
一种轮腿式3‑PUU并联移动机器人.pdf

佳晨****ng


1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮腿式3‑PUU并联移动机器人.pdf
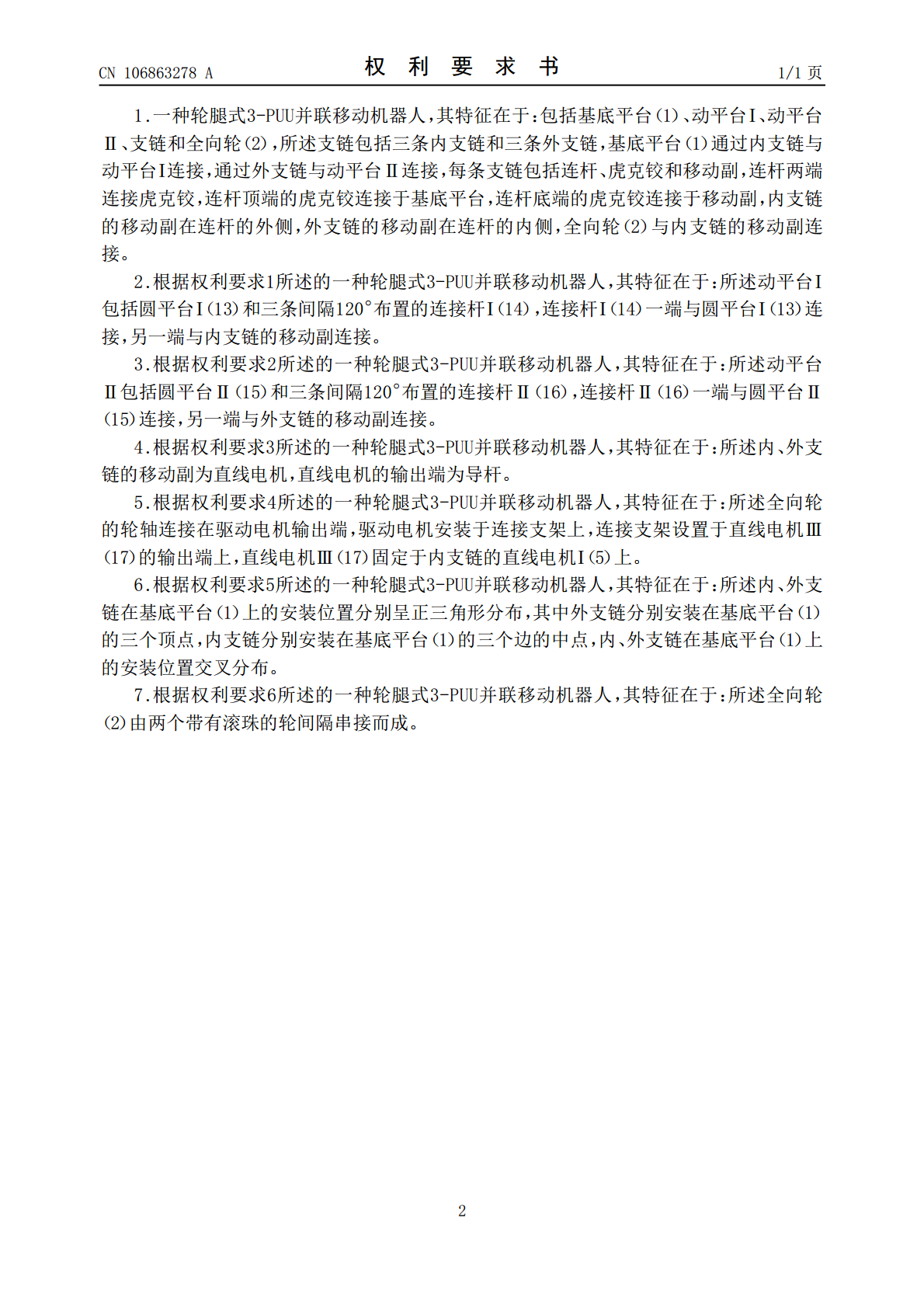
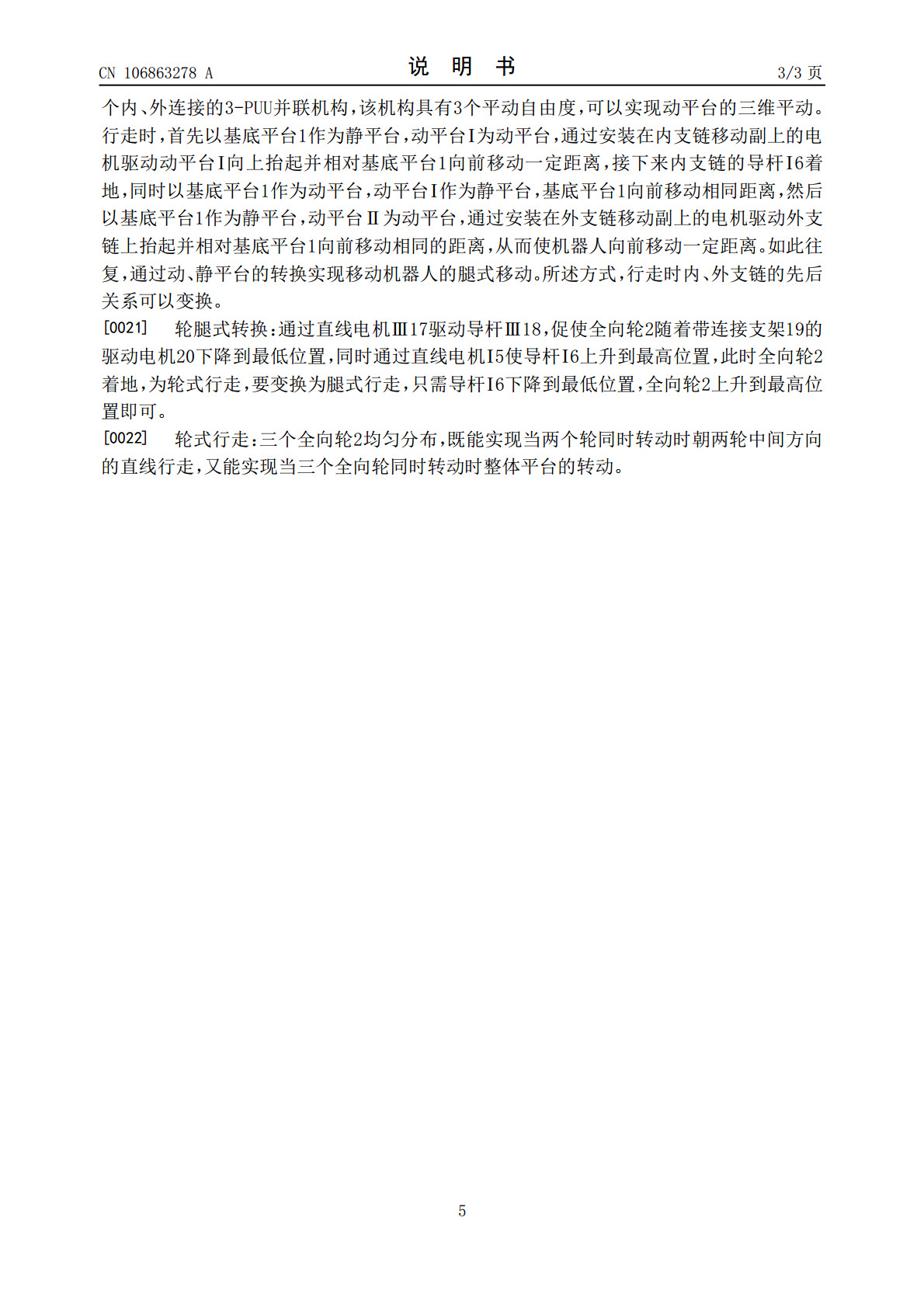
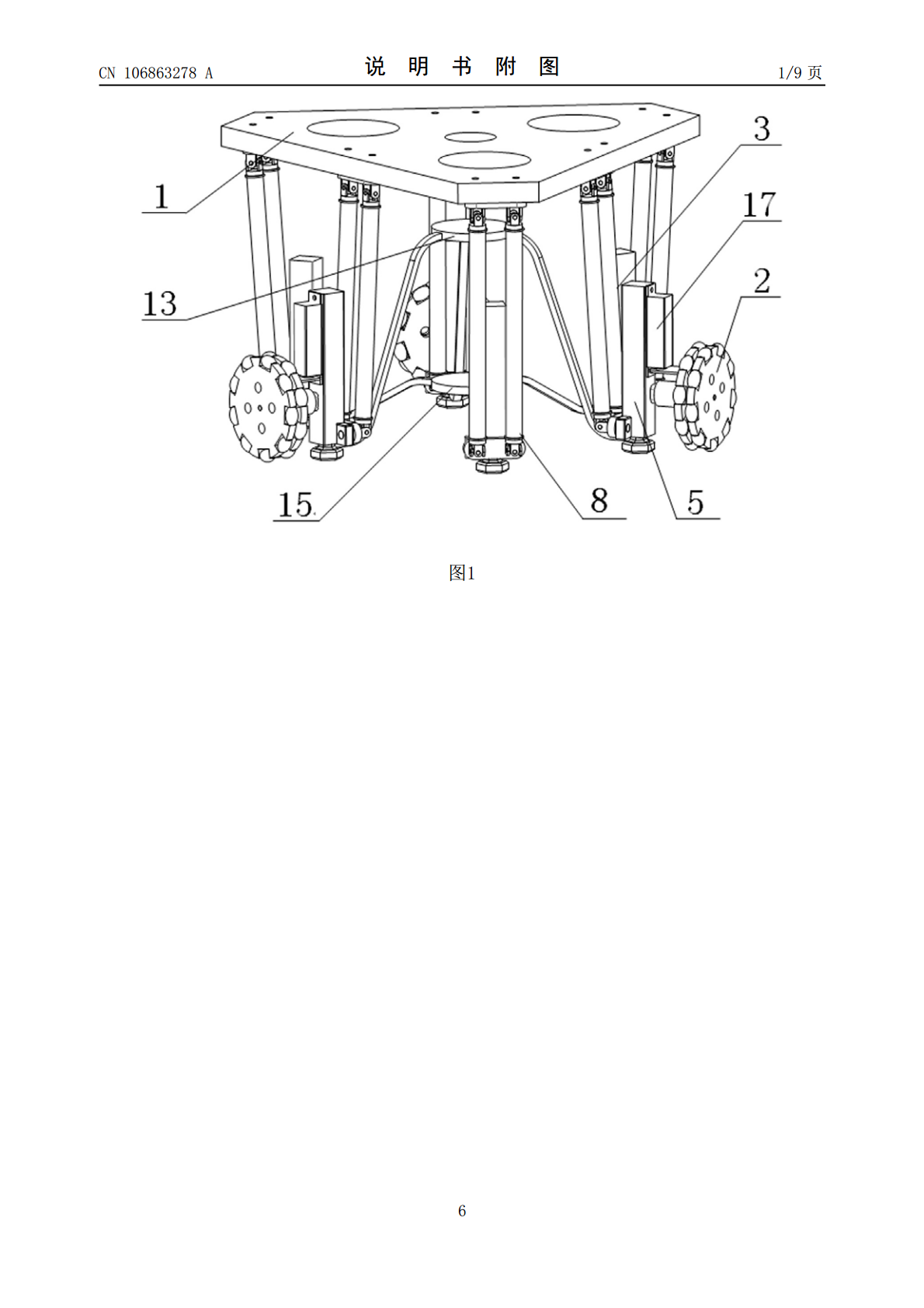
