
一种飞机机轮速度精准可靠测量方法.pdf

猫巷****松臣

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种飞机机轮速度精准可靠测量方法.pdf
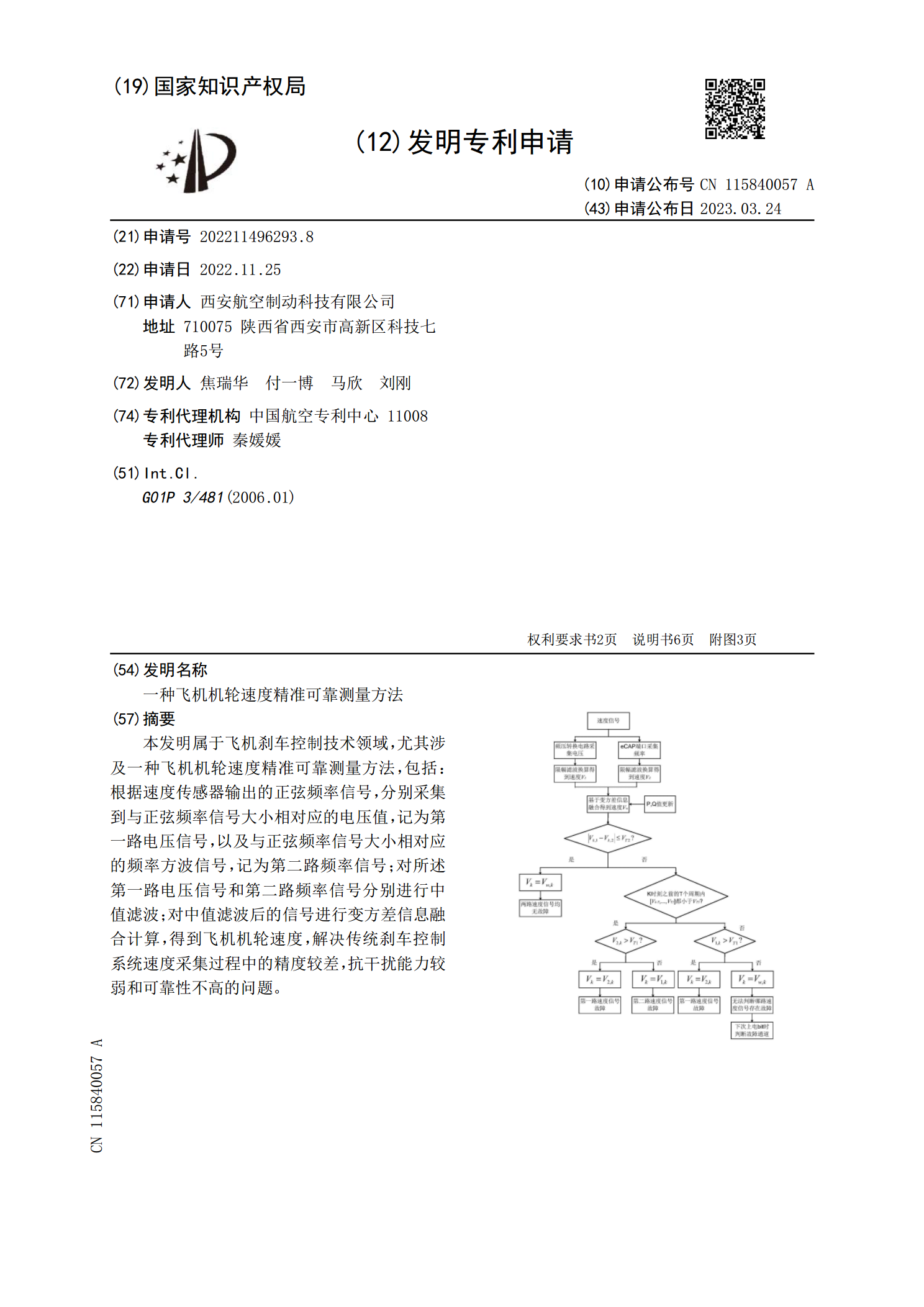
本发明属于飞机刹车控制技术领域,尤其涉及一种飞机机轮速度精准可靠测量方法,包括:根据速度传感器输出的正弦频率信号,分别采集到与正弦频率信号大小相对应的电压值,记为第一路电压信号,以及与正弦频率信号大小相对应的频率方波信号,记为第二路频率信号;对所述第一路电压信号和第二路频率信号分别进行中值滤波;对中值滤波后的信号进行变方差信息融合计算,得到飞机机轮速度,解决传统刹车控制系统速度采集过程中的精度较差,抗干扰能力较弱和可靠性不高的问题。
