
一种连杆蠕行管道机器人.pdf

是你****噩呀

1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种连杆蠕行管道机器人.pdf
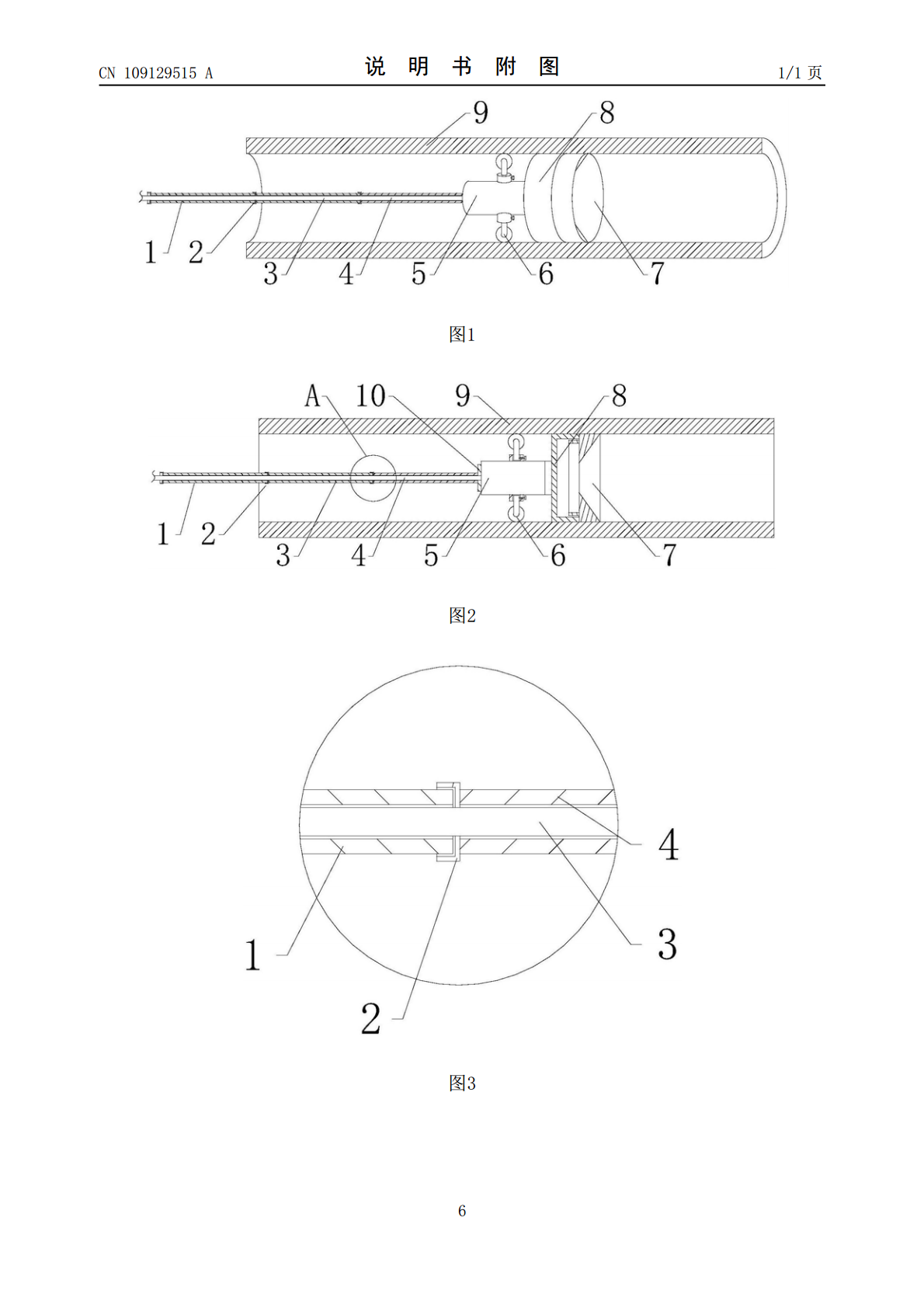
本发明提供一种连杆蠕行管道机器人,包括连接杆一、套管、连接杆二、拉绳、检测机器人本体、移动轮、管道本体以及挡板,所述连接杆一环形侧面右端通过螺纹与套管相连接,所述套管分别焊接在连接杆一左端以及连接杆二左端,所述挡板固定在连接杆二右端面,且挡板设置在检测机器人本体左端面,所述连接杆一、