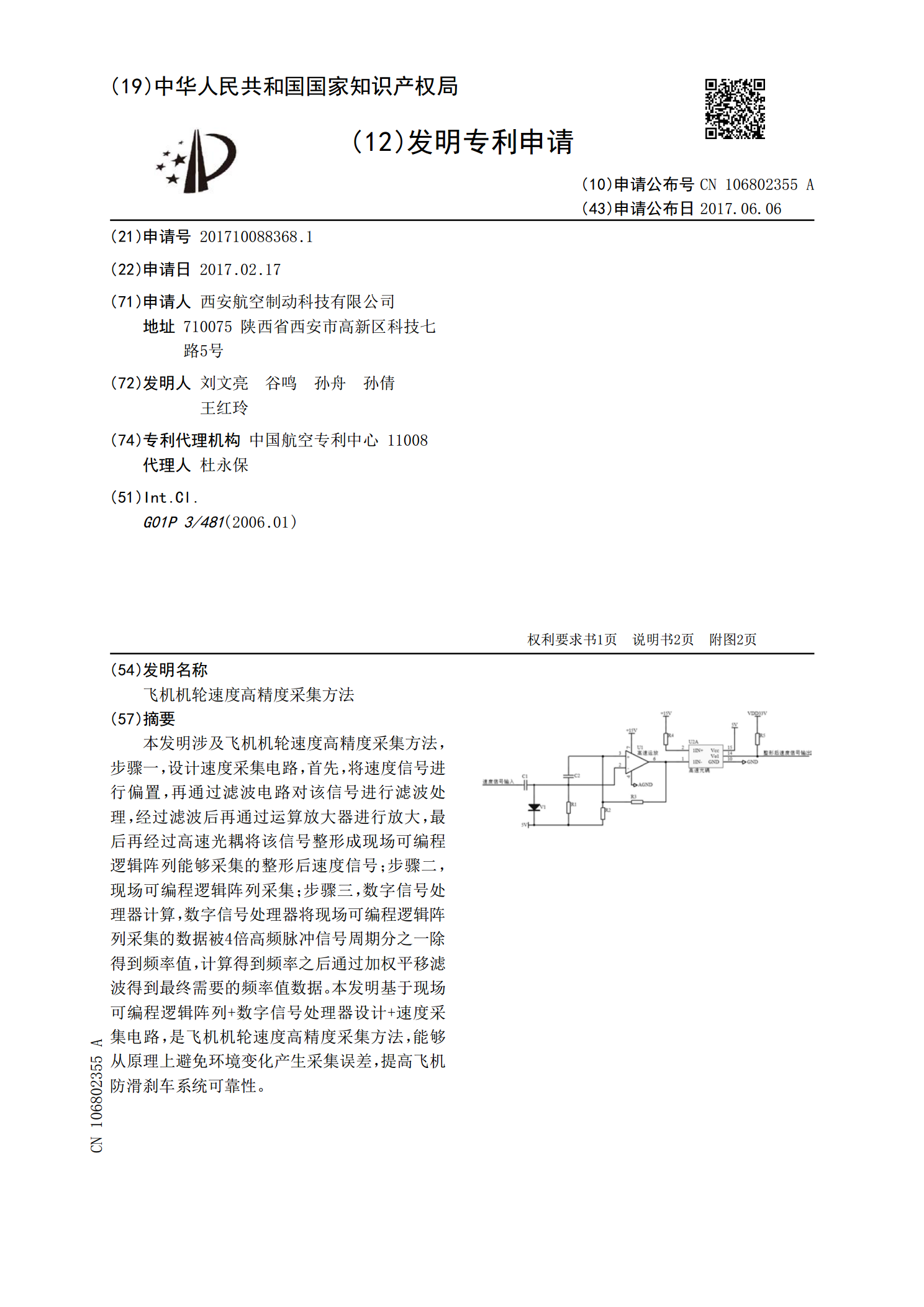
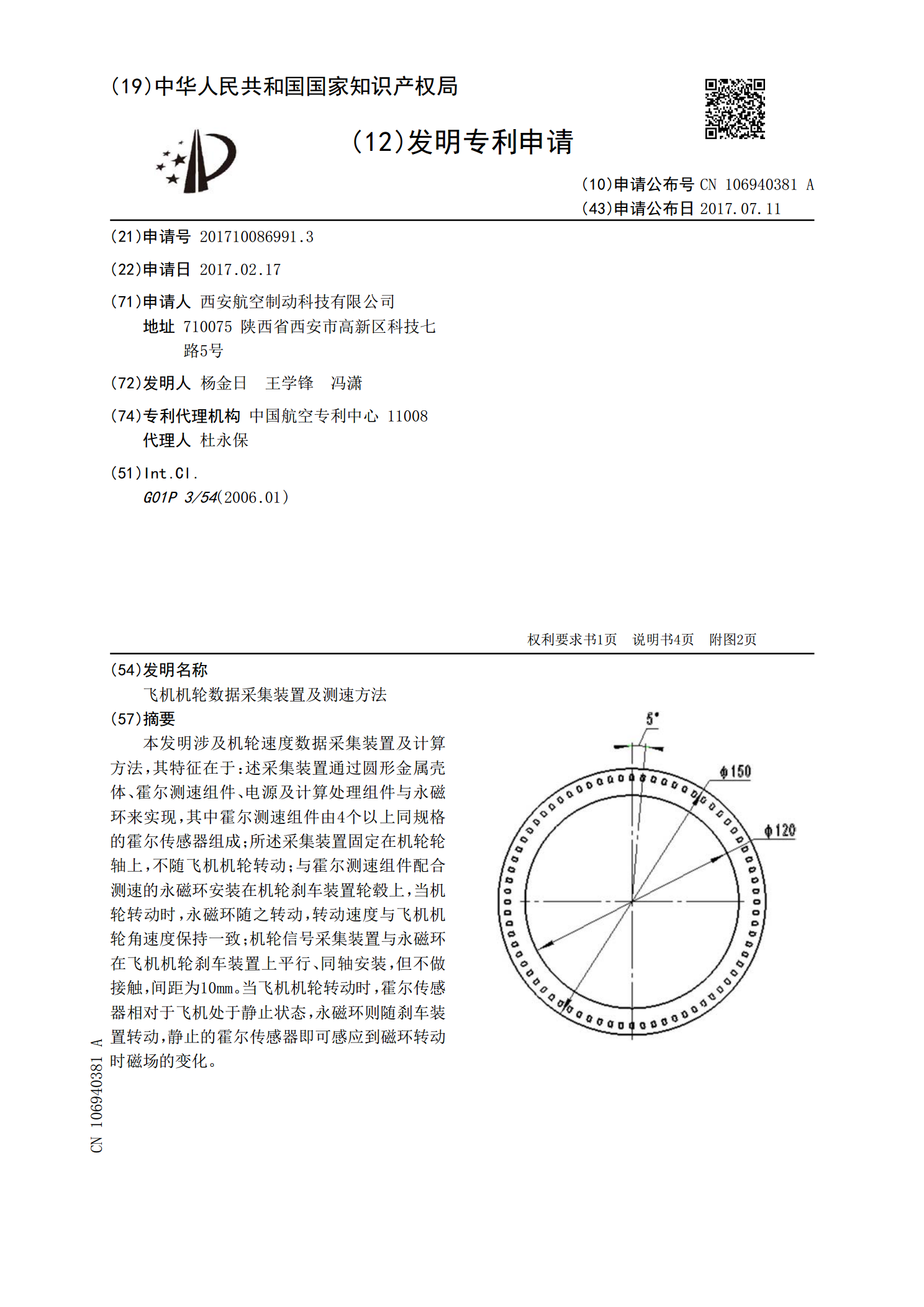
本发明涉及飞机机轮速度高精度采集方法,步骤一,设计速度采集电路,首先,将速度信号进行偏置,再通过滤波电路对该信号进行滤波处理,经过滤波后再通过运算放大器进行放大,最后再经过高速光耦将该信号整形成现场可编程逻辑阵列能够采集的整形后速度信号;步骤二,现场可编程逻辑阵列采集;步骤三,数字信号处理器计算,数字信号处理器将现场可编程逻辑阵列采集的数据被4倍高频脉冲信号周期分之一除得到频率值,计算得到频率之后通过加权平移滤波得到最终需要的频率值数据。本发明基于现场可编程逻辑阵列+数字信号处理器设计+速度采集电路,是飞