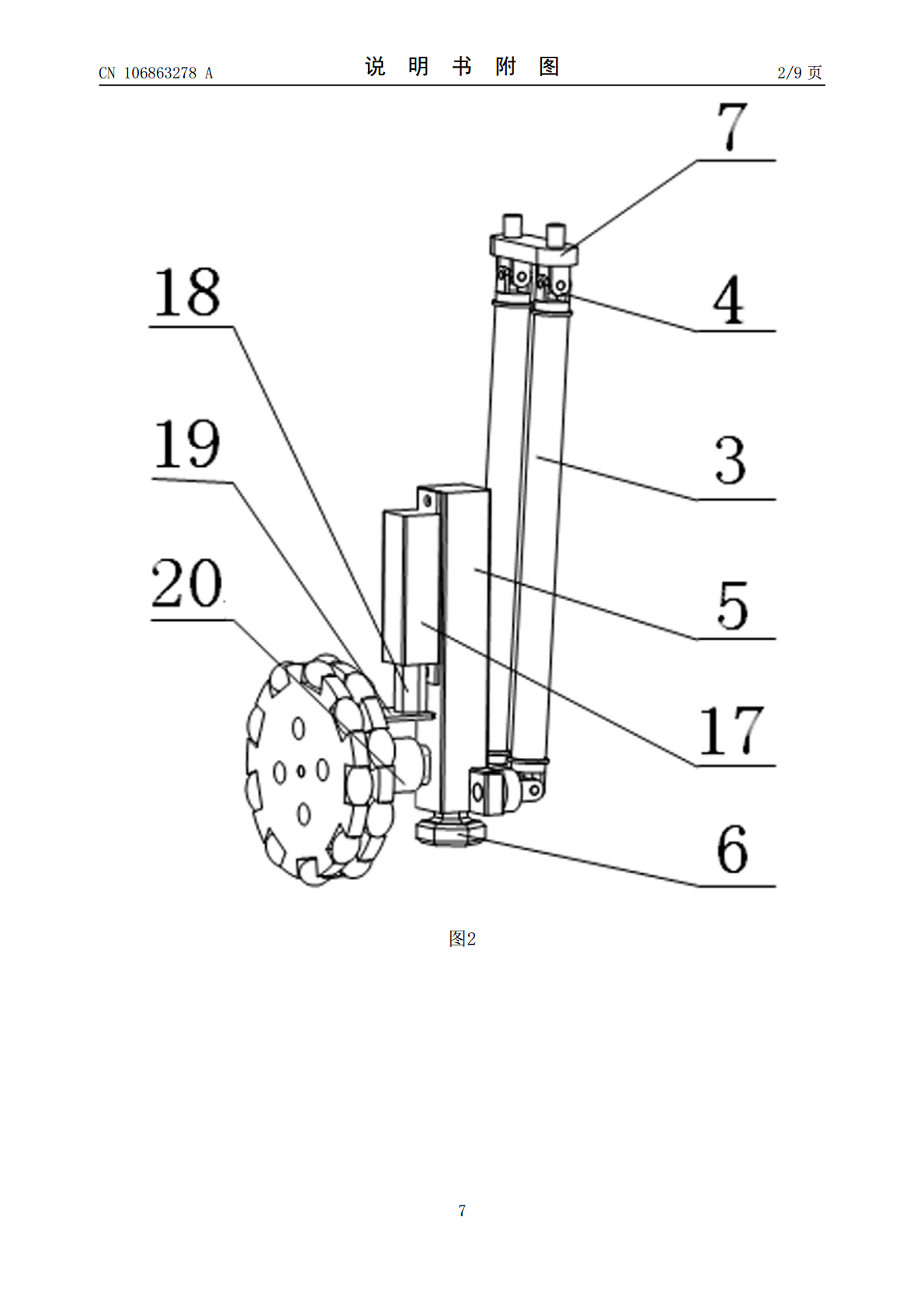
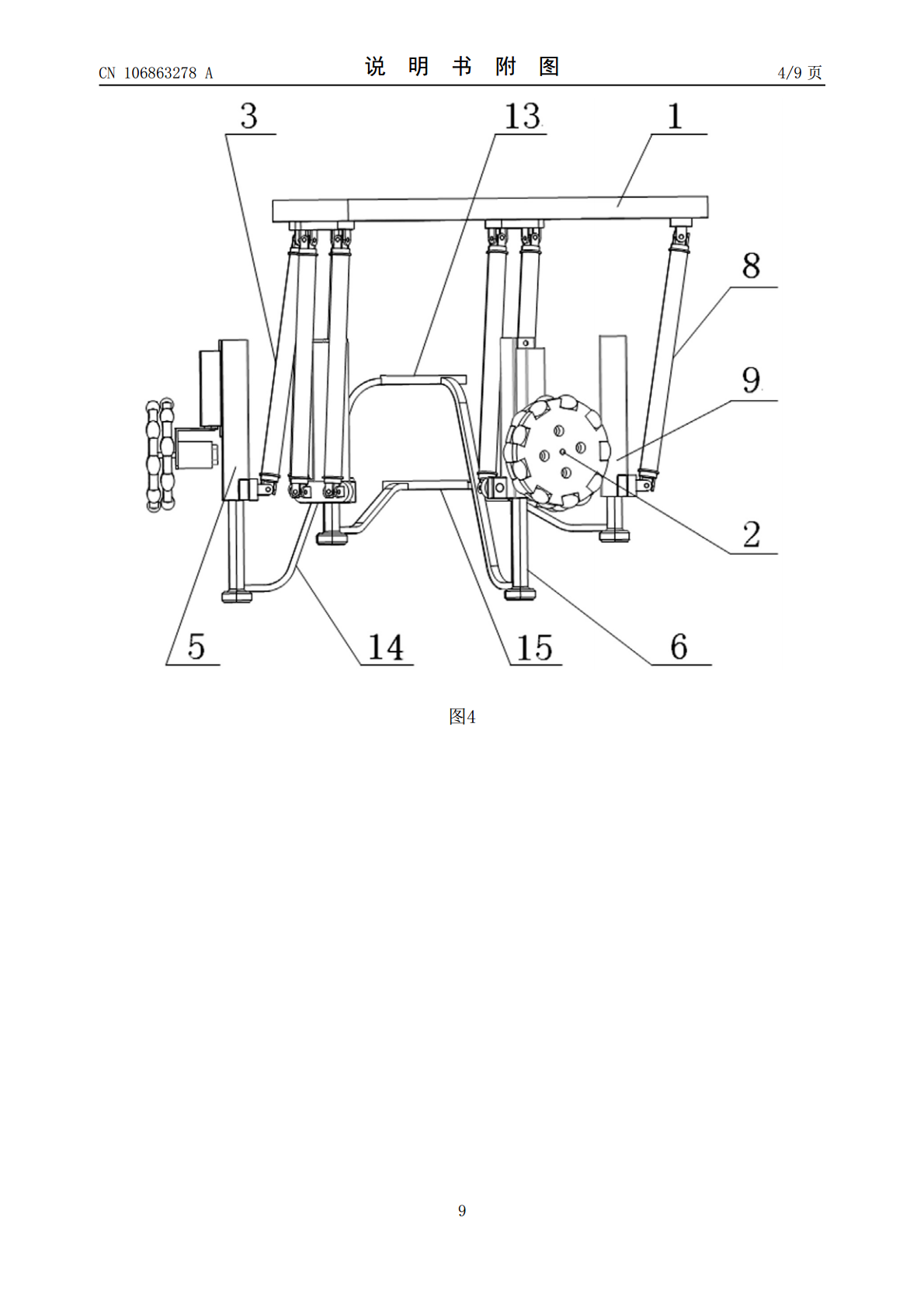
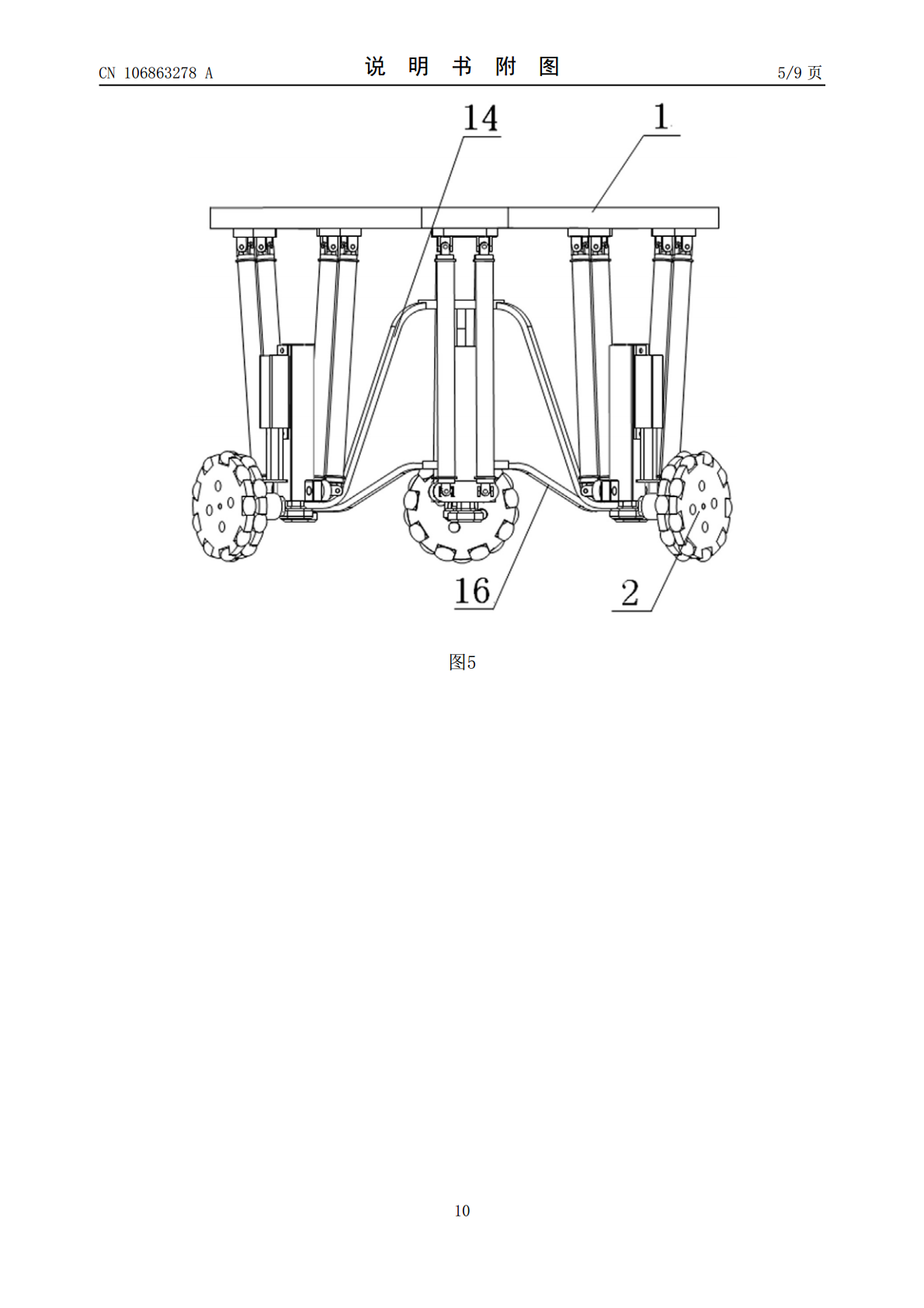
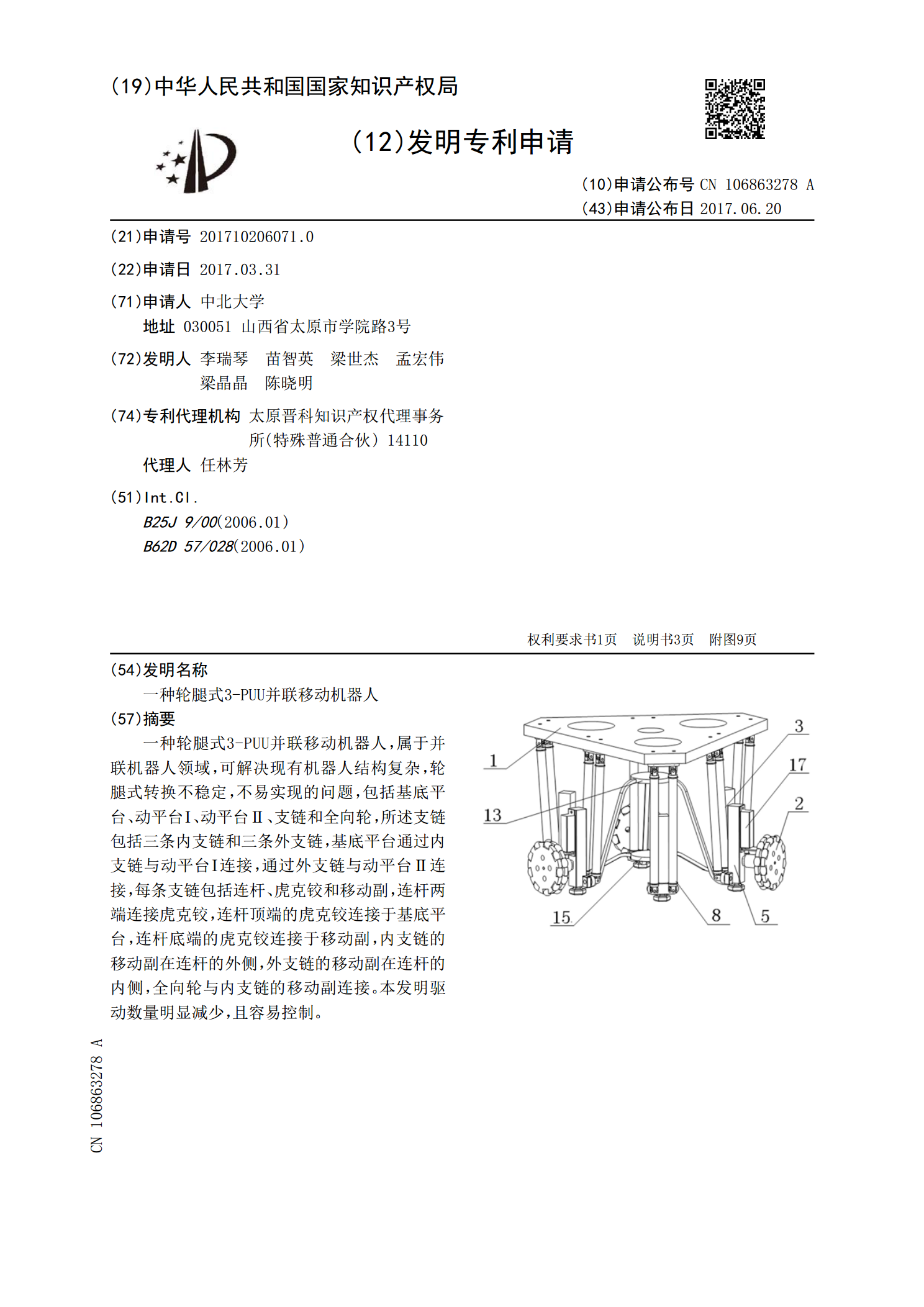
一种轮腿式3‑PUU并联移动机器人,属于并联机器人领域,可解决现有机器人结构复杂,轮腿式转换不稳定