
一种双向齿轮传动假手.pdf

是你****嘉嘉

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种双向齿轮传动假手.pdf
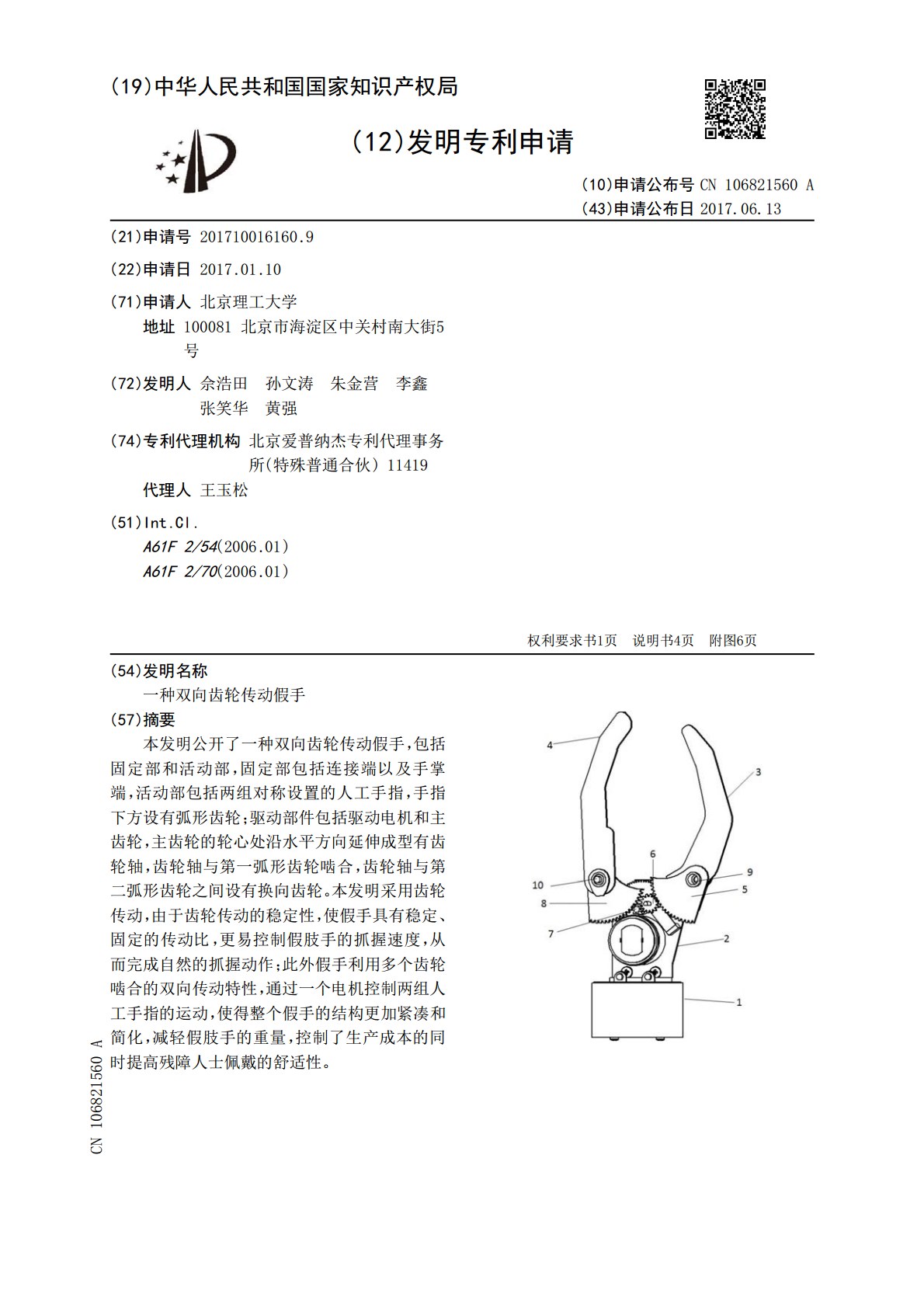
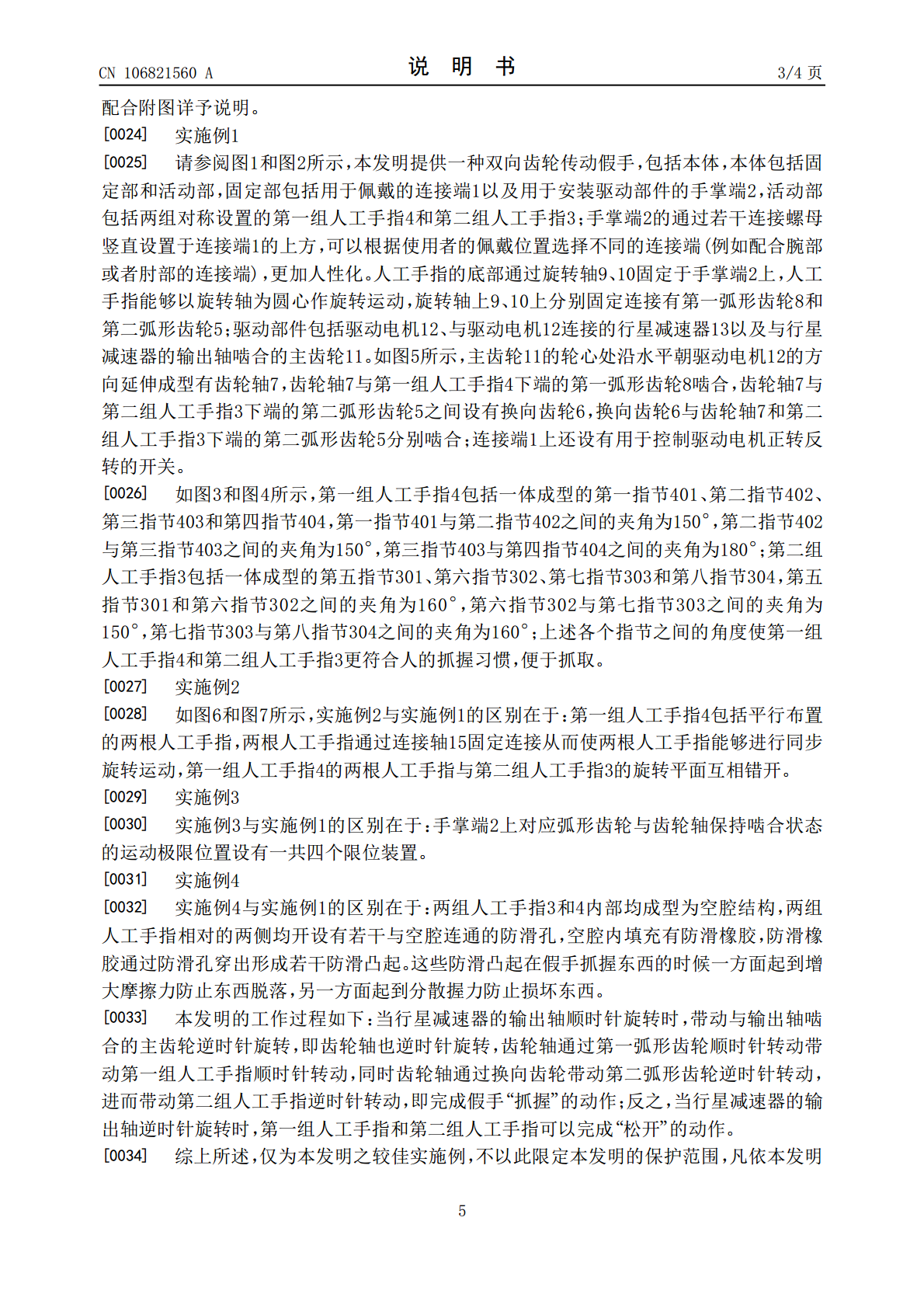
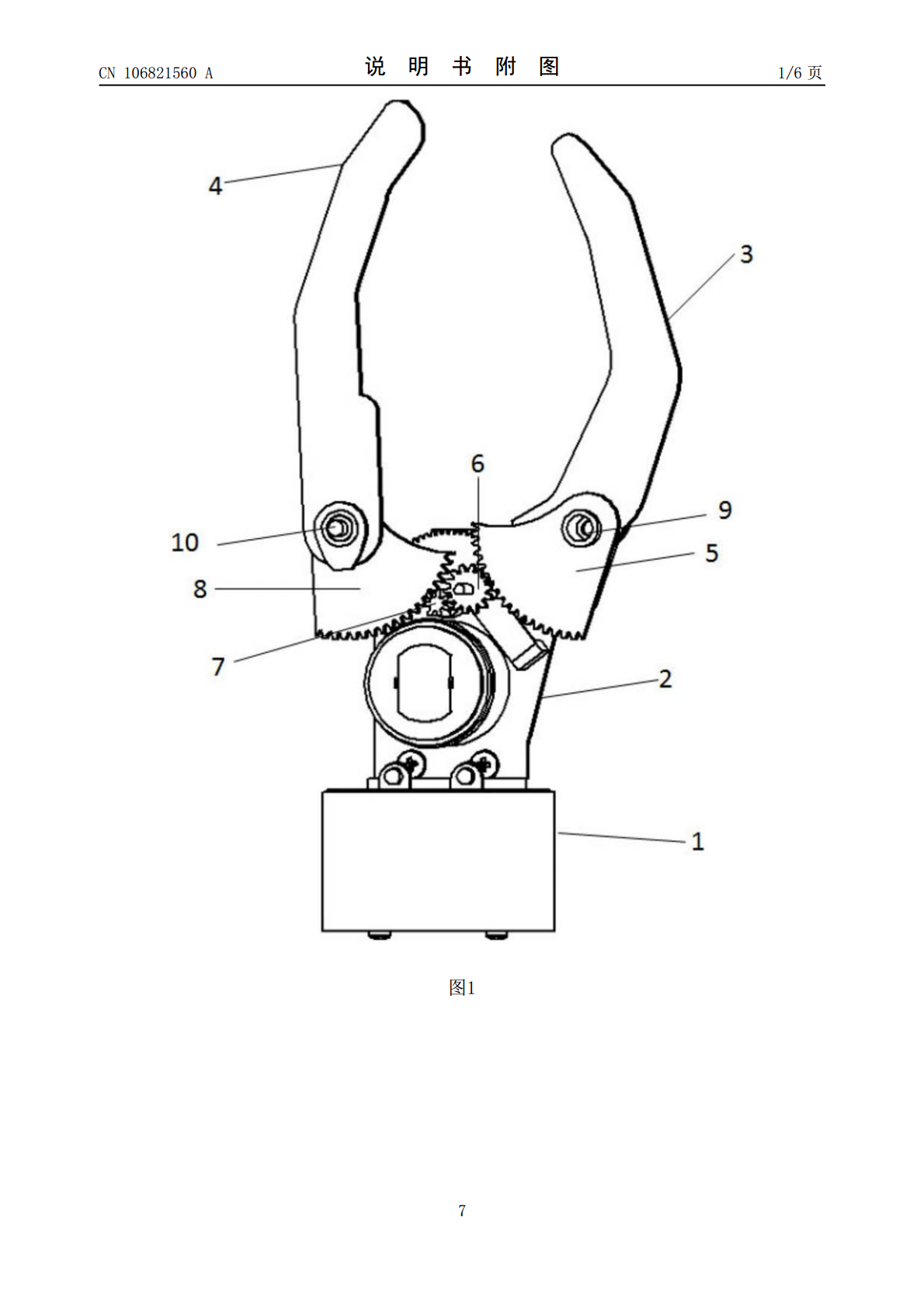
