
一种可调双足杆仿生单足轮.pdf

书生****ma


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可调双足杆仿生单足轮.pdf
一种可调双足杆仿生单足轮,它包括安装架、液压马达、驱动齿轮、从动齿轮、偏心轴、偏心设置的主动轮腿和从动轮腿、足杆单元。通过液压马达的驱动,由驱动齿轮带动从动齿轮转动,从动齿轮固定在主动轮腿上,带动主动轮腿转动,主动轮腿通过铰接轴、连接件以及足杆安装座,带动从动轮腿转动,进而带动足杆转动,实现行走功能。本发明提供的主动轮腿以及从动轮腿通过液压马达所提供的动力,能够实现旋转式行走,也可以实现同动物一样往复步进移动。同时,足杆单元上的伺服电机工作,通过锥齿轮组,带动两侧足杆安装座以及足杆安装轴转动,使两足杆形成
一种可调双足杆多足轮.pdf
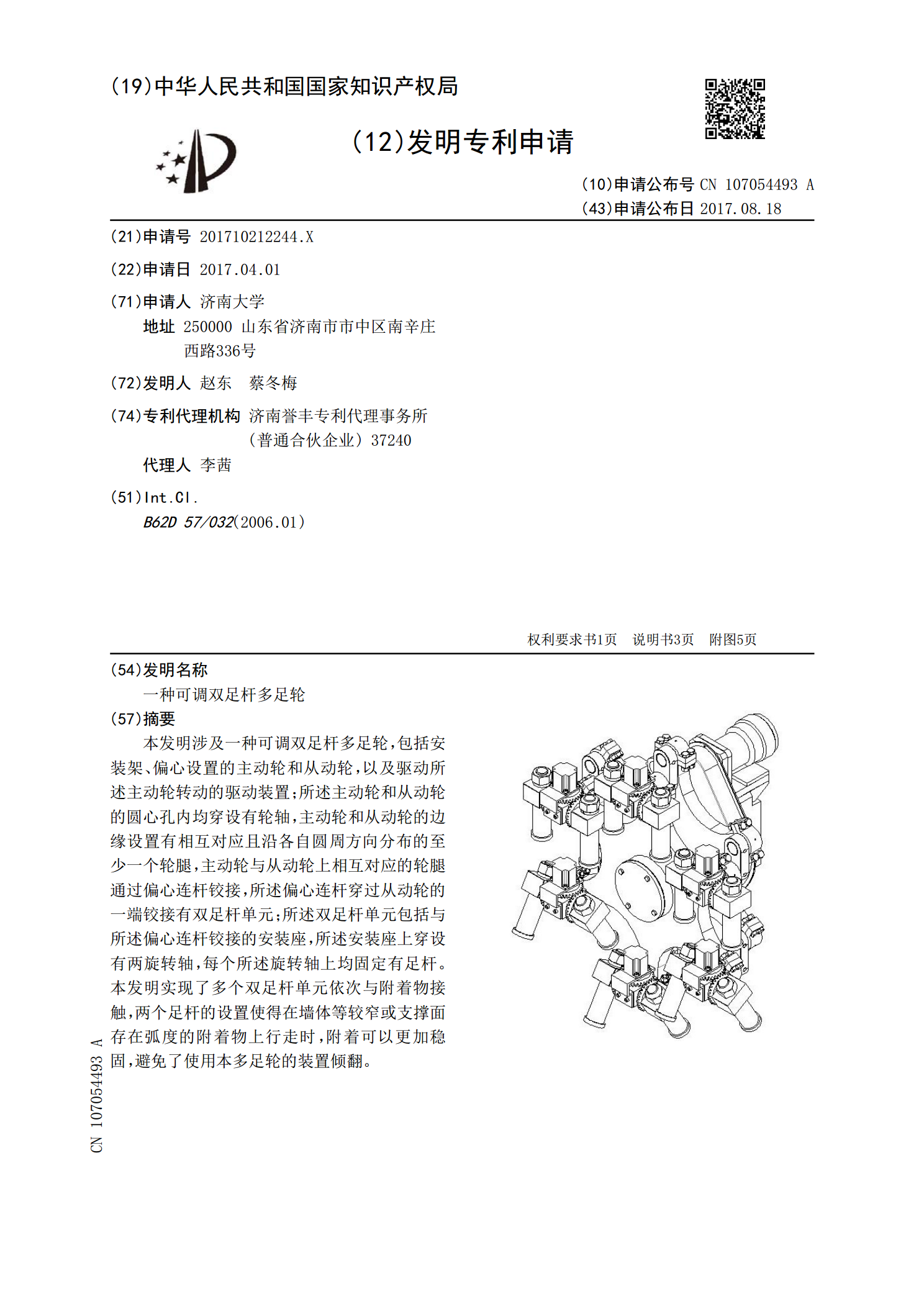
本发明涉及一种可调双足杆多足轮,包括安装架、偏心设置的主动轮和从动轮,以及驱动所述主动轮转动的驱动装置;所述主动轮和从动轮的圆心孔内均穿设有轮轴,主动轮和从动轮的边缘设置有相互对应且沿各自圆周方向分布的至少一个轮腿,主动轮与从动轮上相互对应的轮腿通过偏心连杆铰接,所述偏心连杆穿过从动轮的一端铰接有双足杆单元;所述双足杆单元包括与所述偏心连杆铰接的安装座,所述安装座上穿设有两旋转轴,每个所述旋转轴上均固定有足杆。本发明实现了多个双足杆单元依次与附着物接触,两个足杆的设置使得在墙体等较窄或支撑面存在弧度的附着

