
一种红外图像序列显著性检测方法.pdf

海昌****姐淑


1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种红外图像序列显著性检测方法.pdf
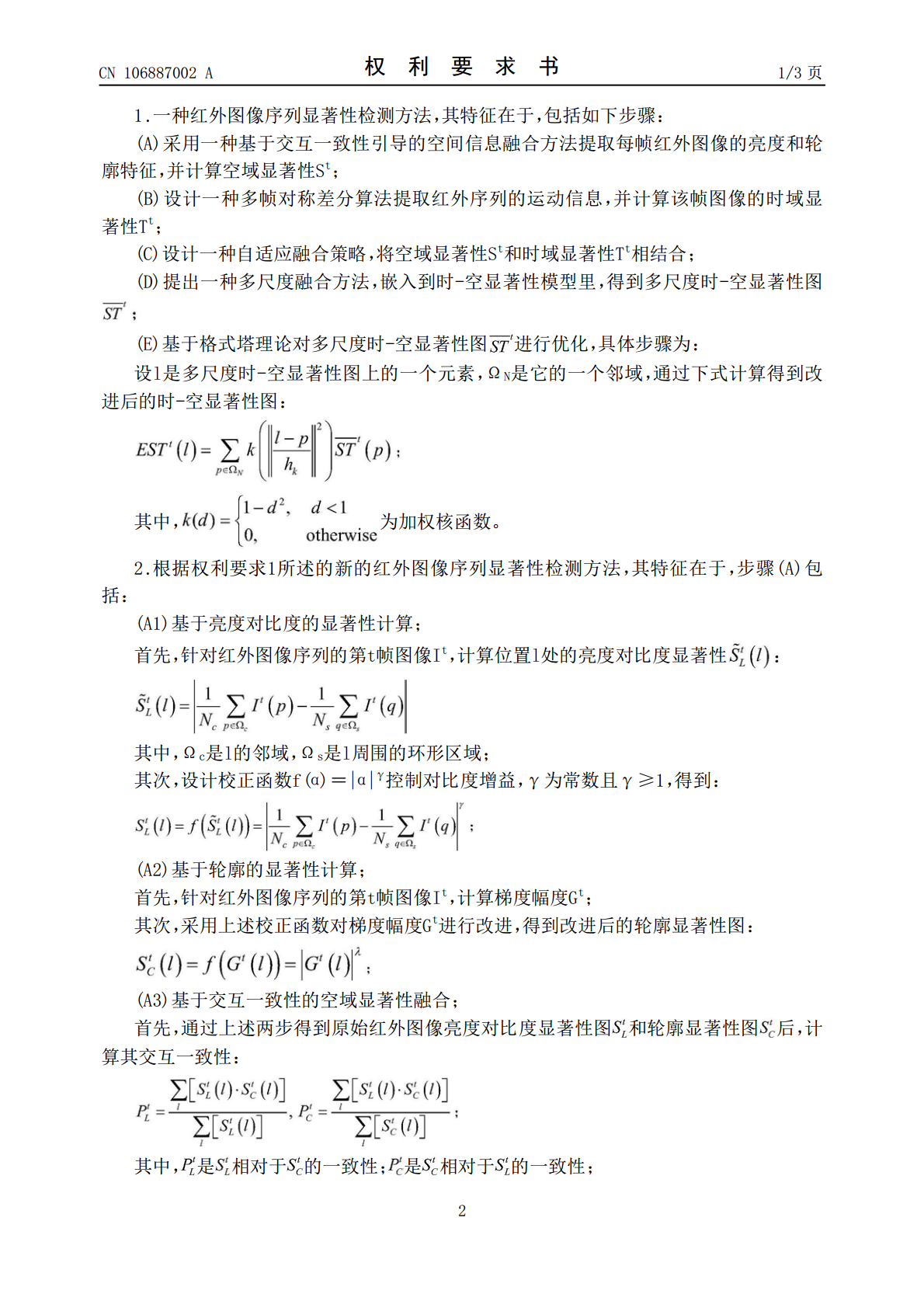
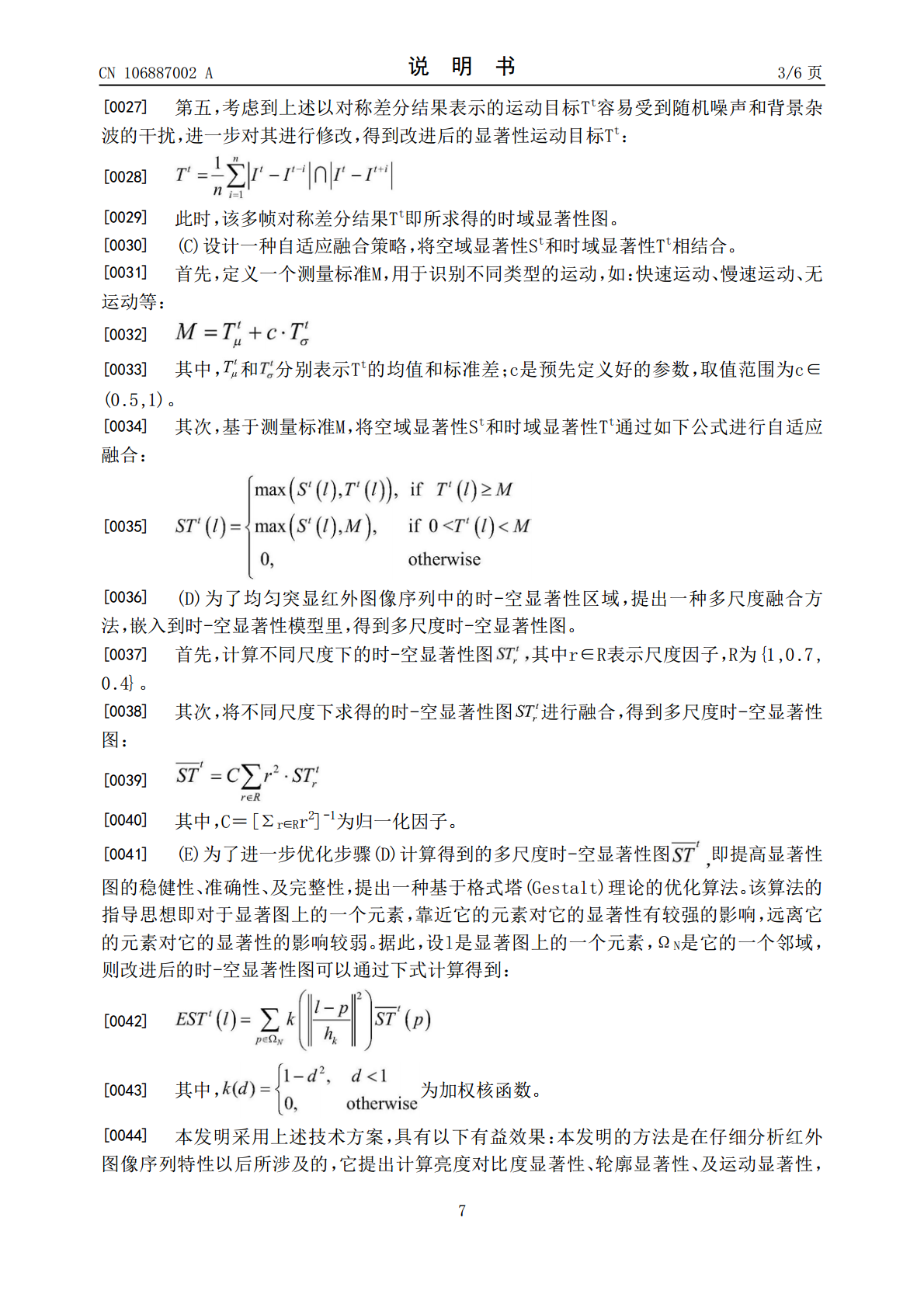
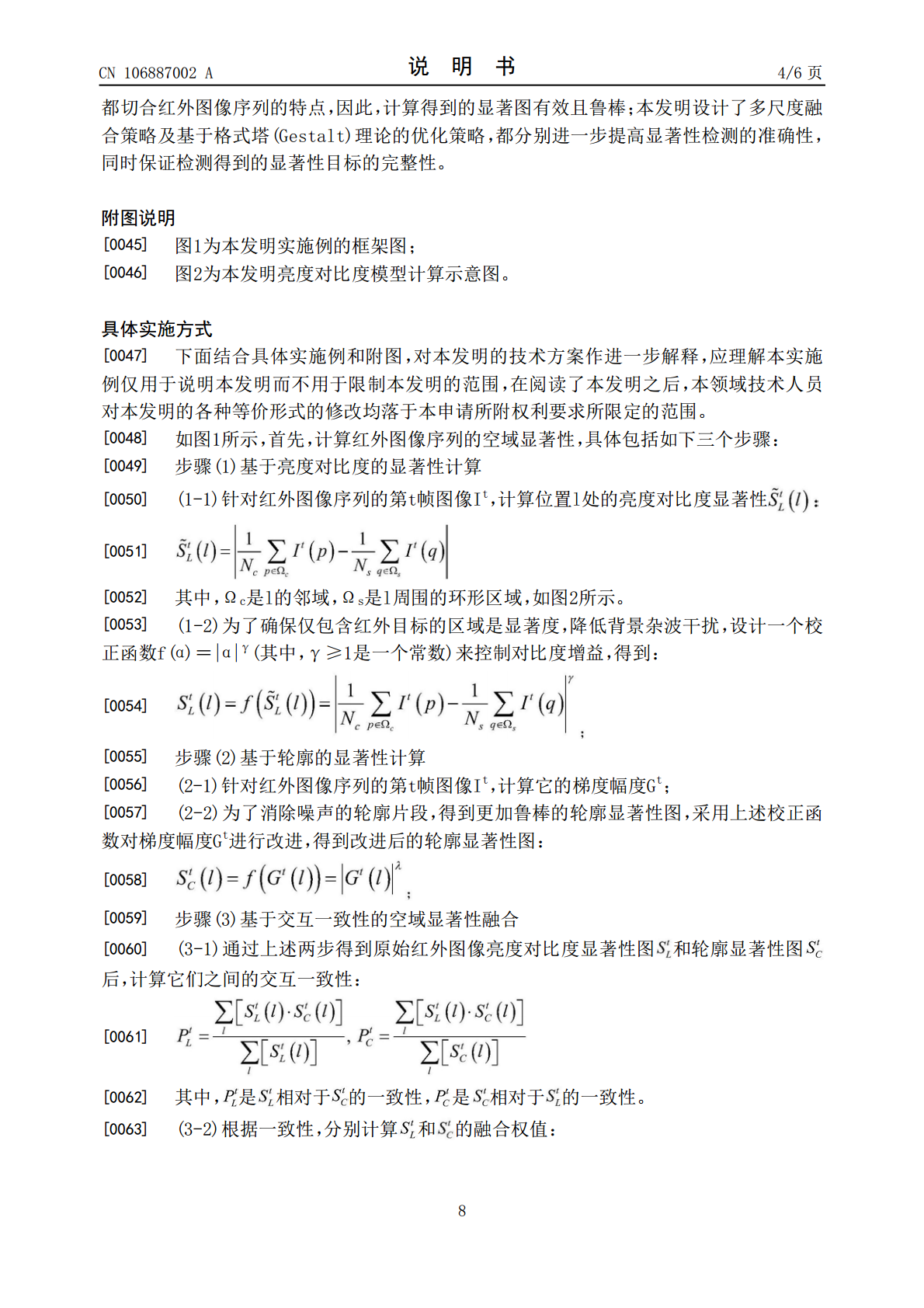
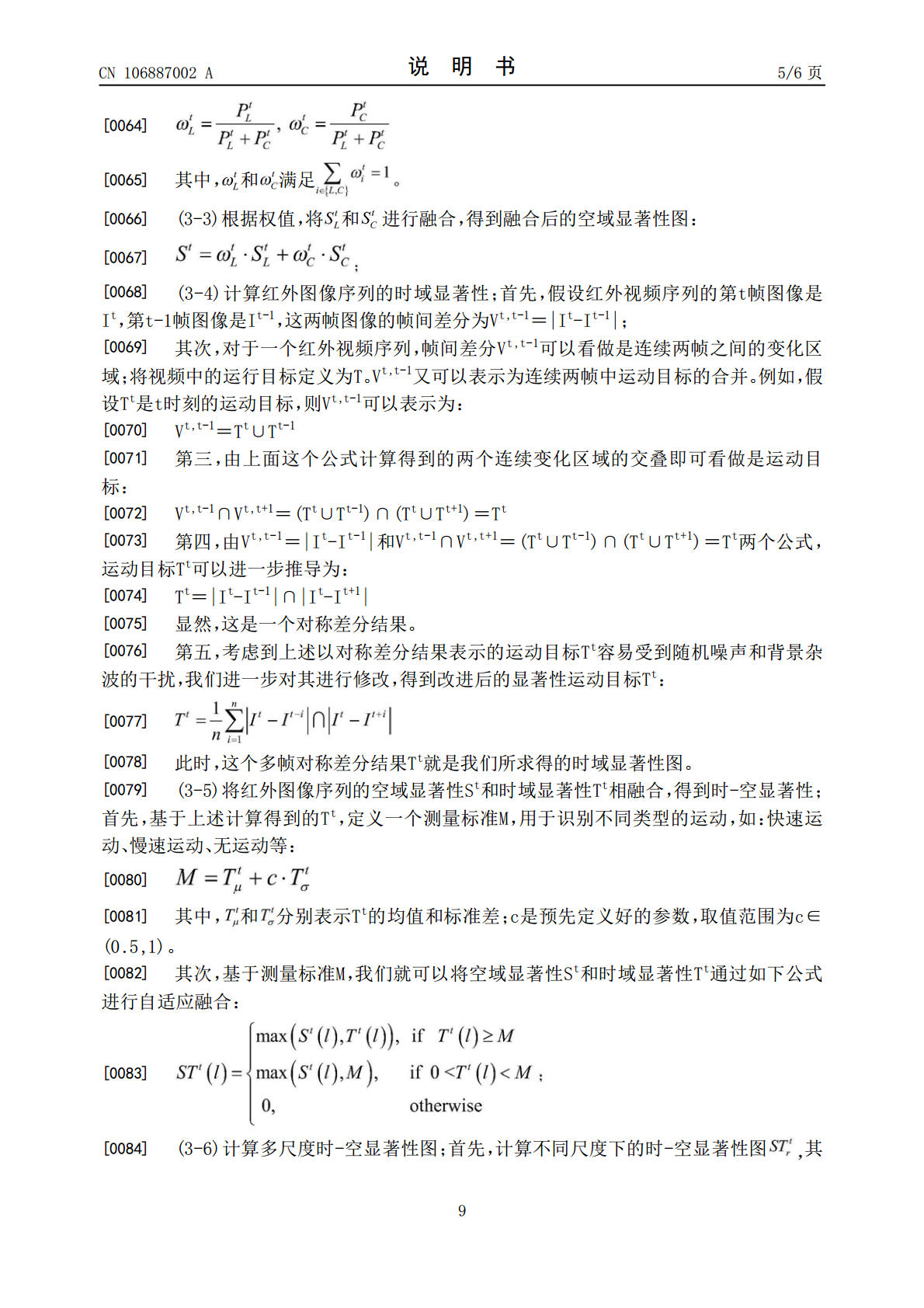
