
一种复合转向系统及其模式切换方法.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种复合转向系统及其模式切换方法.pdf
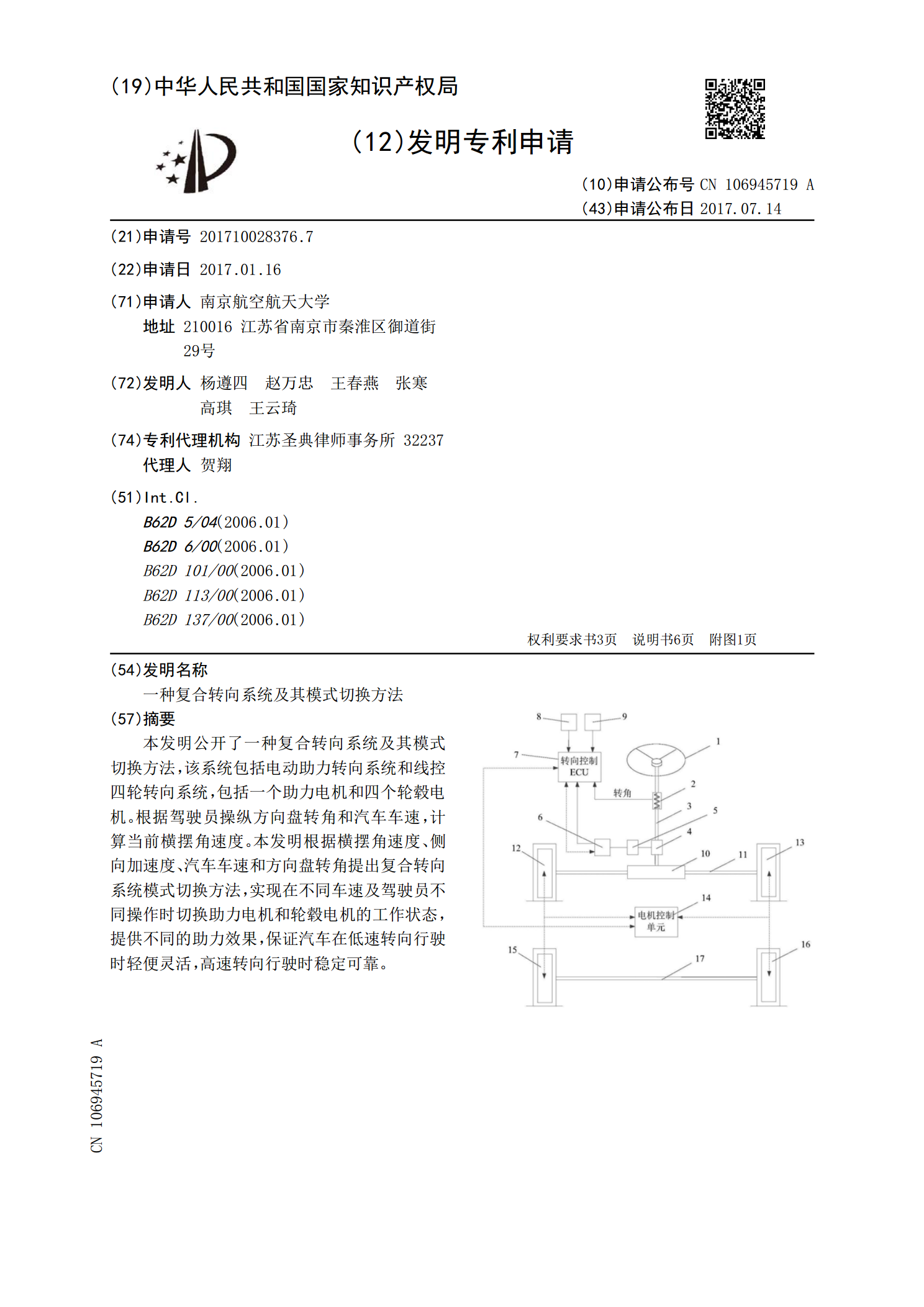
本发明公开了一种复合转向系统及其模式切换方法,该系统包括电动助力转向系统和线控四轮转向系统,包括一个助力电机和四个轮毂电机。根据驾驶员操纵方向盘转角和汽车车速,计算当前横摆角速度。本发明根据横摆角速度、侧向加速度、汽车车速和方向盘转角提出复合转向系统模式切换方法,实现在不同车速及驾驶员不同操作时切换助力电机和轮毂电机的工作状态,提供不同的助力效果,保证汽车在低速转向行驶时轻便灵活,高速转向行驶时稳定可靠。
一种可切换转向助力模式的EPS系统及其模式切换方法.pdf
