
基于鸟群算法的电动助力转向系统及其多目标优化方法.pdf

玉环****找我

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于鸟群算法的电动助力转向系统及其多目标优化方法.pdf
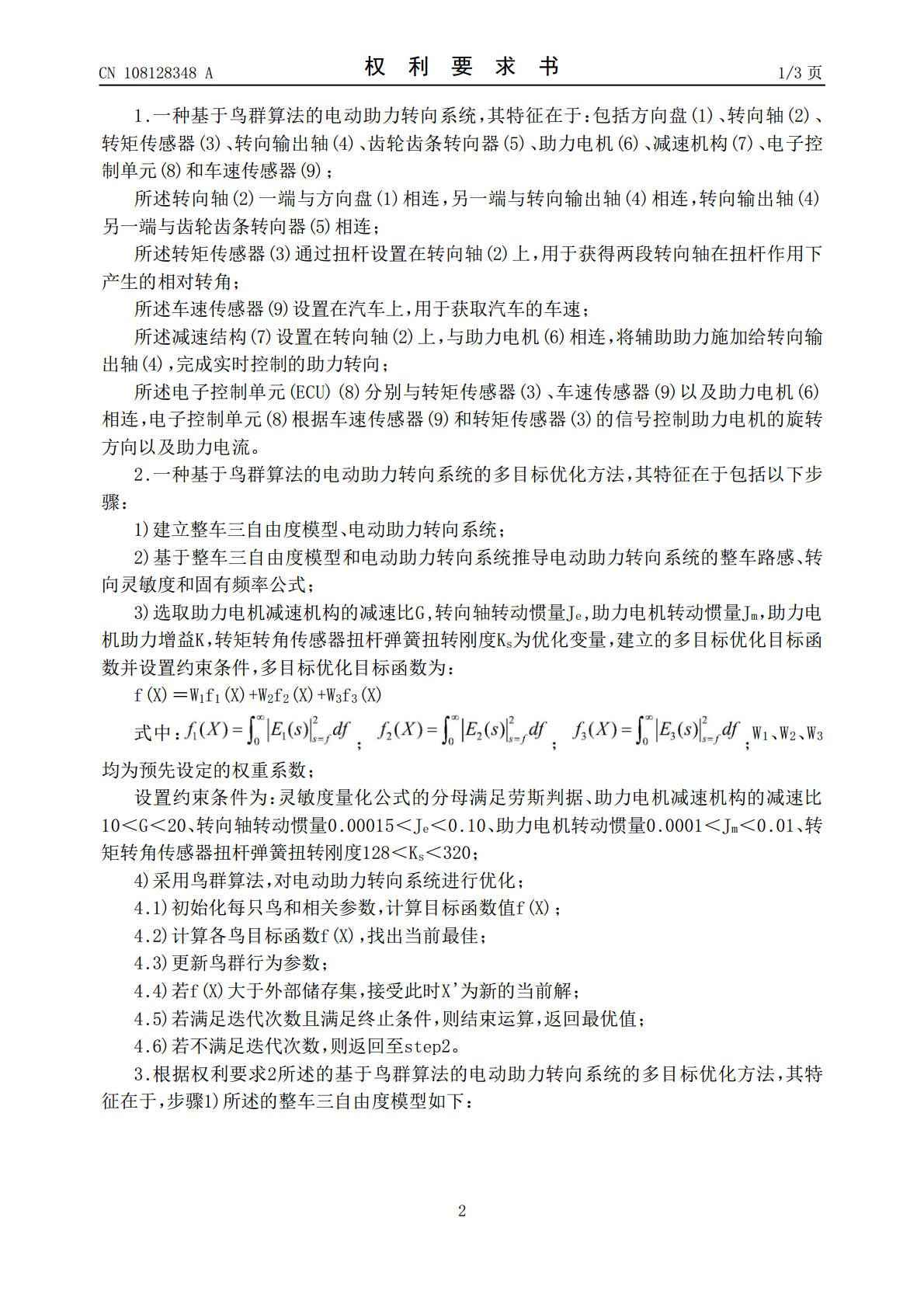
本发明公开了一种基于鸟群算法的电动助力转向系统及其多目标优化方法,转向系统包括方向盘、转向轴、转矩传感器、转向输出轴、齿轮齿条转向器、助力电机、减速机构、电子控制单元、车速传感器。在发动机怠速工况下,电动助力转向系统的固有频率与发动机振动频率相近,容易发生共振,影响驾驶员直观感受,并且影响转向性能。本发明通过新兴鸟群算法,对电动助力转向系统转向性能和固有频率进行多目标优化,提高电动助力转向系统的可靠性与驾驶员的舒适度。
电动汽车电动助力转向系统及其转向助力方法.pdf
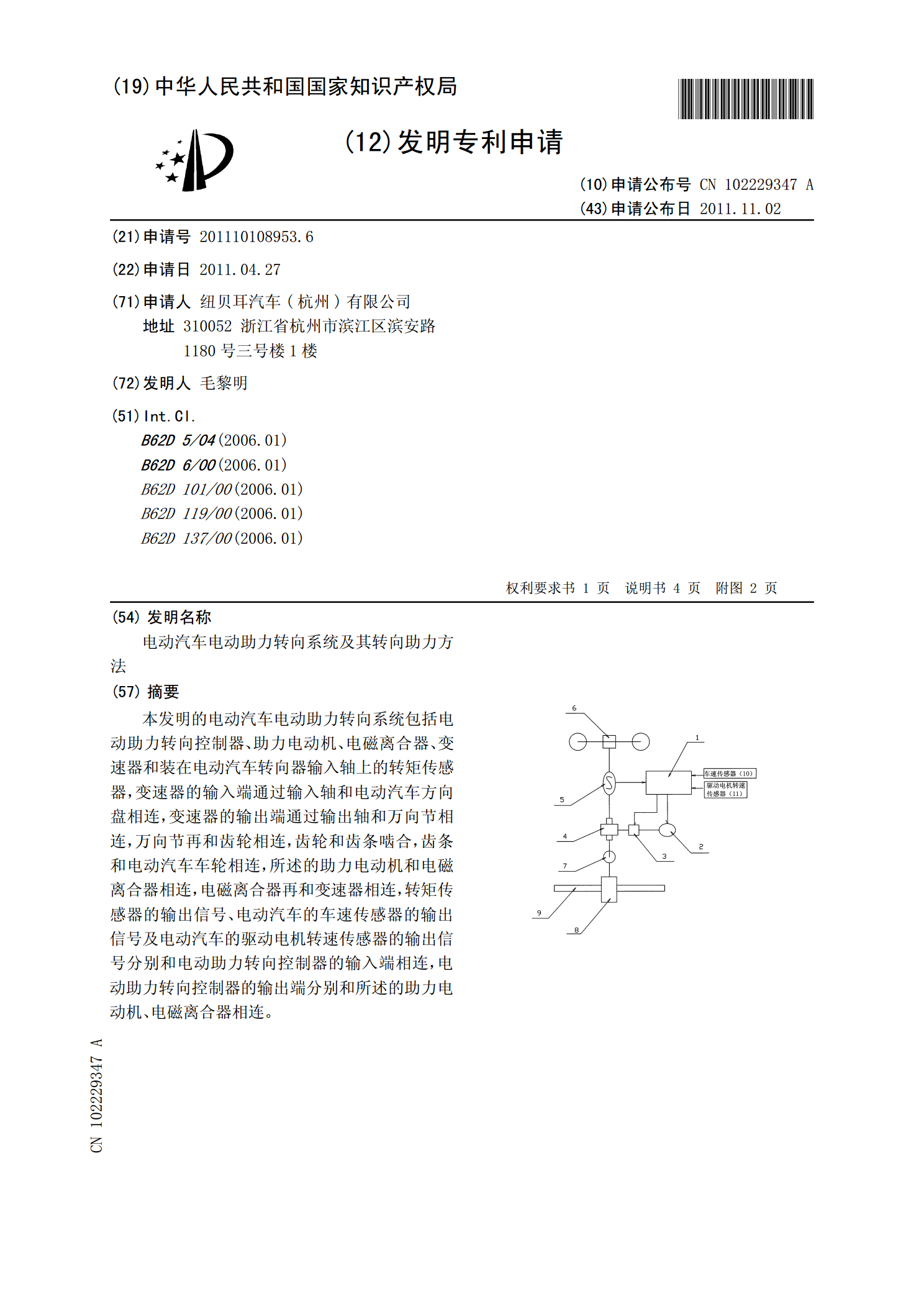
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机