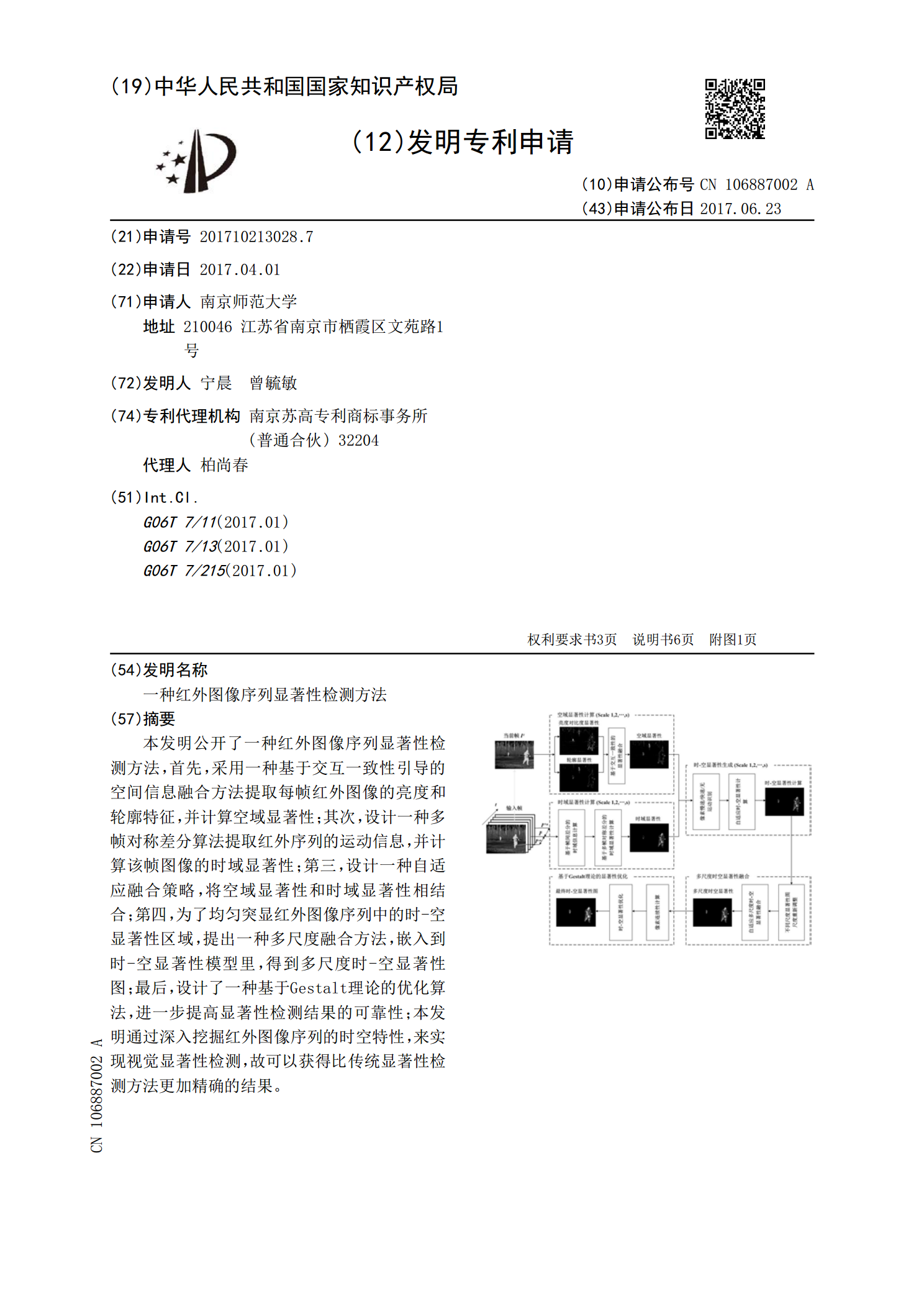
本发明公开了一种红外图像序列显著性检测方法,首先,采用一种基于交互一致性引导的空间信息融合方法提取每帧红外图像的亮度和轮廓特征,并计算空域显著性;其次,设计一种多帧对称差分算法提取红外序列的运动信息,并计算该帧图像的时域显著性;第三,设计一种自适应融合策略,将空域显著性和时域显著性相结合;第四,为了均匀突显红外图像序列中的时‑空显著性区域,提出一种多尺度融合方法,嵌入到时‑空显著性模型里,得到多尺度时‑空显著性图;最后,设计了一种基于Gestalt理论的优化算法,进一步提高显著性检测结果的可靠性;本发明通
