
一种复合转向系统及其多目标优化方法.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种复合转向系统及其多目标优化方法.pdf
本发明公开了一种复合转向系统及其多目标优化方法,该复合转向系统融合了电动助力转向系统和线控四轮转向系统,采用一个助力电机和四个轮毂电机进行转向助力。本发明在线控四轮转向系统基础上增设电动助力转向系统,存在机械连接,能够确保转向系统的可靠性。由于复合转向系统的结构复杂,本发明基于该复合转向系统提出多目标优化方法,以部分转向系统结构参数作为优化变量,建立目标函数,设置约束条件,建立复合转向系统优化模型,采用模拟退火算法对复合转向系统进行多目标优化。

一种适时四驱复合转向系统及其多目标优化方法.pdf
本发明公开了一种适时四驱复合转向系统及其多目标优化方法,该系统包括差动转向系统和线控四轮转向系统,采用四个独立的轮毂电机实现转向助力。本发明在差动转向系统的基础上,增设线控四轮转向系统和电子辅助系统,使适时四驱复合转向系统可以根据车辆的不同工况,在两驱差动转向和线控四轮转向两种模式间切换,完成汽车转向。本发明基于该适时四驱复合转向系统提出一种多目标优化方法,选取转向系统的部分参数作为优化变量,建立目标函数,设置约束条件,搭建适时四驱复合转向系统的模型,采用和声搜索算法对一种适时四驱复合转向系统进行多目标优

基于鸟群算法的电动助力转向系统及其多目标优化方法.pdf
本发明公开了一种基于鸟群算法的电动助力转向系统及其多目标优化方法,转向系统包括方向盘、转向轴、转矩传感器、转向输出轴、齿轮齿条转向器、助力电机、减速机构、电子控制单元、车速传感器。在发动机怠速工况下,电动助力转向系统的固有频率与发动机振动频率相近,容易发生共振,影响驾驶员直观感受,并且影响转向性能。本发明通过新兴鸟群算法,对电动助力转向系统转向性能和固有频率进行多目标优化,提高电动助力转向系统的可靠性与驾驶员的舒适度。
一种复合转向系统及其模式切换方法.pdf
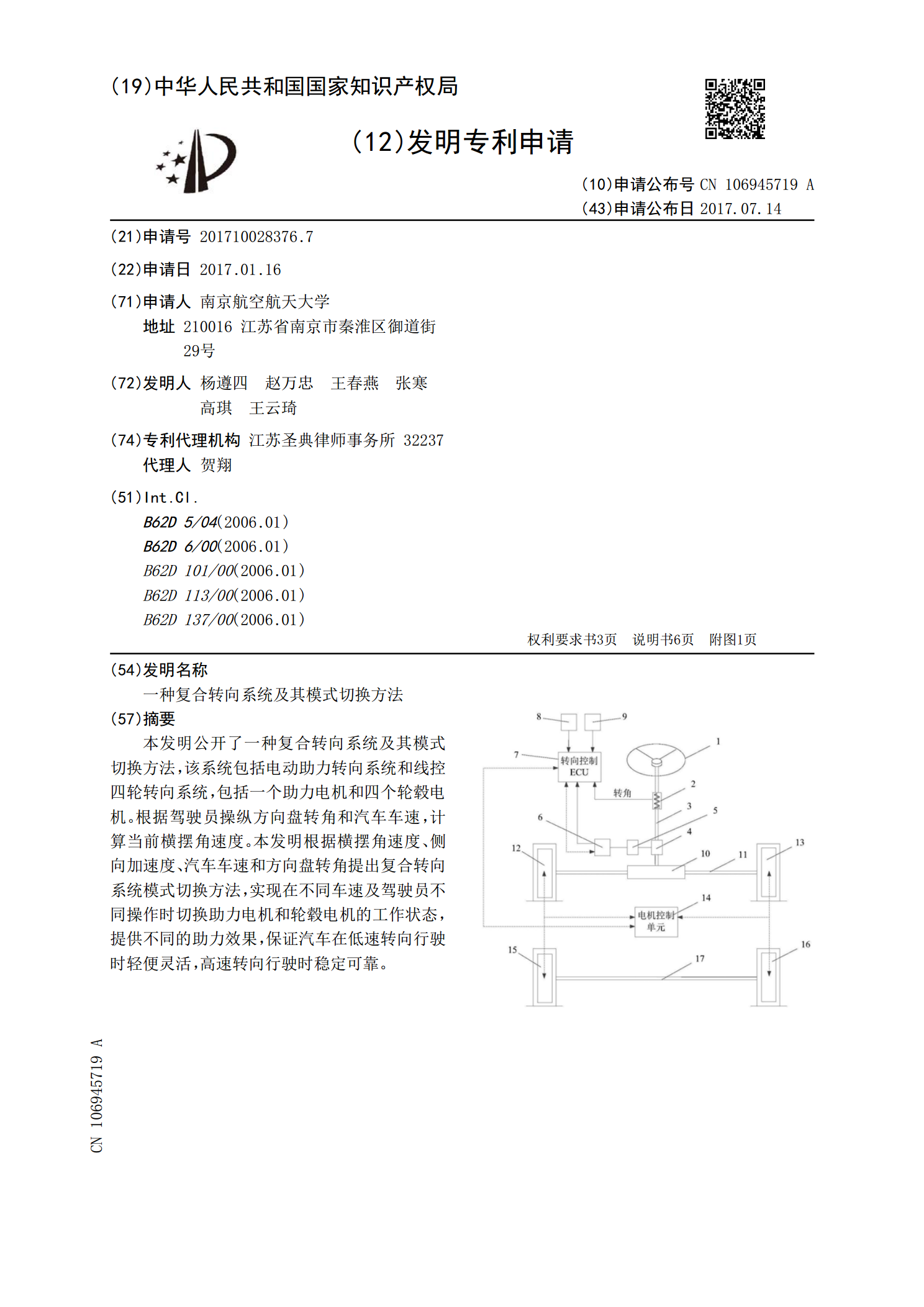
本发明公开了一种复合转向系统及其模式切换方法,该系统包括电动助力转向系统和线控四轮转向系统,包括一个助力电机和四个轮毂电机。根据驾驶员操纵方向盘转角和汽车车速,计算当前横摆角速度。本发明根据横摆角速度、侧向加速度、汽车车速和方向盘转角提出复合转向系统模式切换方法,实现在不同车速及驾驶员不同操作时切换助力电机和轮毂电机的工作状态,提供不同的助力效果,保证汽车在低速转向行驶时轻便灵活,高速转向行驶时稳定可靠。

一种电液主动转向系统及其多学科优化方法.pdf
本发明公开了一种电液主动转向系统及其多学科优化方法,该系统包括机械传动模块、电动助力模块、液压变传动模块及控制模块。ECU输出信号控制助力电机输出转矩,通过安装在转向轴上的减速机构对系统执行助力;ECU还输出信号分别控制液压泵驱动电机和比例换向阀工作,改变转向直拉杆液压缸活塞两侧油压,从而改变前轮转角。针对该系统提出一种多学科优化方法,综合考虑汽车动力学、结构轻量化、振动与噪声以及能量消耗等多个学科之间的复杂耦合关系,对系统关键参数进行多学科优化,降低系统总体优化计算量,提高最优解的搜索能力和收敛速度,缩