飞机机轮数据采集装置及测速方法.pdf
本发明涉及机轮速度数据采集装置及计算方法,其特征在于:述采集装置通过圆形金属壳体、霍尔测速组件、电源及计算处理组件与永磁环来实现,其中霍尔测速组件由4个以上同规格的霍尔传感器组成;所述采集装置固定在机轮轮轴上,不随飞机机轮转动;与霍尔测速组件配合测速的永磁环安装在机轮刹车装置轮毂上,当机轮转动时,永磁环随之转动,转动速度与飞机机轮角速度保持一致;机轮信号采集装置与永磁环在飞机机轮刹车装置上平行、同轴安装,但不做接触,间距为10mm。当飞机机轮转动时,霍尔传感器相对于飞机处于静止状态,永磁环则随刹车装置转动
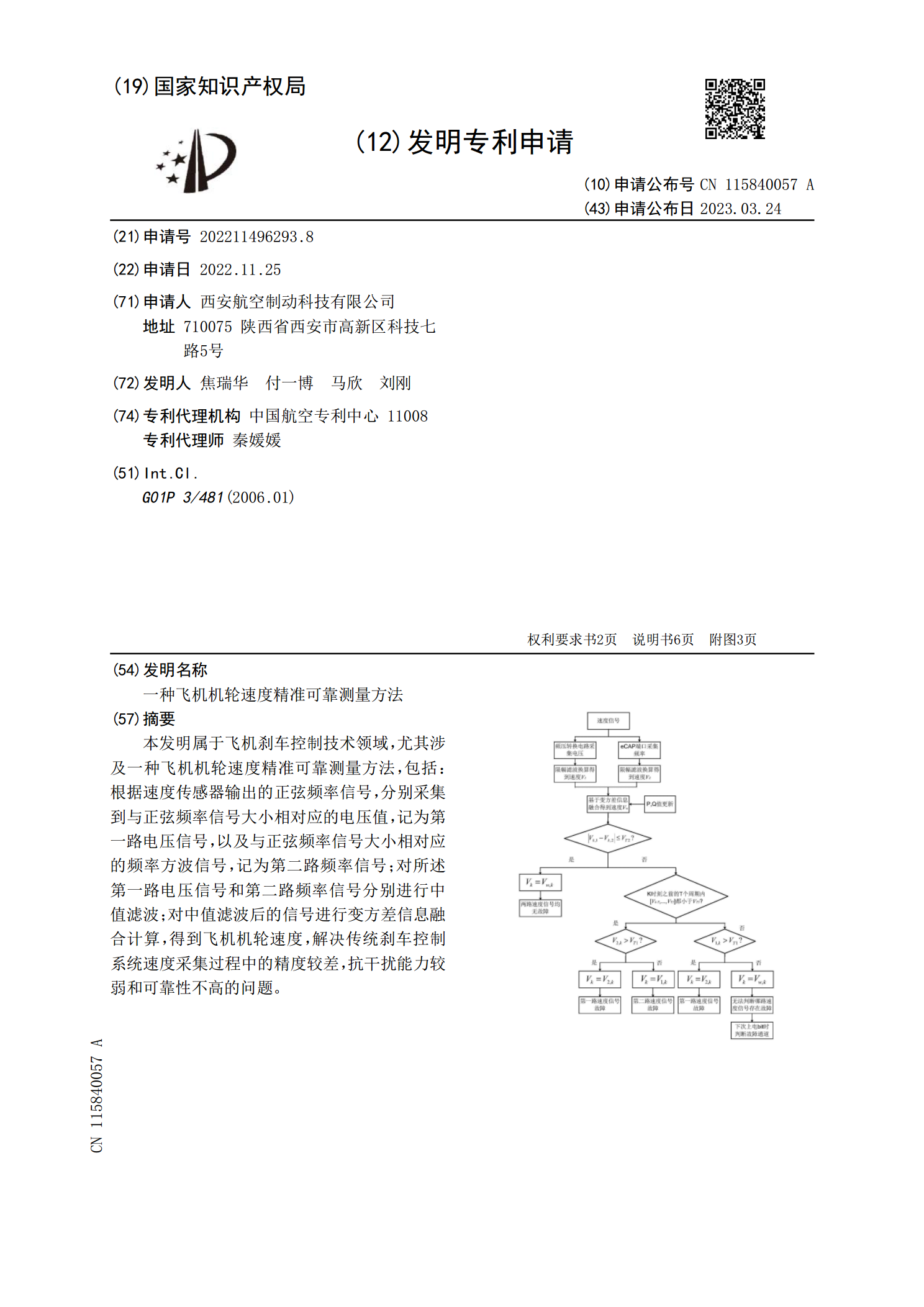
一种飞机机轮速度精准可靠测量方法.pdf
本发明属于飞机刹车控制技术领域,尤其涉及一种飞机机轮速度精准可靠测量方法,包括:根据速度传感器输出的正弦频率信号,分别采集到与正弦频率信号大小相对应的电压值,记为第一路电压信号,以及与正弦频率信号大小相对应的频率方波信号,记为第二路频率信号;对所述第一路电压信号和第二路频率信号分别进行中值滤波;对中值滤波后的信号进行变方差信息融合计算,得到飞机机轮速度,解决传统刹车控制系统速度采集过程中的精度较差,抗干扰能力较弱和可靠性不高的问题。