基于电动助力转向系统的转向盘转角跟随算法.docx
基于电动助力转向系统的转向盘转角跟随算法基于电动助力转向系统的转向盘转角跟随算法摘要:随着智能化技术的发展,车辆的转向控制系统变得越来越复杂。电动助力转向系统作为其中一种新型的转向系统,具有更高的精度和灵活性。本论文提出了一种基于电动助力转向系统的转向盘转角跟随算法,通过对传感器数据的实时处理和控制指令的生成,实现了良好的转向盘转角跟随效果。1.引言随着汽车行业的快速发展,转向系统的性能和安全性要求也越来越高。传统的转向系统通常使用液压助力转向,但是其反应速度慢、操控性较差。相比之下,电动助力转向系统具有

基于电动助力转向系统的转向盘转角跟随算法.docx
基于电动助力转向系统的转向盘转角跟随算法本文基于电动助力转向系统的转向盘转角跟随算法,对该算法的原理、应用场景、实现方法进行探讨。首先,介绍了电动助力转向系统和转向盘转角跟随算法的背景及意义,其次,阐述了转向盘转角跟随算法的原理及实现步骤,最后,探讨了该算法的应用场景及未来发展趋势。一、电动助力转向系统及转向盘转角跟随算法概述现代汽车的转向系统一般分为机械式助力转向系统和电动助力转向系统两种。机械式助力转向系统是在机械部件上采用特殊的结构设计和材料搭配,在较小的力量作用下就可以带动车辆转向,因此更为轻便、

基于鸟群算法的微电网多目标运行优化.docx
基于鸟群算法的微电网多目标运行优化基于鸟群算法的微电网多目标运行优化摘要:微电网作为一种分布式电源系统,可以提供可靠的电力供应,并在能源管理中发挥重要作用。然而,由于微电网的复杂性和多样性,其优化问题非常复杂。本文提出了一种基于鸟群算法的微电网多目标运行优化方法,该方法通过模拟鸟群的群体行为来求解微电网优化问题。实验证明,该方法可以在多目标优化中取得良好的性能。关键词:微电网,多目标优化,鸟群算法引言:随着能源需求的增加和对环境影响的担忧,微电网正变得越来越受关注。微电网是一种由多种分布式电源组成的电力系