连接杆二、套管以及挡板均套装在拉绳上,所述拉绳通过螺钉连接在检测机器人本体左端面,所述移动轮对称设置在检测机器人本体上下两端,所述移动轮分别与管道本体内上端以及内下端相接触,该设计实现了推送的功能,本发明使用方便,便于操作,提
一种单驱双向蠕行式管道清理机器人.pdf
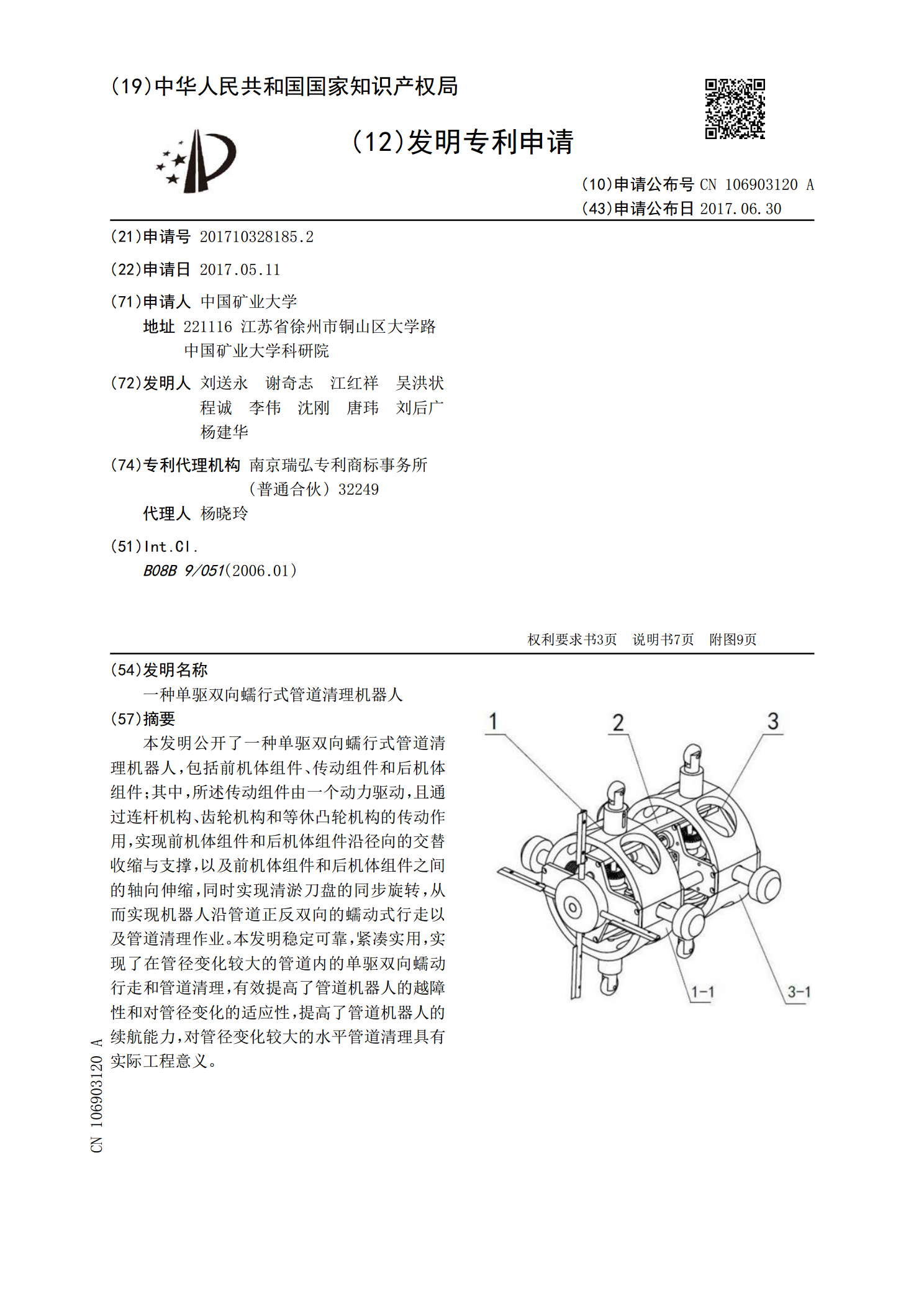
本发明公开了一种单驱双向蠕行式管道清理机器人,包括前机体组件、传动组件和后机体组件;其中,所述传动组件由一个动力驱动,且通过连杆机构、齿轮机构和等休凸轮机构的传动作用,实现前机体组件和后机体组件沿径向的交替收