
一种单驱双向蠕行式管道清理机器人.pdf

依波****bc

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单驱双向蠕行式管道清理机器人.pdf
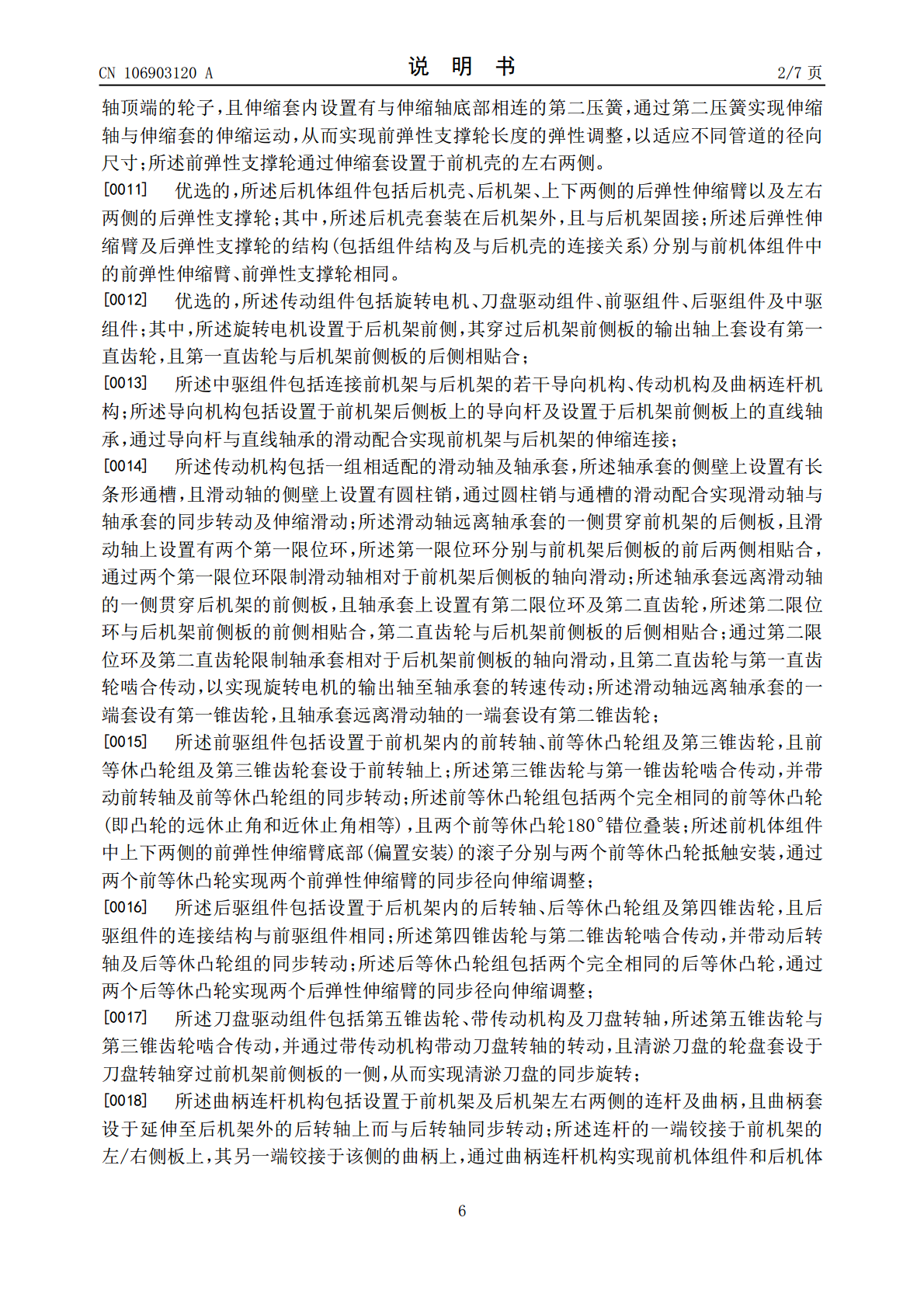
本发明公开了一种单驱双向蠕行式管道清理机器人,包括前机体组件、传动组件和后机体组件;其中,所述传动组件由一个动力驱动,且通过连杆机构、齿轮机构和等休凸轮机构的传动作用,实现前机体组件和后机体组件沿径向的交替收缩与支撑,以及前机体组件和后机体组件之间的轴向伸缩,同时实现清淤刀盘的同步旋转,从而实现机器人沿管道正反双向的蠕动式行走以及管道清理作业。