基于混合算法的红外图像显著性区域检测方法.pdf
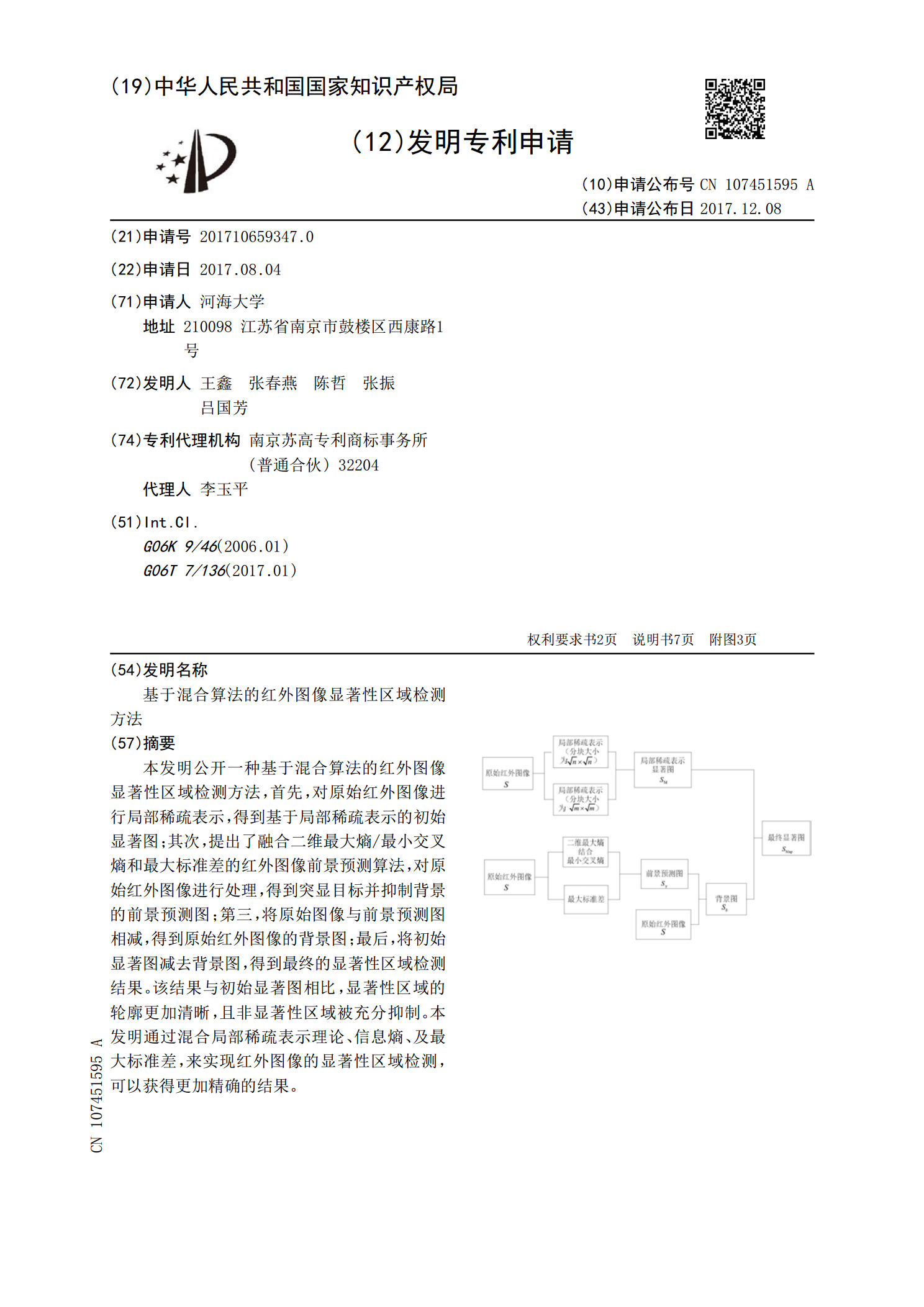
本发明公开一种基于混合算法的红外图像显著性区域检测方法,首先,对原始红外图像进行局部稀疏表示,得到基于局部稀疏表示的初始显著图;其次,提出了融合二维最大熵/最小交叉熵和最大标准差的红外图像前景预测算法,对原始红外图像进行处理,得到突显目标并抑制背景的前景预测图;第三,将原始图像与前景预测图相减,得到原始红外图像的背景图;最后,将初始显著图减去背景图,得到最终的显著性区域检测结果。该结果与初始显著图相比,显著性区域的轮廓更加清晰,且非显著性区域被充分抑制。本发明通过混合局部稀疏表示理论、信息熵、及最大标准差