飞机机轮及助降方法.pdf
本发明公开了一种飞机机轮及助降方法,飞机机轮包括轮胎、外轮毂和内核部,轮胎套设在外轮毂上,内核部设置在外轮毂的腔内,外轮毂的内表面上设有多块永磁钢,内核部包括多个线圈组、制动电阻、控制器以及轮轴,多个线圈组分布在内核部的外缘区域与多块永磁钢相对应,控制器与多个线圈组、制动电阻分别电联接,轮轴位于内核部的中心轴线上,外轮毂套设在轮轴上。所述内核部还包括定子铁芯和固定架,定子铁芯套设在固定架上,所述多个线圈组设置在定子铁芯上,所述轮轴设置在固定架的中心。它能有效降低飞机在降落时机轮触地受到的滑动摩擦力及偏转力
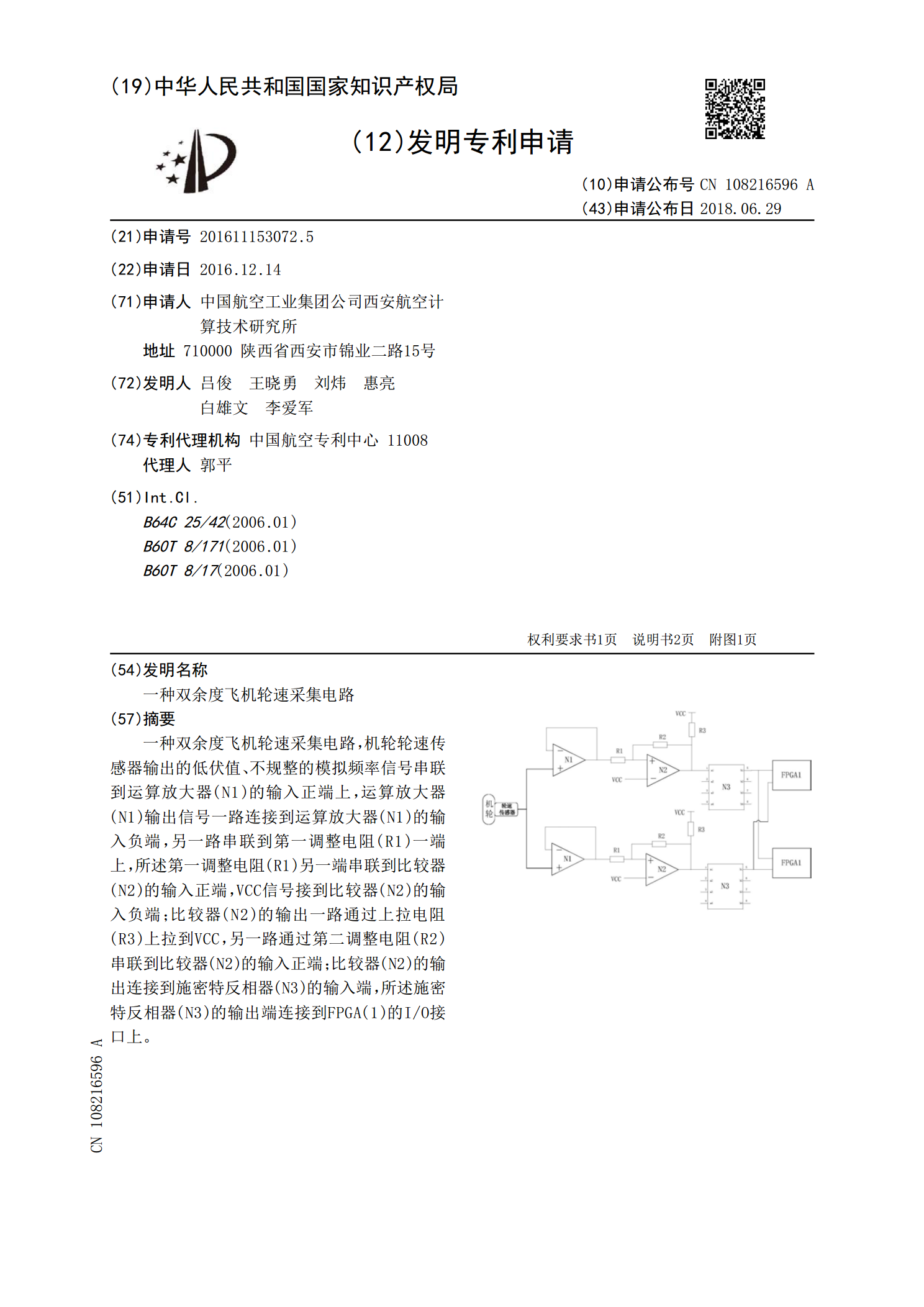
一种双余度飞机轮速采集电路.pdf
一种双余度飞机轮速采集电路,机轮轮速传感器输出的低伏值、不规整的模拟频率信号串联到运算放大器(N1)的输入正端上,运算放大器(N1)输出信号一路连接到运算放大器(N1)的输入负端,另一路串联到第一调整电阻(R1)一端上,所述第一调整电阻(R1)另一端串联到比较器(N2)的输入正端,VCC信号接到比较器(N2)的输入负端;比较器(N2)的输出一路通过上拉电阻(R3)上拉到VCC,另一路通过第二调整电阻(R2)串联到比较器(N2)的输入正端;比较器(N2)的输出连接到施密特反相器(N3)的输入端,所述施密特反