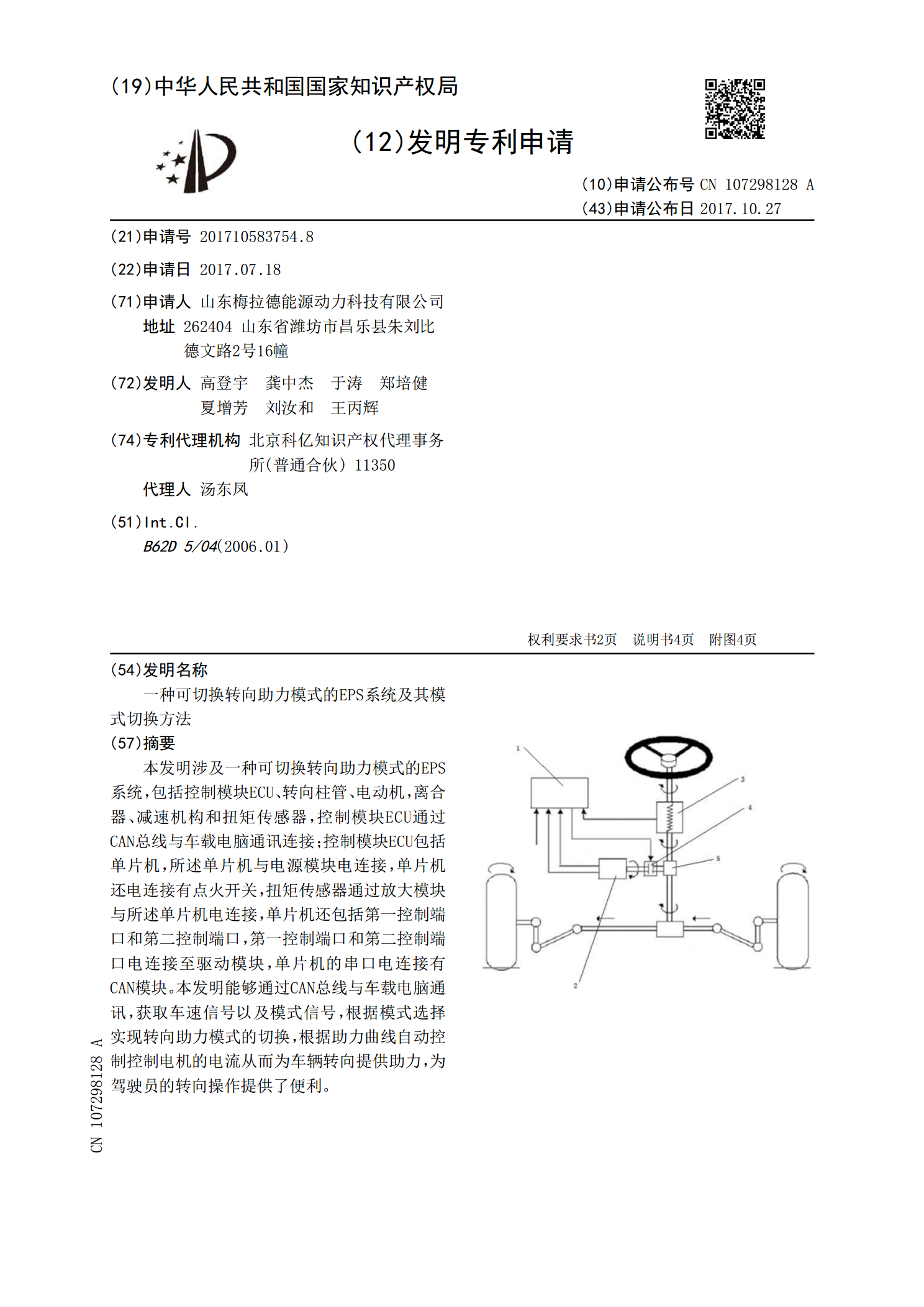
本发明涉及一种可切换转向助力模式的EPS系统,包括控制模块ECU、转向柱管、电动机,离合器、减速机构和扭矩传感器,控制模块ECU通过CAN总线与车载电脑通讯连接;控制模块ECU包括单片机,所述单片机与电源模块电连接,单片机还电连接有点火开关,扭矩传感器通过放大模块与所述单片机电连接,单片机还包括第一控制端口和第二控制端口,第一控制端口和第二控制端口电连接至驱动模块,单片机的串口电连接有CAN模块。本发明能够通过CAN总线与车载电脑通讯,获取车速信号以及模式信号,根据模式选择实现转向助力模式的切换,根据助力
一种可实现多种转向模式切换的转向系统.pdf
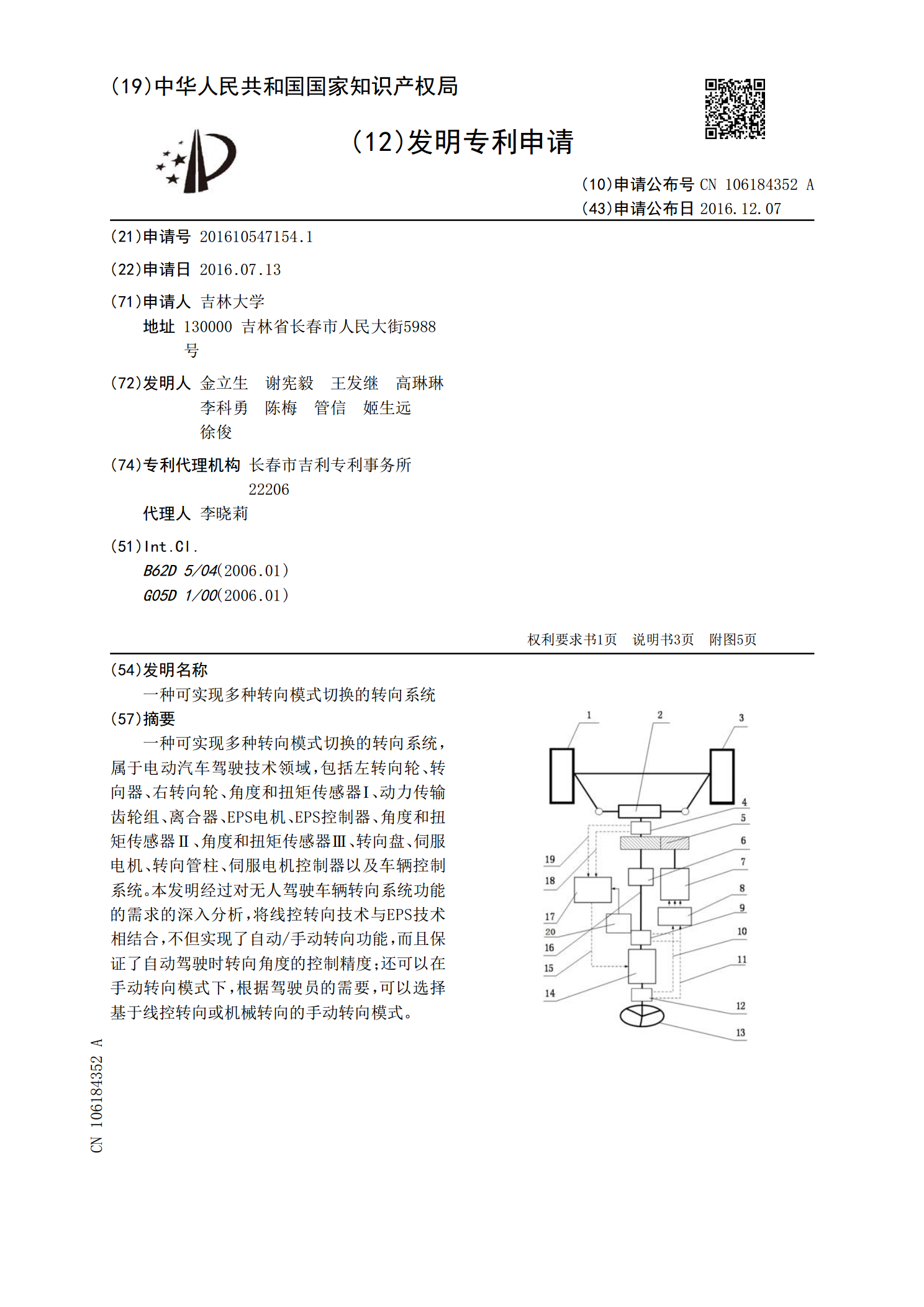