缩与支撑,以及前机体组件和后机体组件之间的轴向伸缩,同时实现清淤刀盘的同步旋转,从而实现机器人沿管道正反双向的蠕动式行走以及管道清理作业。本发明稳定可靠,紧凑实用,实现了在管径变化较大的管道内的单驱双向蠕动行走和管道清理,有效提高了管道机器人的越障性和对管径变化的适应性,提高了管道机器人的续航能力,对
全强支撑型单驱双向蠕行式管道清理机器人.pdf
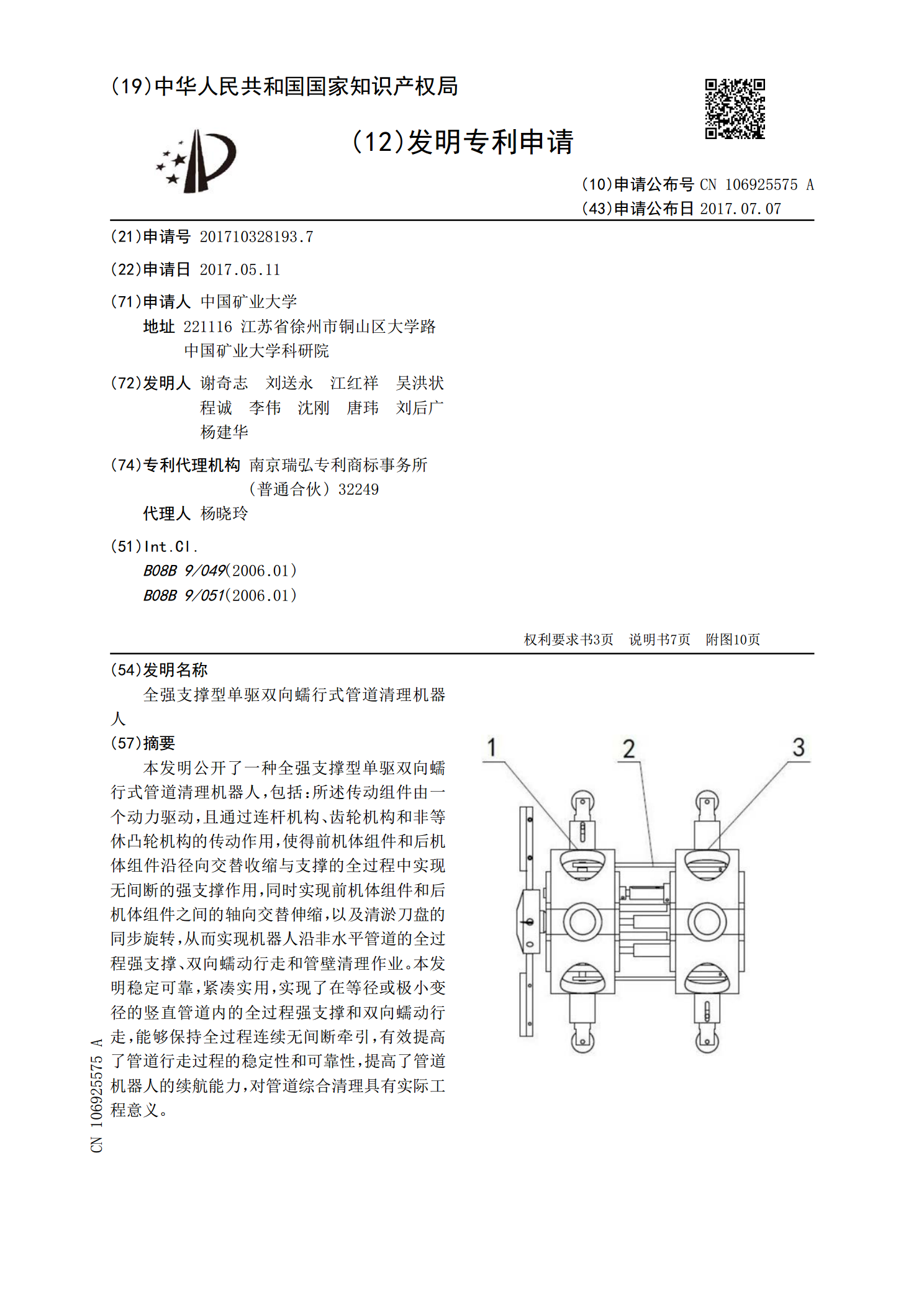
本发明公开了一种全强支撑型单驱双向蠕行式管道清理机器人,包括:所述传动组件由一个动力驱动,且通过连杆机构、齿轮机构和非等休凸轮