飞机机轮速度高精度采集方法.pdf
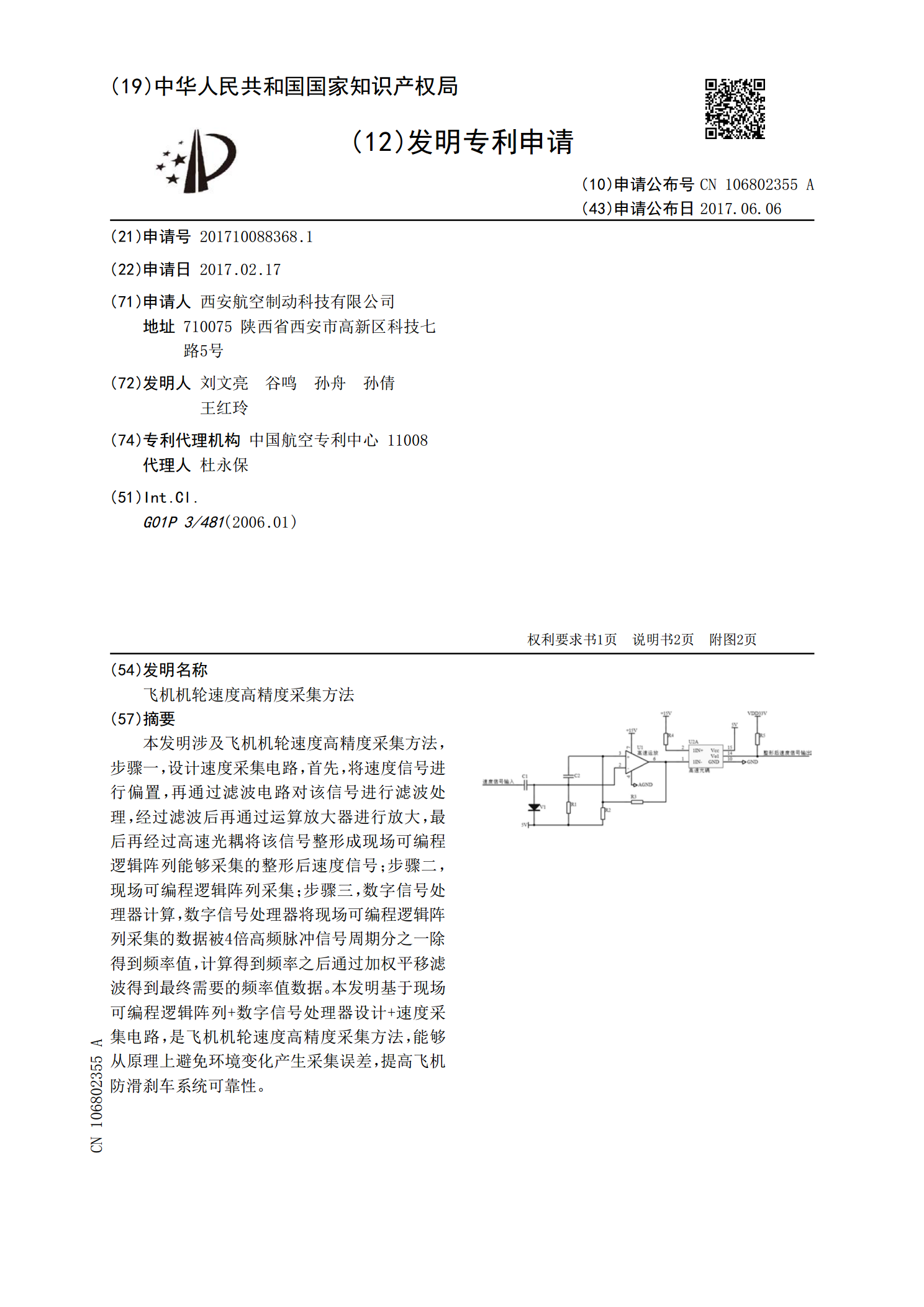
本发明涉及飞机机轮速度高精度采集方法,步骤一,设计速度采集电路,首先,将速度信号进行偏置,再通过滤波电路对该信号进行滤波处理,经过滤波后再通过运算放大器进行放大,最后再经过高速光耦将该信号整形成现场可编程逻辑阵列能够采集的整形后速度信号;步骤二,现场可编程逻辑阵列采集;步骤三,数字信号处理器计算,数字信号处理器将现场可编程逻辑阵列采集的数据被4倍高频脉冲信号周期分之一除得到频率值,计算得到频率之后通过加权平移滤波得到最终需要的频率值数据。本发明基于现场可编程逻辑阵列+数字信号处理器设计+速度采集电路,是飞