一种可实现多种转向模式切换的转向系统,属于电动汽车驾驶技术领域,包括左转向轮、转向器、右转向轮、角度和扭矩传感器Ⅰ、动力传输齿轮组、离合器、EPS电机、EPS控制器、角度和扭矩传感器Ⅱ、角度和扭矩传感器Ⅲ、转向盘、伺服电机、转向管柱、伺服电机控制器以及车辆控制系统。本发明经过对无人驾驶车辆转向系统功能的需求的深入分析,将线控转向技术与EPS技术相结合,不但实现了自动/手动转向功能,而且保证了自动驾驶时转向角度的控制精度;还可以在手动转向模式下,根据驾驶员的需要,可以选择基于线控转向或机械转向的手动转向模式

一种车辆转向模式的切换系统.pdf
本发明公开了一种车辆转向模式的切换系统。通过第一联动杆将第一阀门、第二阀门、第三阀门串成一组联动操作,通过第二联动杆将第四阀门、第五阀门、第六阀门串成一组联动操作,并将油口分别连接到前轮转向油缸和后轮转向油缸。操作第一联动杆及第二联动杆可以实现各阀门的通断状态的切换,以实现前后轮转向油缸的不同动作,从而实现多种转向模式之间的切换。本发明无电气元件、成本低、可靠性高、部件少、操作简单直观、结构紧凑、集成度高。
电动助力转向系统的驾驶模式切换控制方法.pdf
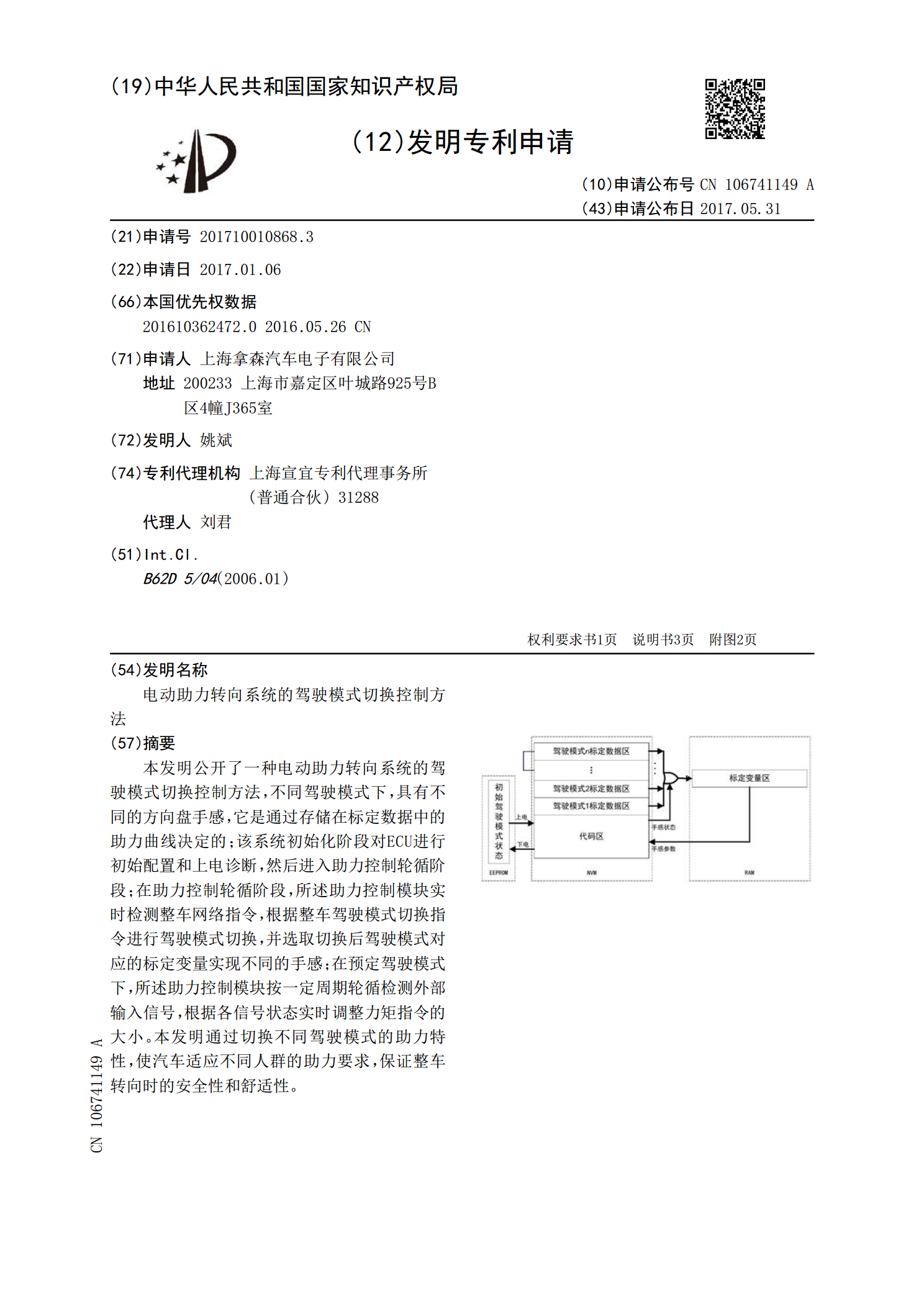
本发明公开了一种电动助力转向系统的驾驶模式切换控制方法,不同驾驶模式下,具有不同的方向盘手感,它是通过存储在标定数据中的助力曲线决定的;该系统初始化阶段对ECU进行初始配置和上电诊断,然后进入助力控制轮循阶段;在助力控制轮循阶段,所述助力控制模块实时检测整车网络指令,根据整车驾驶模式切换指令进行驾驶模式切换,并选取切换后驾驶模式对应的标定变量实现不同的手感;在预定驾驶模式下,所述助力控制模块按一定周期轮循检测外部输入信号,根据各信号状态实时调整力矩指令的大小。本发明通过切换不同驾驶模式的助力特性,使汽车适