机构的传动作用,使得前机体组件和后机体组件沿径向交替收缩与支撑的全过程中实现无间断的强支撑作用,同时实现前机体组件和后机体组件之间的轴向交替伸缩,以及清淤刀盘的同步旋转,从而实现机器人沿非水平管道的全过程强支撑、双向蠕动行走和管壁清理作业。本发明稳定可靠,紧凑实用,实现了在等径或极小变径的竖直管道内的全过程强支撑和双向蠕动行走,能够保持全过程连续无间断牵引,有效提高了管道行走过程的
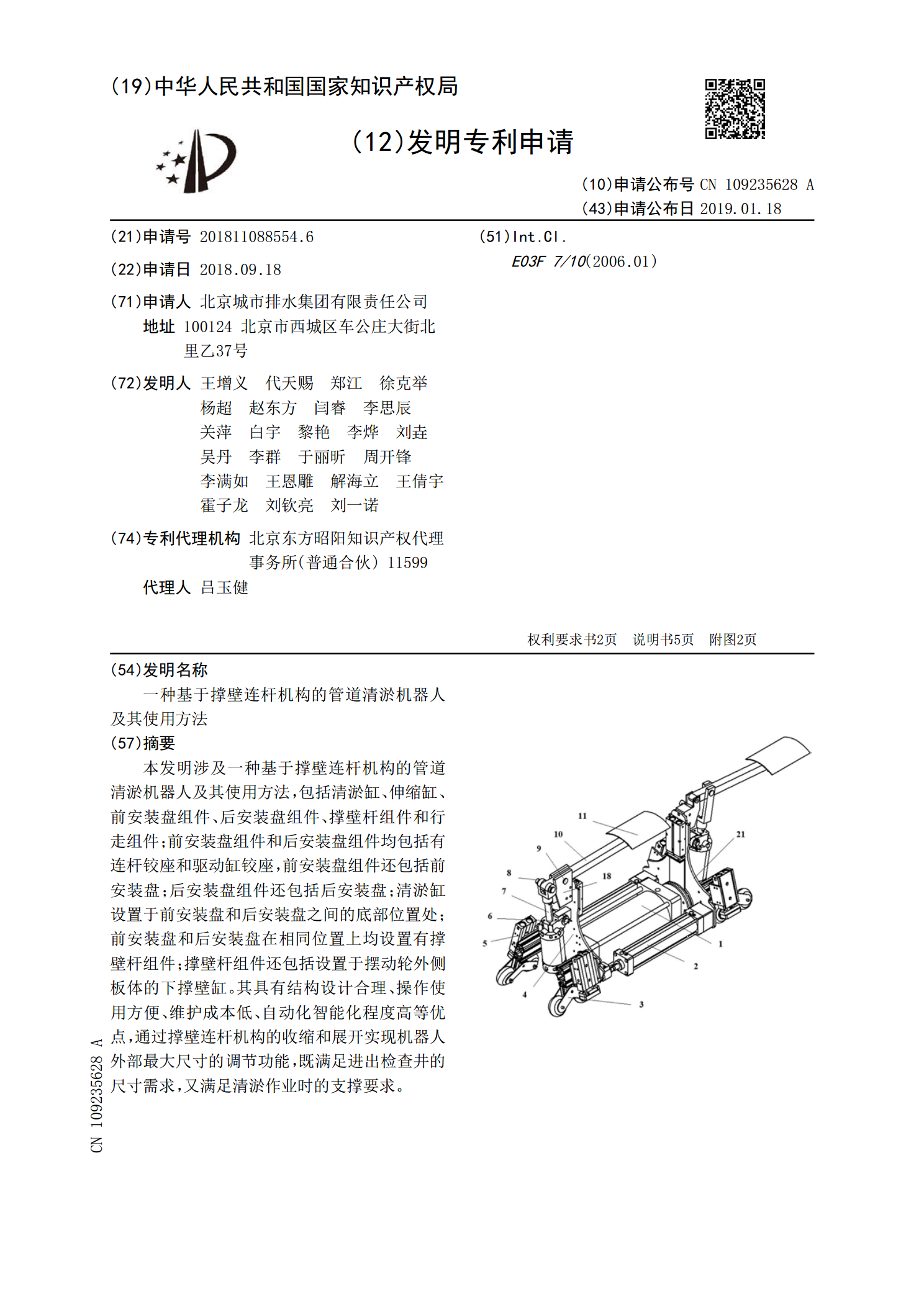
一种基于撑壁连杆机构的管道清淤机器人及其使用方法.pdf