本发明公开了一种双向齿轮传动假手,包括固定部和活动部,固定部包括连接端以及手掌端,活动部包括两组对称设置的人工手指,手指下方设有弧形齿轮;驱动部件包括驱动电机和主齿轮,主齿轮的轮心处沿水平方向延伸成型有齿轮轴,齿轮轴与第一弧形齿轮啮合,齿轮轴与第二弧形齿轮之间设有换向齿轮。本发明采用齿轮传动,由于齿轮传动的稳定性,使假手具有稳定、固定的传动比,更易控制假肢手的抓握速度,从而完成自然的抓握动作;此外假手利用多个齿轮啮合的双向传动特性,通过一个电机控制两组人工手指的运动,使得整个假手的结构更加紧凑和简化,减轻
双向缓冲传动齿轮.pdf
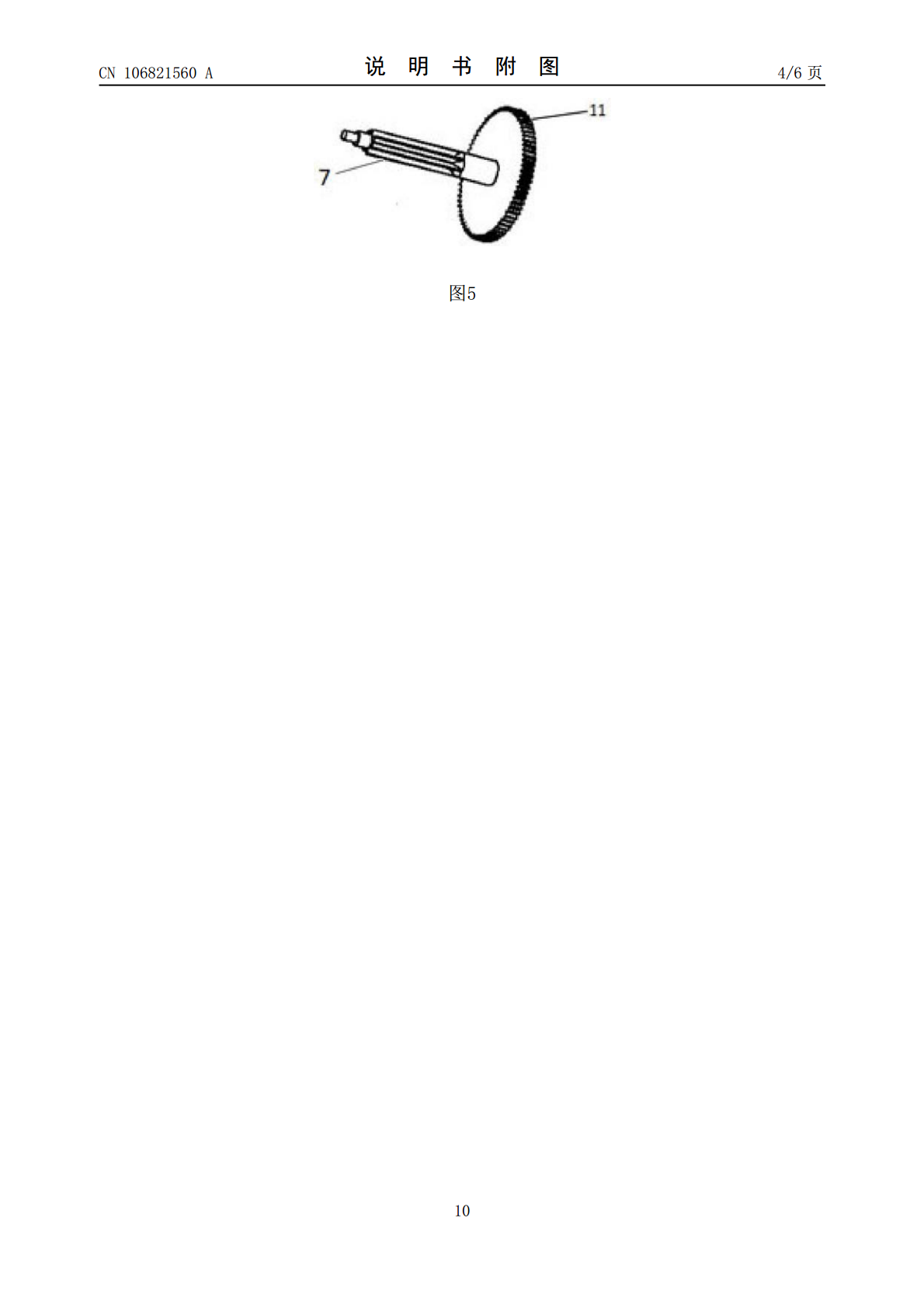
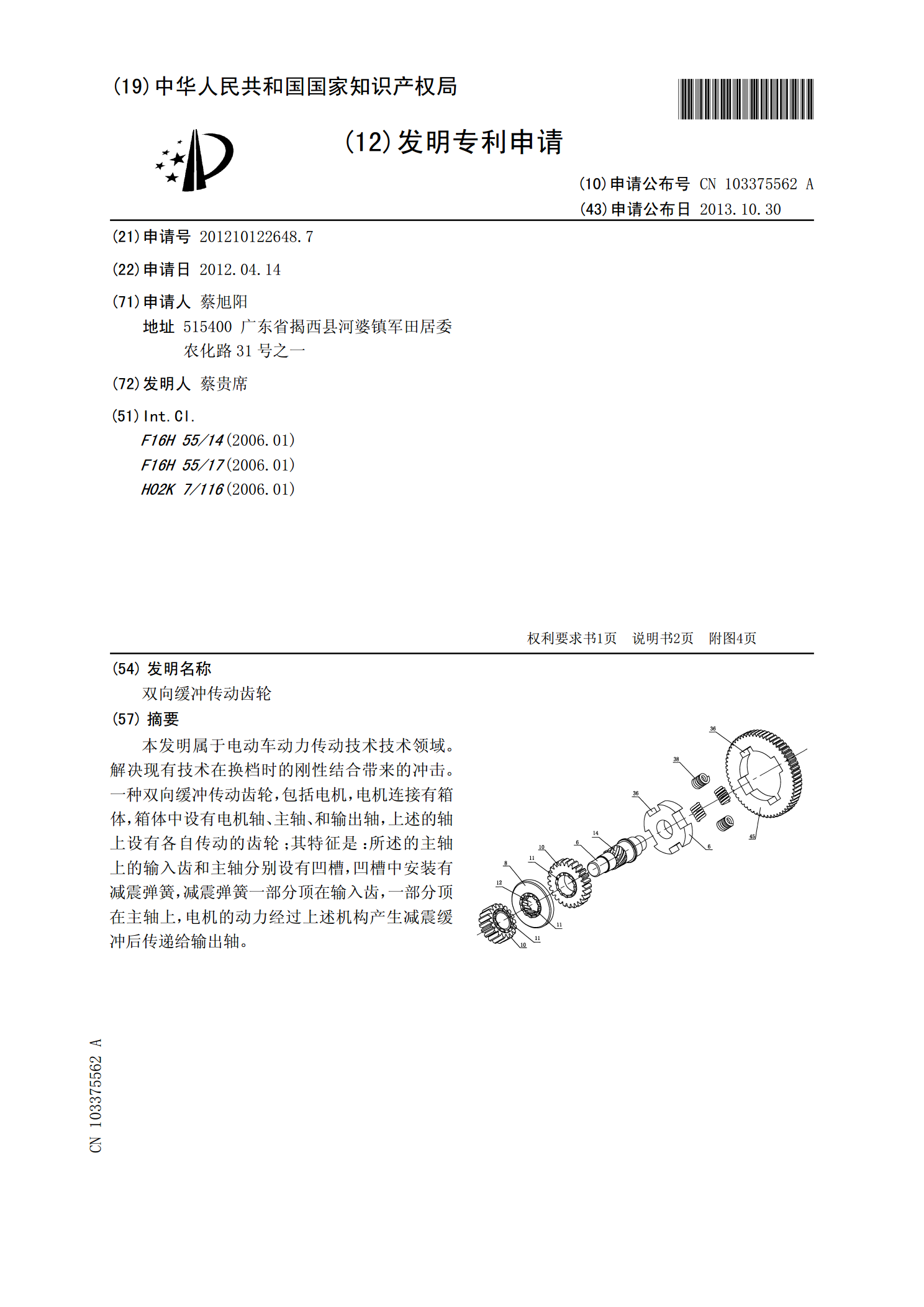
本发明属于电动车动力传动技术技术领域。解决现有技术在换档时的刚性结合带来的冲击。一种双向缓冲传动齿轮,包括电机,电机连接有箱体,箱体中设有电机轴、主轴、和输出轴,上述的轴上设有