本发明稳定可靠,紧凑实用,实现了在管径变化较大的管道内的单驱双向蠕动行走和管道清理,有效提高了管道机器人的越障性和对管径变化的适应性,提高了管道机器人的续航能力,对
全强支撑型单驱双向蠕行式管道清理机器人.pdf
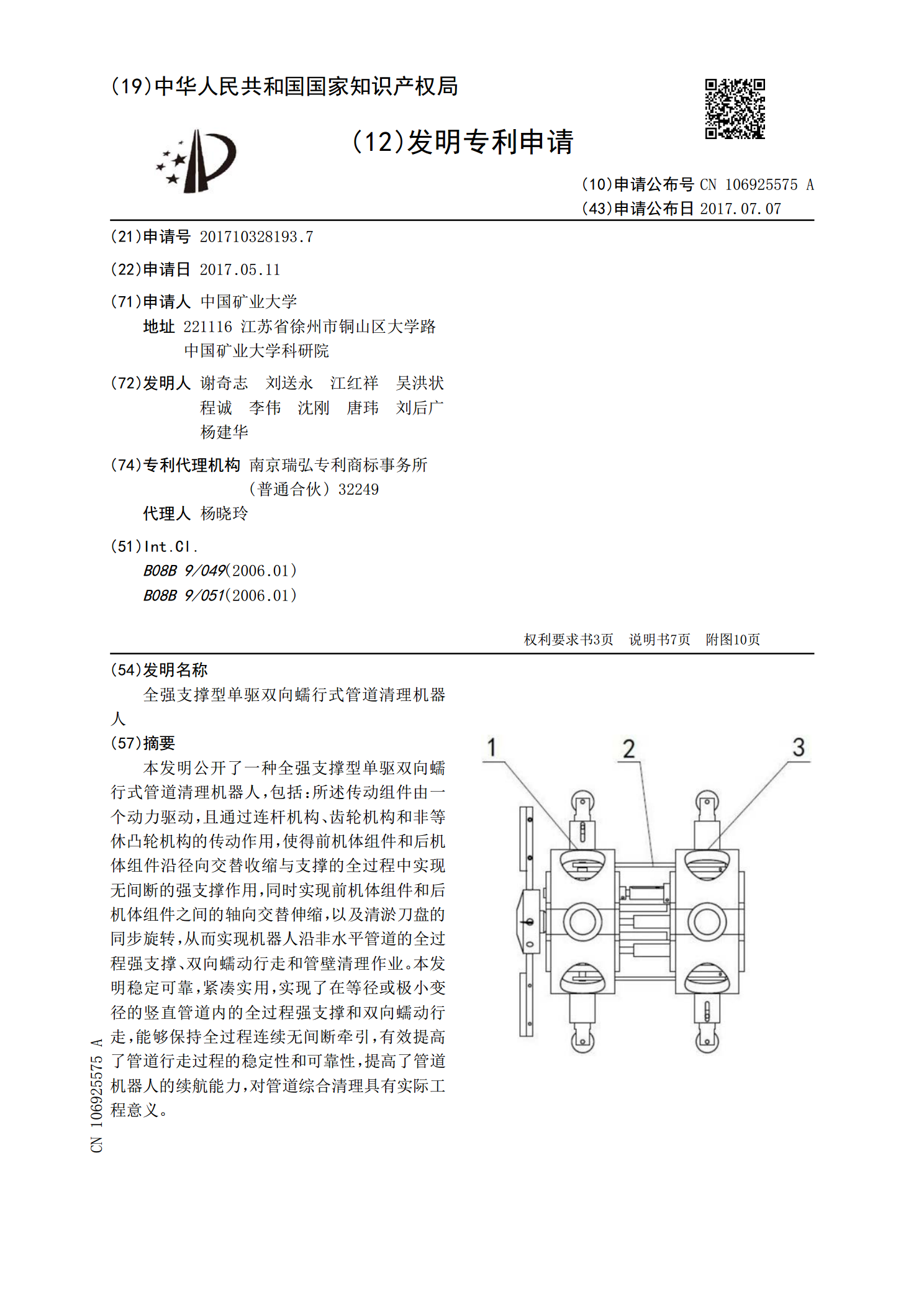
本发明公开了一种全强支撑型单驱双向蠕行式管道清理机器人,包括:所述传动组件由一个动力驱动,且通过连杆机构、齿轮机构和非等休凸轮机构的传动作用,使得前机体组件和后机体组件沿径向交替收缩与支撑的全过程中实现无间断的强支撑作用,同时实现前机体组件和后机体组件之间的轴向交替伸缩,以及清淤刀盘的同步旋转,从而实现机器人沿非水平管道的全过程强支撑、双向蠕动行走和管壁清理作业。