,不易实现的问题,包括基底平台、动平台Ⅰ、动平台Ⅱ、支链和全向轮,所述支链包括三条内支链和三条外支链,基底平台通过内支链与动平台Ⅰ连接,通过外支链与动平台Ⅱ连接,每条支链包括连杆、虎克铰和移动副,连杆两端连接虎克铰,连杆顶端的虎克铰连接于基底平台,连杆底端的虎克铰连接于移动副,内支链的移动副在连杆的外侧,外支链的移动副在连杆的内侧,全向轮与内支链的移动副连接。本发明驱动数量明显减少,且容易控制。
基于球面并联机构的轮腿式移动机器人.pdf
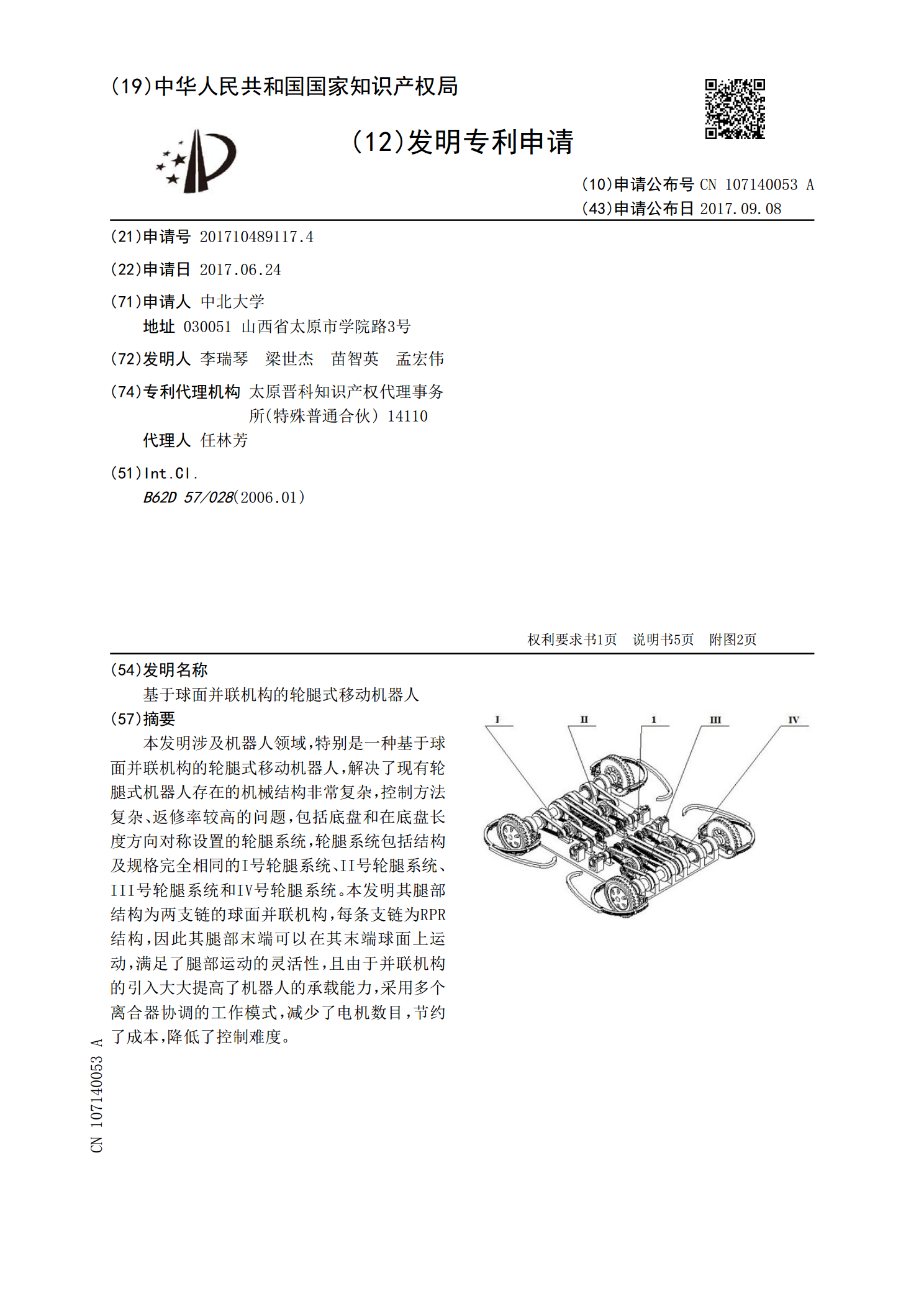
本发明涉及机器人领域,特别是一种基于球面并联机构的轮腿式移动机器人,解决了现有轮腿式机器人存在的机械结构非常复杂,控制方法复杂、返修率较高的问题,包括底盘和在底盘长度方向对称设置的轮腿系统,轮腿系统包括结构及规格完全相同的I号轮腿系统、II号轮腿系统、III号轮腿系统和IV号轮腿系统。本发明其腿部结构为两支链的球面并联机构,每条支链为RPR结构,因此其腿部末端可