各自传动的齿轮;其特征是:所述的主轴上的输入齿和主轴分别设有凹槽,凹槽中安装有减震弹簧,减震弹簧一部分顶在输入齿,一部分顶在主轴上,电机的动力经过上述机构产生减震缓冲后传递给输出轴。

双向缓冲传动齿轮.pdf
本发明属于电动车动力传动技术技术领域。解决现有技术在换档时的刚性结合带来的冲击。一种双向缓冲传动齿轮,包括电机,电机连接有箱体,箱体中设有电机轴、主轴、和输出轴,上述的轴上设有各自传动的齿轮;其特征是:所述的主轴上的输入齿和主轴分别设有凹槽,凹槽中安装有减震弹簧,减震弹簧一部分顶在输入齿,一部分顶在主轴上,电机的动力经过上述机构产生减震缓冲后传递给输出轴。
一种齿轮传动双向倍增伸缩装置.pdf
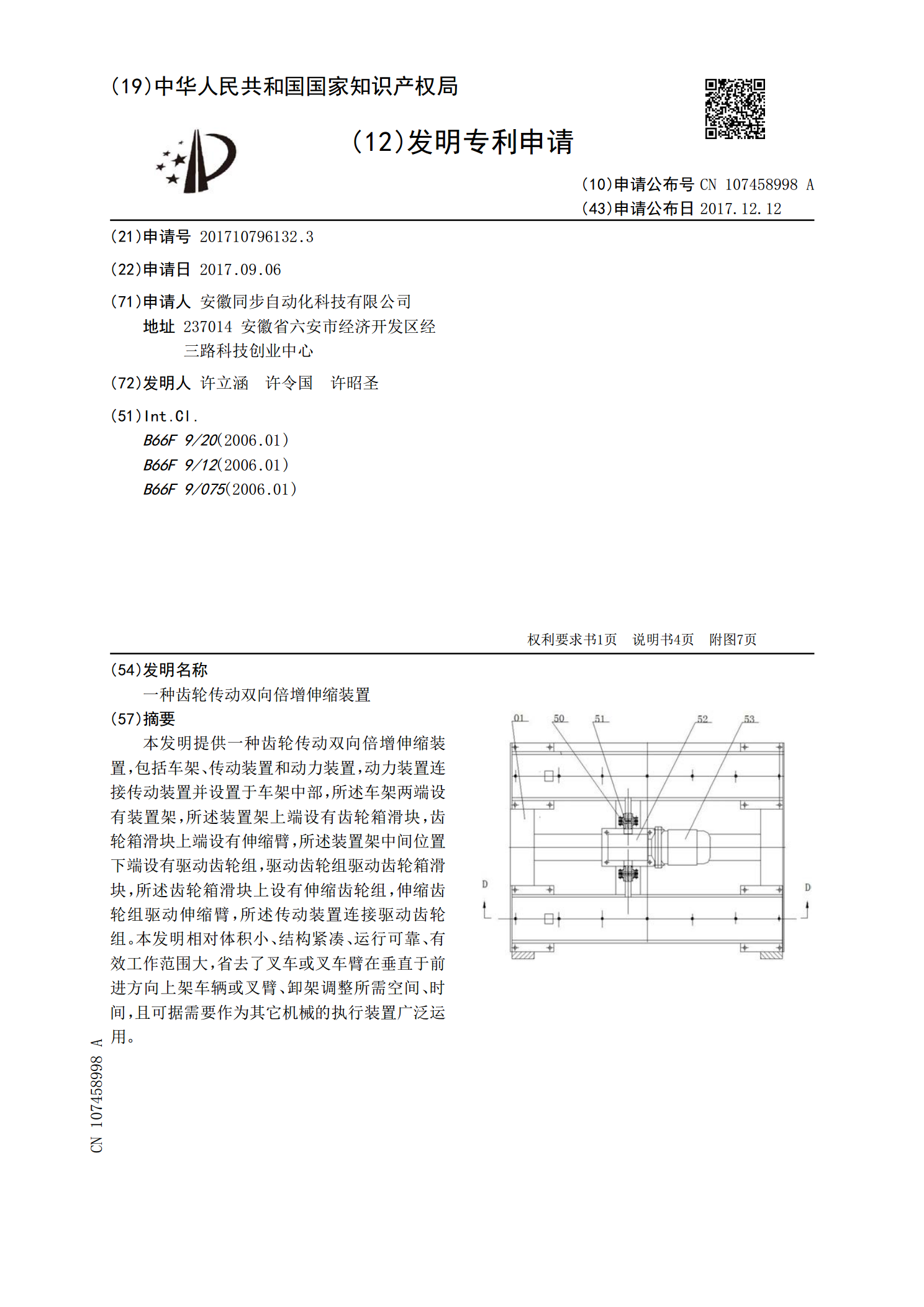
本发明提供一种齿轮传动双向倍增伸缩装置,包括车架、传动装置和动力装置,动力装置连接传动装置并设置于车架中部,所述车架两端设有装置架,所述装置架上端设有齿轮箱滑块,齿轮箱滑块上端设有伸