本发明涉及一种基于撑壁连杆机构的管道清淤机器人及其使用方法,包括清淤缸、伸缩缸、前安装盘组件、后安装盘组件、撑壁杆组件和行走组件;前安装盘组件和后安装盘组件均包括有连杆铰座和驱动缸铰座,前安装盘组件还包括前安装盘;后安装盘组件还包括后安装盘;清淤缸设置于前安装盘和后安装盘之间的底部位置处;前安装盘和后安装盘在相同位置上均设置有撑壁杆组件;撑壁杆组件还包括设置于摆动轮外侧板体的下撑壁缸。其具有结构设计合理、操作使用方便、维护成本低、自动化智能化程度高等优点,通过撑壁连杆机构的收缩和展开实现机器人外部最大尺寸
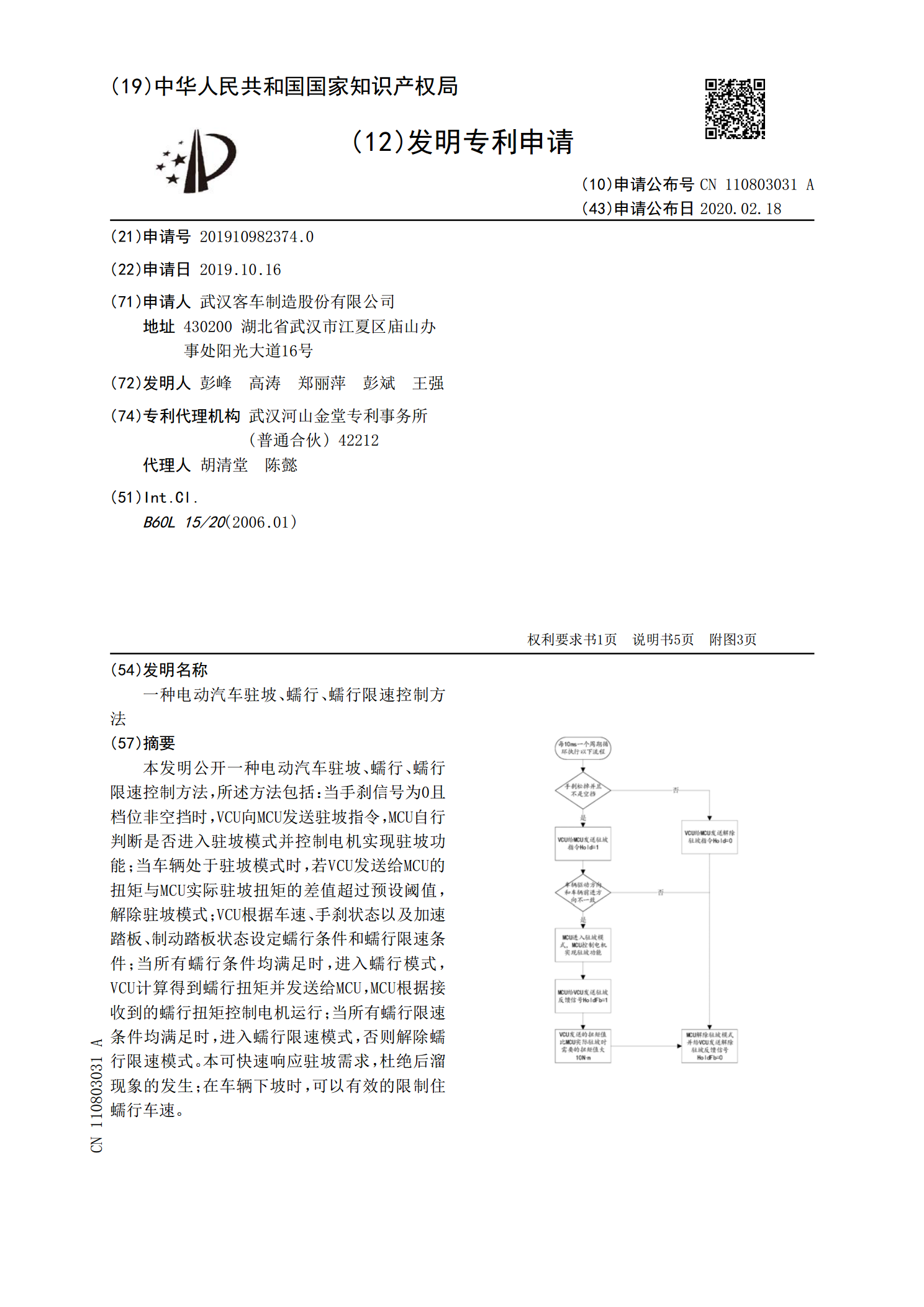
一种电动汽车驻坡、蠕行、蠕行限速控制方法.pdf
本发明公开一种电动汽车驻坡、蠕行、蠕行限速控制方法,所述方法包括:当手刹信号为0且档位非空挡时,VCU向MCU发送驻坡指令,MCU自行判断是否进入驻坡模式并控制电机实现驻坡功能;当车辆处于驻坡模式时,若VCU发送给MCU的扭矩与MCU实际驻坡扭矩的差值超过预设阈值,解除驻坡模式;VCU根据车速、手刹状态以及加速踏板、制动踏板状态设定蠕行条件和蠕行限速条件;当所有蠕行条件均满足时,进入蠕行模式,VCU计算得到蠕行扭矩并发送给MCU,MCU根据接收到的蠕行扭矩控制电机运行;当所有蠕行限速条件均满足时,进入蠕行