以在其末端球面上运动,满足了腿部运动的灵活性,且由于并联机构的引入大大提高了机器人的承载能力,采用多个离合器协调的工作模式,减少了电机数目,节约了
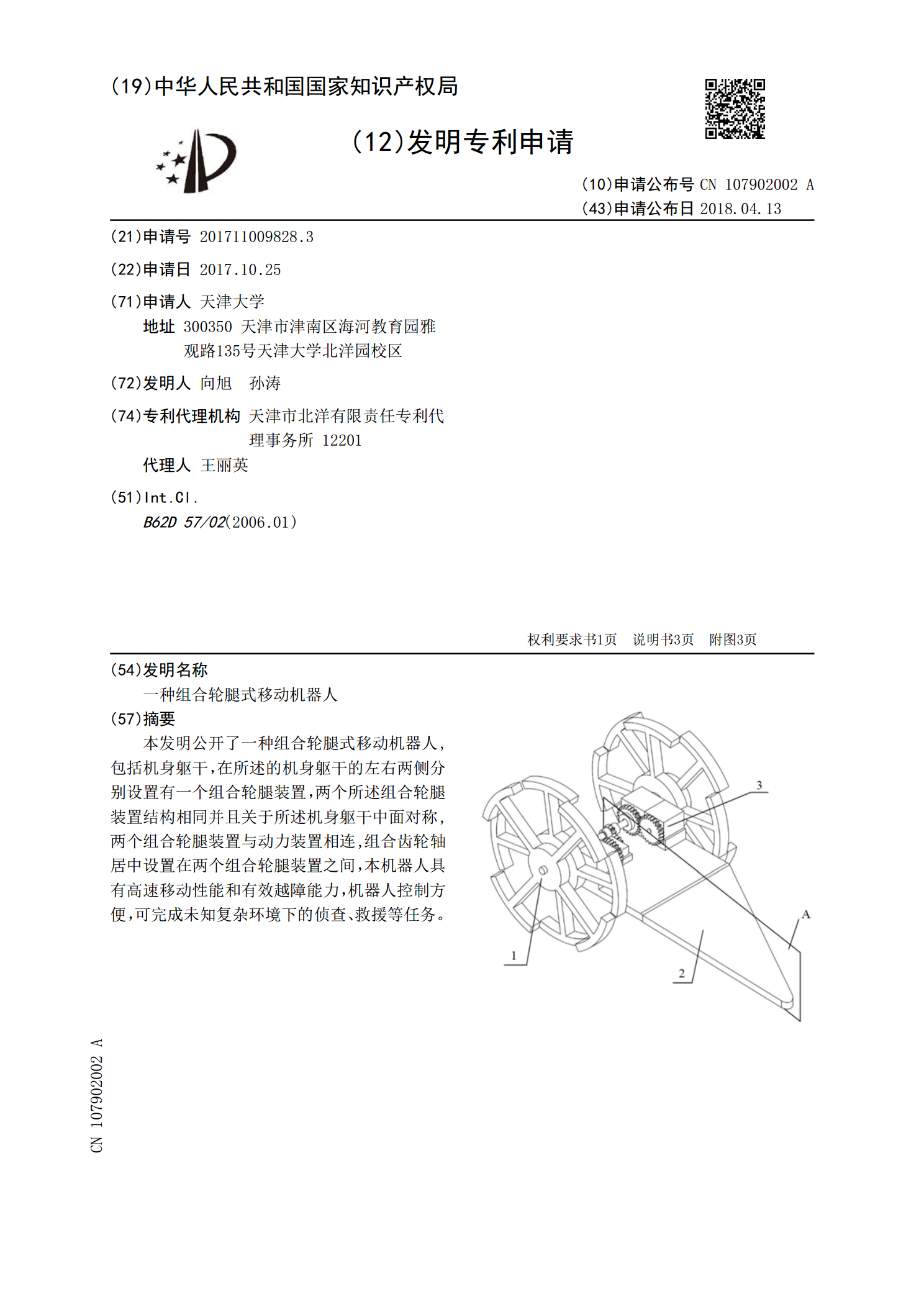
一种组合轮腿式移动机器人.pdf
本发明公开了一种组合轮腿式移动机器人,包括机身躯干,在所述的机身躯干的左右两侧分别设置有一个组合轮腿装置,两个所述组合轮腿装置结构相同并且关于所述机身躯干中面对称,两个组合轮腿装置