一种飞机轮胎压缩量的测量装置及测量方法.pdf
一种飞机轮胎压缩量的测量装置及测量方法。所述的飞机轮胎压缩量的测量装置包括固定支座、万向球铰、直线位移传感器和三轴向倾角传感器。直线位移传感器的两端各有一个万向球铰,三轴向倾角传感器粘贴在所述直线位移传感器套筒端的外圆周表面上,在带起落架机轮刹车试验时测量轮胎压缩量。本发明利用简单的测量装置及方法就能实现对轮胎压缩量的精确测量,克服了传统滑动摇臂测量法对装置安装的苛刻要求以及测量存在误差的缺点,并可实时测量,得到轮胎压缩量的实时动态响应曲线。测量得到的数据可对轮胎强度、寿命进行准确的评估,为研究性能更佳的
一种用于飞机轮胎压缩量的测量装置及测量方法.pdf
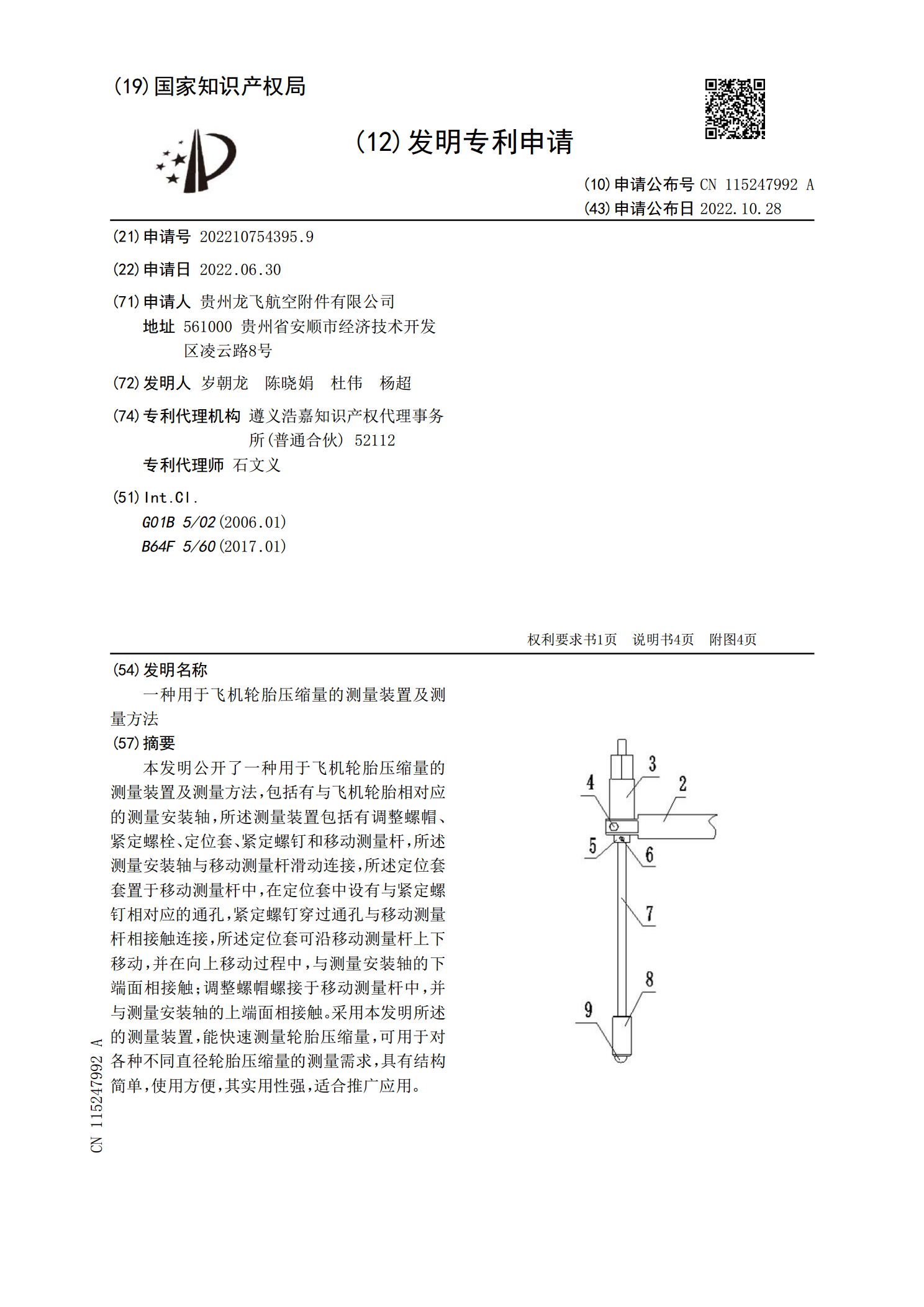
本发明公开了一种用于飞机轮胎压缩量的测量装置及测量方法,包括有与飞机轮胎相对应的测量安装轴,所述测量装置包括有调整螺帽、紧定螺栓、定位套、紧定螺钉和移动测量杆,所述测量安装轴与移动测量杆滑动连接,所述定位套套置于移动测量杆中,在定位套中设有与紧定螺钉相对应的通孔,紧定螺钉穿过通孔与移动测量杆相接触连接,所述定位套可沿移动测量杆上下移动,并在向上移动过程中,与测量安装轴的下端面相接触;调整螺帽螺接于移动测量杆中,并与测量安装轴的上端面相接触。采用本发明所述的测量装置,能快速测量轮胎压缩量,可用于对各种不同直