一种图像显著性的检测方法.pdf
本发明涉及一种图像显著性的检测方法,该方法包括:对输入图像进行格式转换,得到灰度图像和Lab格式图像;计算灰度图像每一个像素点的灰度特征值,并计算灰度特征均值AvgH;计算Lab格式图像的L、A和B三个分量,并计算这三个分量值的平均值和特征值;将所得每个特征值与其均值的欧氏距离作为该像素的显著性值,最后将所有像素的显著性值转化为灰度图像构造显著性图。本发明方法复杂度低、简单易行,可操作性强,相比现有图像显著性检测方法的表现结果更好。本发明方法可用于提取场景图像中人们感兴趣的区域,特别是敦煌壁画初始轮廓信息

一种适合红外序列图像的背景建模方法.docx
一种适合红外序列图像的背景建模方法Title:BackgroundModelingforInfraredSequenceImagesAbstract:Backgroundmodelingisacrucialtaskincomputervisionapplications,includingsurveillancesystems,objectdetection,andtracking.Infrared(IR)sequenceimagesoftenpossessdistinctivecharacteristi

涡流脉冲红外图像序列降噪方法.docx
涡流脉冲红外图像序列降噪方法摘要:涡流脉冲红外图像图像序列是一种重要的非接触式测量方法。由于其实时性、高灵敏度、高分辨率等特点,广泛应用于工业、生物、医学等领域。然而,图像序列中存在的噪声和干扰问题直接影响其测量精度和有效性。因此,本论文提出了一种涡流脉冲红外图像序列降噪方法,基于小波变换和机器学习算法,能够有效地减少噪声和干扰。关键词:涡流脉冲红外图像序列,降噪,小波变换,机器学习1.引言涡流脉冲红外图像序列是一种非接触式测量方法,具有高灵敏度、高分辨率、实时性等特点。被广泛应用于工业生产、医学诊疗等领