一种新型单足杆多足轮.pdf
一种新型单足杆多足轮,通过对多足轮结构的重新设计及创新,改善现有多足轮结构复杂,运转平稳性能差,所能承载的平台重量有限,结构性能较差等方面的不足。它包括安装架、液压马达、驱动齿轮、从动齿轮、偏心轴、偏心设置的主动轮和从动轮、足杆、足杆安装座、连接件、铰接轴。所述的足杆安装架,中间开有圆锥孔,用以配合足杆上端的圆锥面,使所述足杆以及足杆安装座能够承受更大的作用力。所述主动轮和从动轮通过偏心轴连接,构成偏心轮组,通过偏心设置的主动轮和从动轮的转动,使得所述足杆始终处于下垂状态,实现足杆着地行走功能。

一种新型长足可调双足杆多足轮.pdf
一种新型长足可调双足杆多足轮,它包括安装架、偏心设置的主动轮和从动轮,长足双足杆单元,以及固定于所述安装架上并驱动所述主动轮转动的驱动装置。针对现有多足轮结构的不足,对主动轮、从动轮以及足杆进行了优化创新,主动轮和从动轮边缘设置有相互对应且沿各自圆周方向均匀分布的三个轮腿,轮腿中间较粗,能够满足工作时所承受的较大作用力的要求,即减轻了重量,又能够满足本发明所述长足杆的使用。本发明长足杆增加了现有多足轮足杆的长度,配合本发明多足轮使用,增强了实用性。

一种仿生越障的双足跳跃机械装置.pdf
本发明公开了一种仿生越障的双足跳跃机械装置,包括下肢跳跃机构,上肢抓取机构,主体结构和惯性摆机构以及传动机构。其中,上肢抓取机构和下肢跳跃机构共同连接在机器人主体结构上。所述下肢跳跃机构为对称结构,通过曲柄连杆与传动机构连接,可完成腿部机构的伸展和压缩运动。所述上肢抓取机构,与下肢跳跃机构类似,上肢抓取机构在下肢跳跃时起到辅助作用,使机器人下肢可以完成两次蓄力跳跃。所述传动机构内嵌于主体结构中,通过齿轮和传动轴将动力传递至双足机器人各执行构件处。所述惯性摆机构起到在空中平衡跳跃机器人姿态的作用。本发明所述