
基于混合算法的红外图像显著性区域检测方法.pdf

是你****晨呀


1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于混合算法的红外图像显著性区域检测方法.pdf
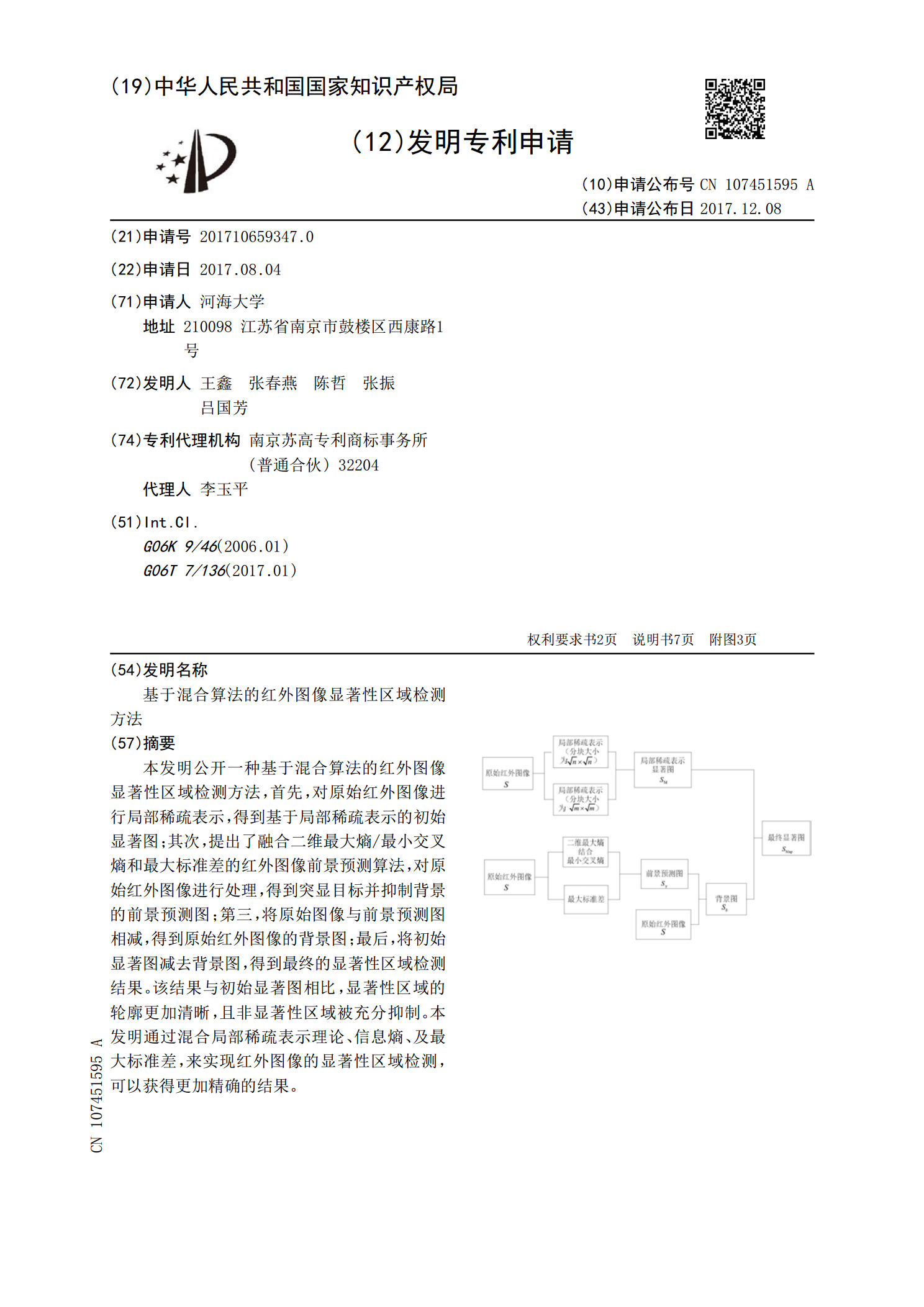
本发明公开一种基于混合算法的红外图像显著性区域检测方法,首先,对原始红外图像进行局部稀疏表示,得到基于局部稀疏表示的初始显著图;其次,提出了融合二维最大熵/最小交叉熵和最大标准差的红外图像前景预测算法,对原始红外图像进行处理,得到突显目标并抑制背景的前景预测图;第三,将原始图像与前景预测图相减,得到原始红外图像的背景图;最后,将初始显著图减去背景图,得到最终的显著性区域检测结果。该结果与初始显著图相比,显著性区域的轮廓更加清晰,且非显著性区域被充分抑制。本发明通过混合局部稀疏表示理论、信息熵、及最大标准差

基于区域对比信息混合编码的图像显著性检测方法.docx
基于区域对比信息混合编码的图像显著性检测方法摘要:本文提出了一种基于区域对比信息混合编码的图像显著性检测方法。该方法首先使用超像素算法将图像分割成若干个重要区域,然后使用区域对比信息对每个区域进行编码,在编码值中混合空间和频率信息以提高编码的效率。最后,利用混合编码的结果计算出每个区域的显著性值,从而得到整个图像的显著性图。实验证明,该方法在多个数据集上的表现优于现有的一些方法。关键词:图像显著性检测,区域对比信息,混合编码,超像素算法引言:图像显著性检测是计算机视觉领域的热门问题之一,其目的是识别出图像

基于标签语义的图像显著性区域检测算法研究.docx
基于标签语义的图像显著性区域检测算法研究基于标签语义的图像显著性区域检测算法研究摘要:图像显著性区域检测是计算机视觉领域中的一个重要研究方向,大量的研究工作已致力于提高图像显著性区域检测的精度和效率。本文针对传统的图像显著性区域检测算法存在的问题,提出了一种基于标签语义的图像显著性区域检测算法。该算法通过结合图像的语义信息,将图像划分为不同的区域,并根据区域的显著性进行排序和筛选,从而实现对图像显著性区域的准确检测。实验证明,该算法在提高图像显著性区域检测准确度的同时,具有较快的计算速度。关键词:图像显著

基于显著性语义区域加权的图像检索算法.docx
基于显著性语义区域加权的图像检索算法随着现代技术的发展,图像信息处理变得越来越重要。图像检索是一种从图像数据库中查询和检索具有相似特征的图像的技术。该技术可以通过匹配图像的特定属性,如颜色、纹理和形状等,来寻找数据库中与查询图像最相似的图像。为了提高图像检索的准确性,许多图像检索技术已经被开发。其中,基于显著性语义区域加权的图像检索算法被证明是一种有效的技术。显著性语义区域是指具有较高语义信息的图像区域。该算法的设计思想是使用计算机视觉和机器学习技术对图像进行自动分割,分离出不同的显著性语义区域。然后根据

基于显著性语义区域加权的图像检索算法.docx
基于显著性语义区域加权的图像检索算法基于显著性语义区域加权的图像检索算法摘要:随着数字图像的快速增加,图像检索技术成为处理和管理海量图像数据的重要手段。本论文提出了一种基于显著性语义区域加权的图像检索算法。该算法利用了图像中的显著性和语义信息,通过加权方法将显著性语义区域与图像特征进行融合,从而提高图像检索的性能。实验结果表明,该算法具有较好的图像检索效果。关键词:图像检索;显著性;语义;区域加权1.引言随着数字图像的广泛应用,图像检索技术成为获取和管理海量图像数据的重要手段。目前,大多数图像检索算法主要