与动力装置相连,组合齿轮轴居中设置在两个组合轮腿装置之间,本机器人具有高速移动性能和有效越障能力,机器人控制方便,可完成未知复杂环境下的侦查、救援等任务。

小型轮腿式移动机器人.pdf
小型轮腿式移动机器人,属于移动机器人领域。四个腿‑机体连接件可拆卸固定在底板上,每个腿‑机体连接件上可拆卸固定有一个腿部,四个腿部相对于底板十字中心线对称设置,两个关节基座均可拆卸固定在底板上,每个关节与对应的关节基座可拆卸固定连接,两个关节相对于底板的中心对称设置;电路板支撑件可拆卸固定在底板上,电路板可拆卸固定在电路板支撑件上,每个轮组中的轮子环套装在相对应的关节的关节输出外壳的外侧,轮组中的轮子与关节的关节输出外壳可拆卸固定连接。本发明结构简单,并具有抗倾覆性、自动复位、运动灵活、爬坡越障能力优越的
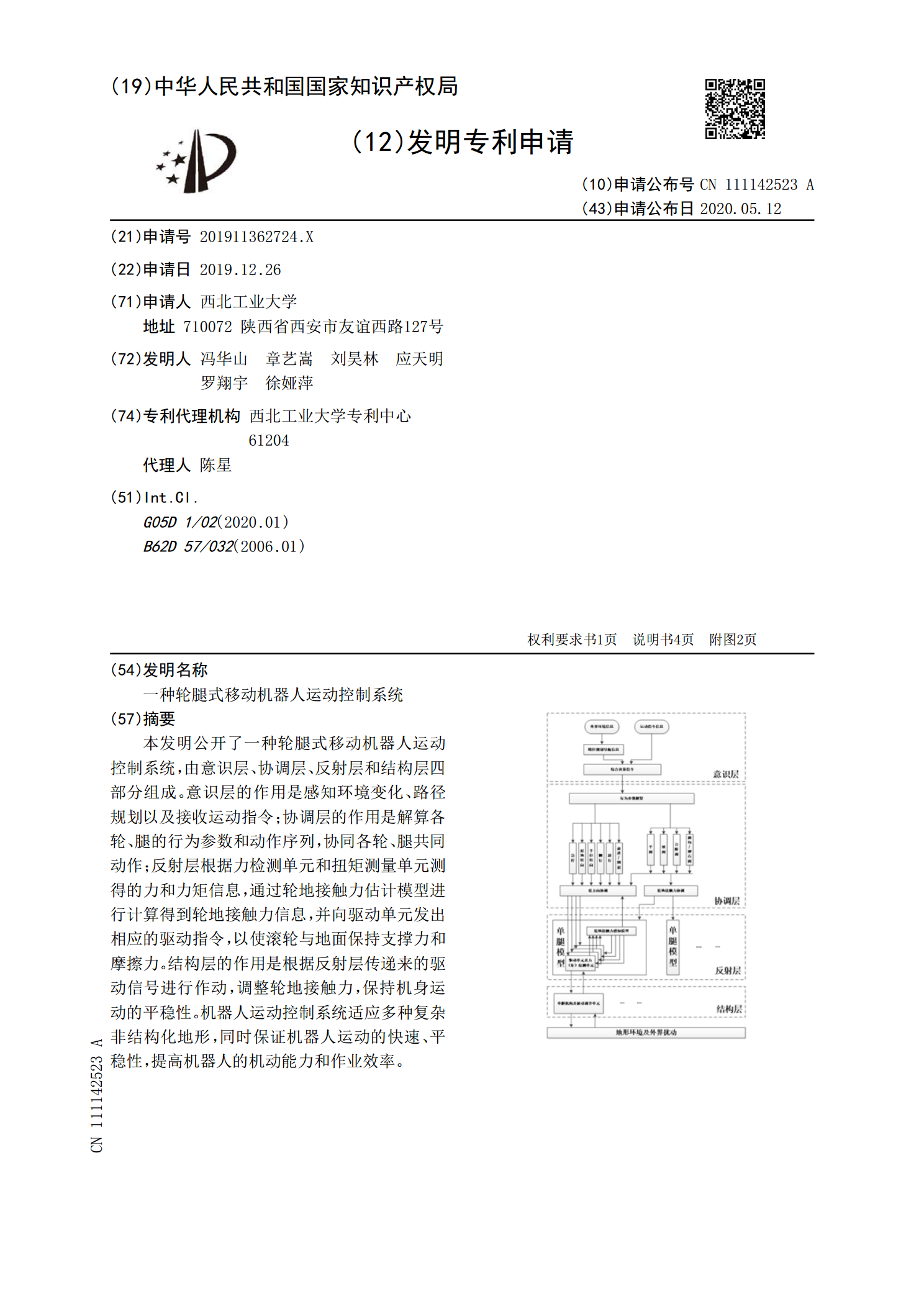
一种轮腿式移动机器人运动控制系统.pdf
本发明公开了一种轮腿式移动机器人运动控制系统,由意识层、协调层、反射层和结构层四部分组成。意识层的作用是感知环境变化、路径规划以及接收运动指令;协调层的作用是解算各轮、腿的行为参数和动作序列,协同各轮、腿共同动作;反射层根据力检测单元和扭矩测量单元测得的力和力矩信息,通过轮地接触力估计模型进行计算得到轮地接触力信息,并向驱动单元发出相应的驱动指令,以使滚轮与地面保持支撑力和摩擦力。结构层的作用是根据反射层传递来的驱动信号进行作动,调整轮地接触力,保持机身运动的平稳性。机器人运动控制系统适应多种复杂非结构化