本发明稳定可靠,紧凑实用,实现了在等径或极小变径的竖直管道内的全过程强支撑和双向蠕动行走,能够保持全过程连续无间断牵引,有效提高了管道行走过程的
一种连杆蠕行管道机器人.pdf
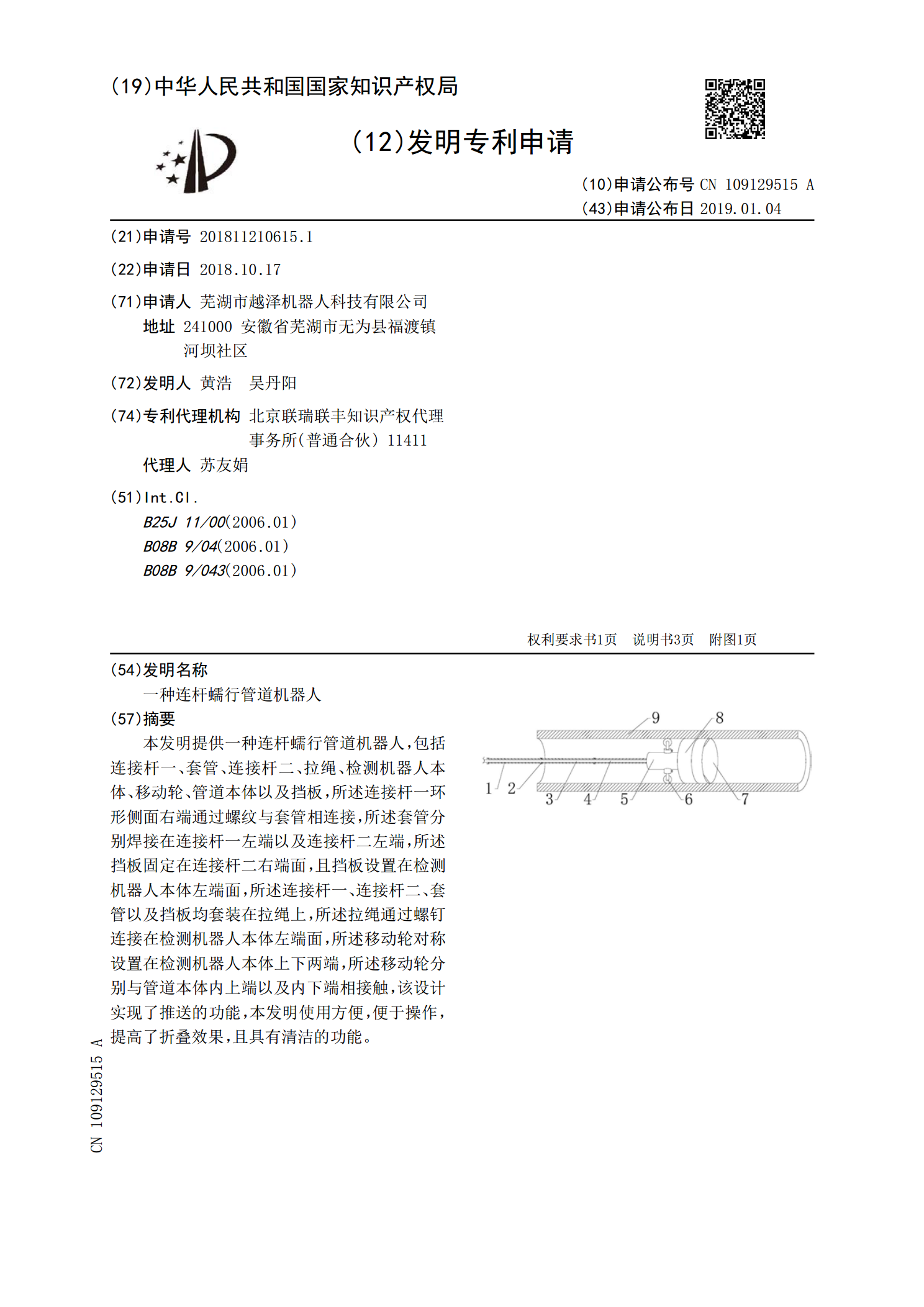
本发明提供一种连杆蠕行管道机器人,包括连接杆一、套管、连接杆二、拉绳、检测机器人本体、移动轮、管道本体以及挡板,所述连接杆一环形侧面右端通过螺纹与套管相连接,所述套管分别焊接在连接杆一左端以及连接杆二左端,所述挡板固定在连接杆二右端面,且挡板设置在检测机器人本体左端面,所述连接杆一、连接杆二、套管以及挡板均套装在拉绳上,所述拉绳通过螺钉连接在检测机器人本体左端面,所述移动轮对称设置在检测