一种用于飞机机轮速度传感器的弹性联接装置.pdf
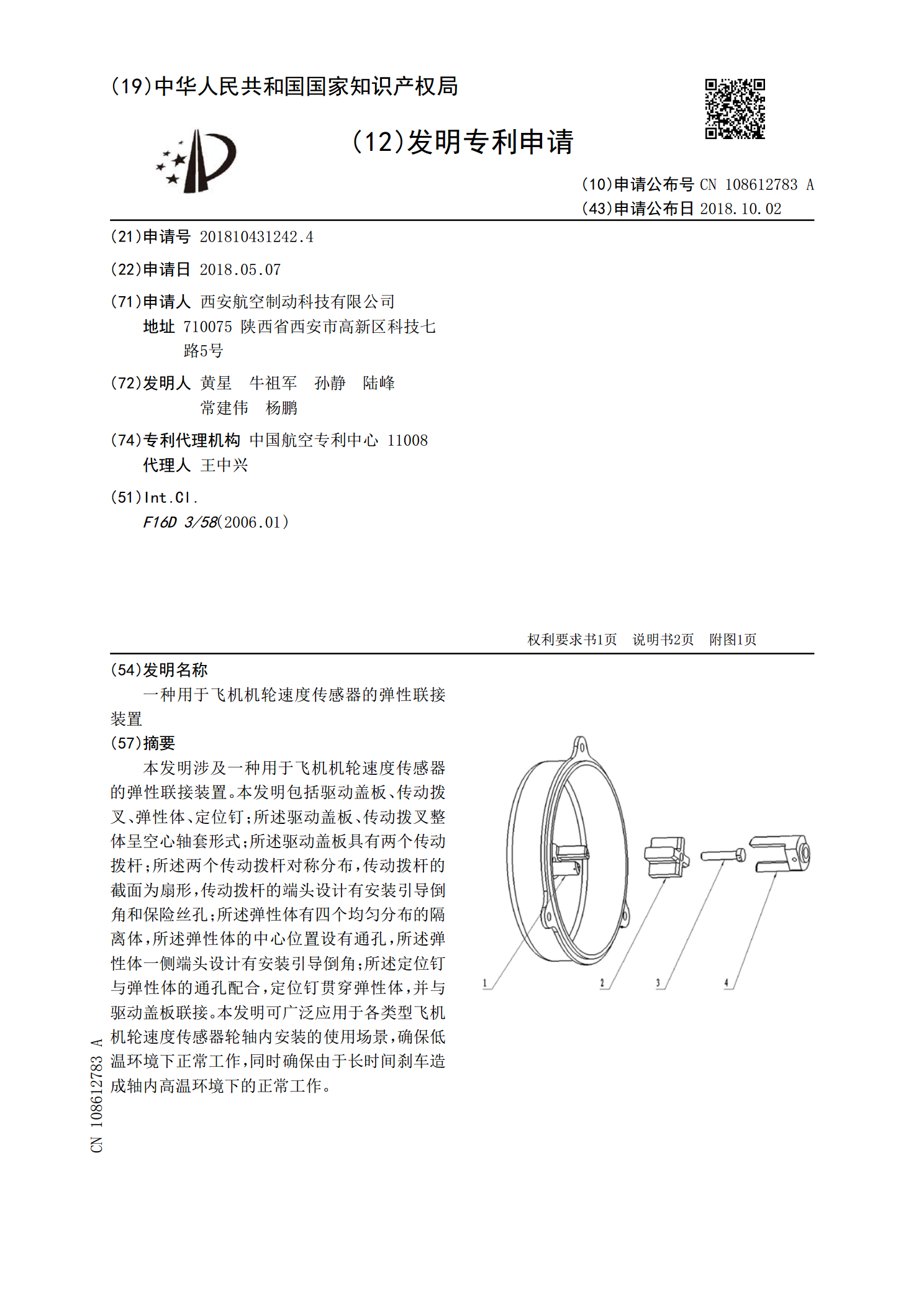
本发明涉及一种用于飞机机轮速度传感器的弹性联接装置。本发明包括驱动盖板、传动拨叉、弹性体、定位钉;所述驱动盖板、传动拨叉整体呈空心轴套形式;所述驱动盖板具有两个传动拨杆;所述两个传动拨杆对称分布,传动拨杆的截面为扇形,传动拨杆的端头设计有安装引导倒角和保险丝孔;所述弹性体有四个均匀分布的隔离体,所述弹性体的中心位置设有通孔,所述弹性体一侧端头设计有安装引导倒角;所述定位钉与弹性体的通孔配合,定位钉贯穿弹性体,并与驱动盖板联接。本发明可广泛应用于各类型飞机机轮速度传感器轮轴内安装的使用场景,确保低温环境下正