缩臂,所述装置架中间位置下端设有驱动齿轮组,驱动齿轮组驱动齿轮箱滑块,所述齿轮箱滑块上设有伸缩齿轮组,伸缩齿轮组驱动伸缩臂,所述传动装置连接驱动齿轮组。本发明相对体积小、结构紧凑、运行可靠、有效工作范围大,省去了叉车或叉车臂在垂直于前进方向上架车辆或叉臂、卸架调整所需空间、时间,且可据需要作为其它机械的执行装置广泛运用。

一种基于齿轮传动的双向离合器.pdf
本发明属于离合器技术领域,尤其涉及一种基于齿轮传动的双向离合器,它包括输出轴、传动机构、安装外壳、输入轴、驱动条、安装内壳,当本发明设计的离合器的输入轴转动时;输入轴会带动两个驱动齿轮中其中一个驱动齿轮转动;驱动齿轮转动会分别带动第四齿轮和第五齿轮转动;第四齿轮和第五齿轮转动就会使得三个驱动条对应的六个挤压弧板挤压三个驱动条;当挤压块对驱动条的夹紧力大于输出轴上的负载时;通过两个挤压块对驱动条的夹紧力就会带动驱动条绕着输入轴轴线转动;进而带动安装外壳转动;安装外壳转动带动输出轴转动;即输入轴就会带动输出轴