机器人本体上下两端,所述移动轮分别与管道本体内上端以及内下端相接触,该设计实现了推送的功能,本发明使用方便,便于操作,提

全驱蠕动式管道机器人.pdf
本发明的全驱蠕动式管道机器人包括单元节和连接单元节的万向节,单元节包括安装架、轮腿组件、锁止组件和传动组件,轮腿组件、锁止组件和传动组件安装于安装架上,其中轮腿组件用于支撑机器人在管道内壁行走,锁止组件用于锁定单元节,传动组件用于根据电机驱动带动锁止组件动作和单元节相对运动。有益效果在于:单元节中采用的具有内外螺纹的螺管和传动丝杆与锁紧架配合,通过电机驱动其正反转,实现了前后单元节交替锁止。并使机器人产生伸缩前进或后退运动。本发明采用单电机驱动方式,有效的减少了动力源,缩小了机器人体积,减小了能耗,使之更
一种自下而上攀爬式管道清理机器人.pdf
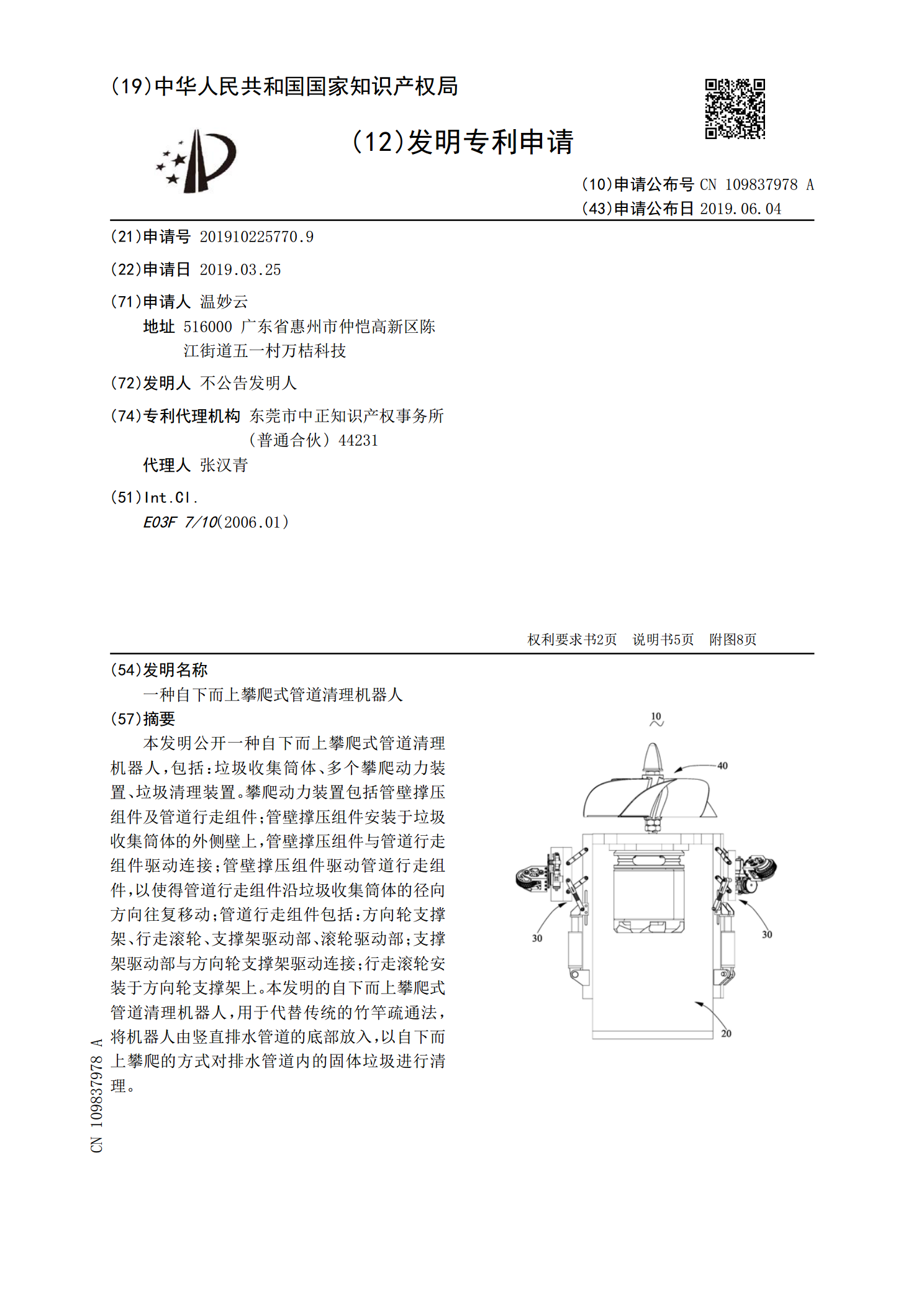
本发明公开一种自下而上攀爬式管道清理机器人,包括:垃圾收集筒体、多个攀爬动力装置、垃圾清理装置。攀爬动力装置包括管壁撑压组件及管道行走组件;管壁撑压组件安装于垃圾收集筒体的外侧壁上,管壁撑压组件与管道行走组件驱动连接;管壁撑压组件驱动管道行走组件,以使得管道行走组件沿垃圾收集筒体的径向方向往复移动;管道行走组件包括:方向轮支撑架、行走滚轮、支撑架驱动部、滚轮驱动部;支撑架驱动部与方向轮支撑架驱动连接;行走滚轮安装于方向轮支撑架上。本发明的自下而上攀爬式管道清理机器人,用于代替传统的竹竿疏通法,将机器人由竖