
一种可变构型的机器人爪掌.pdf

Ke****67


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可变构型的机器人爪掌.pdf
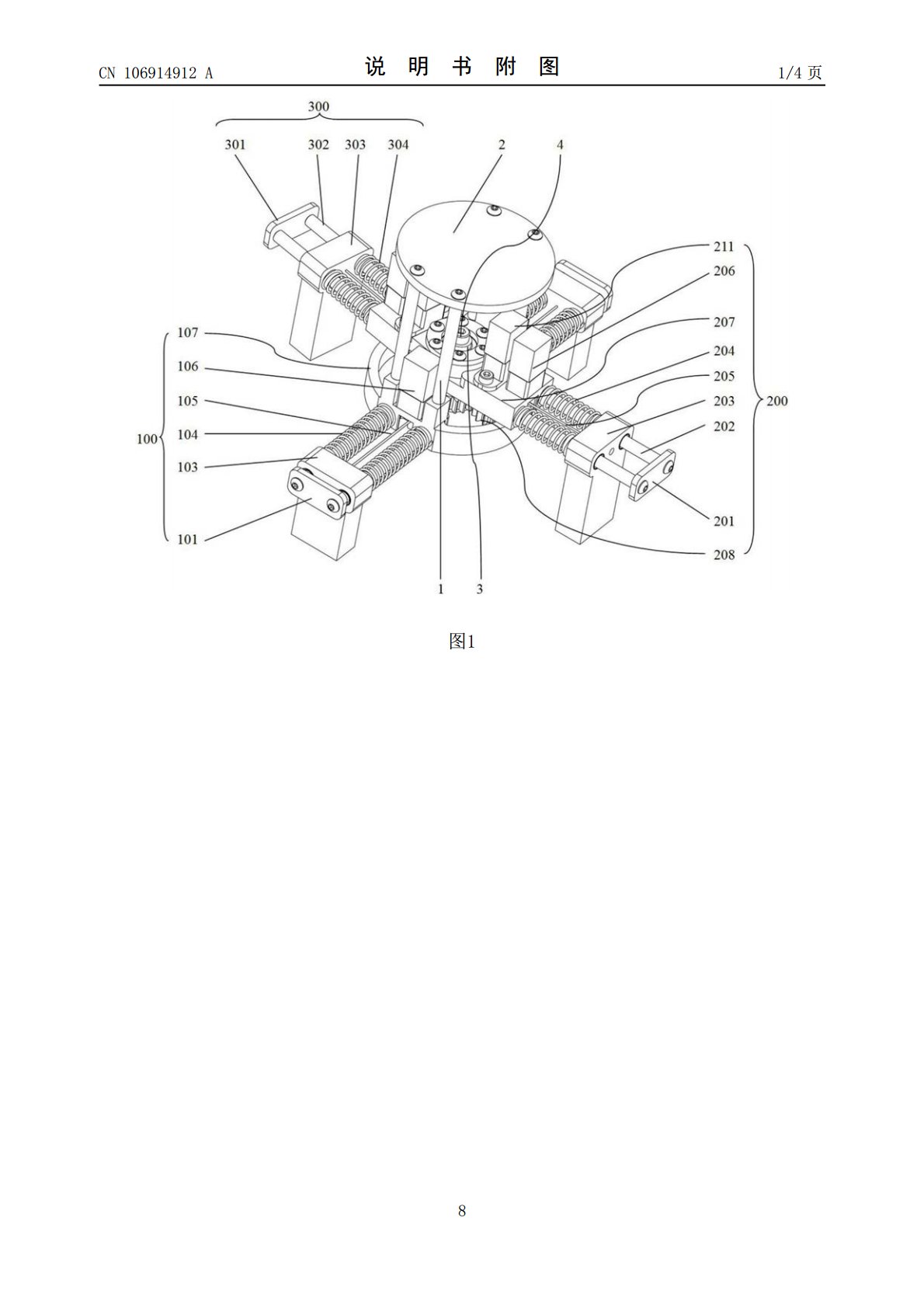
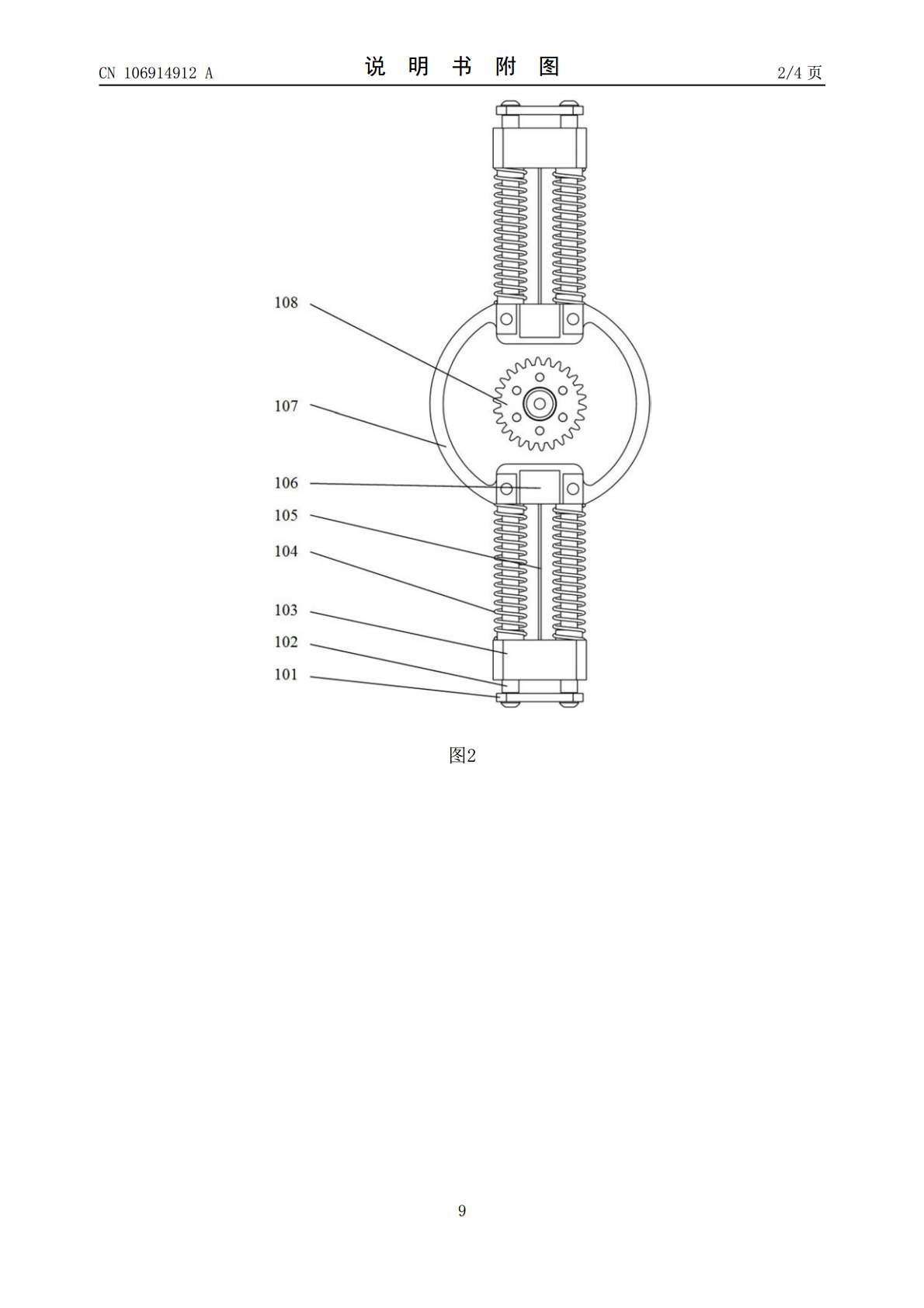
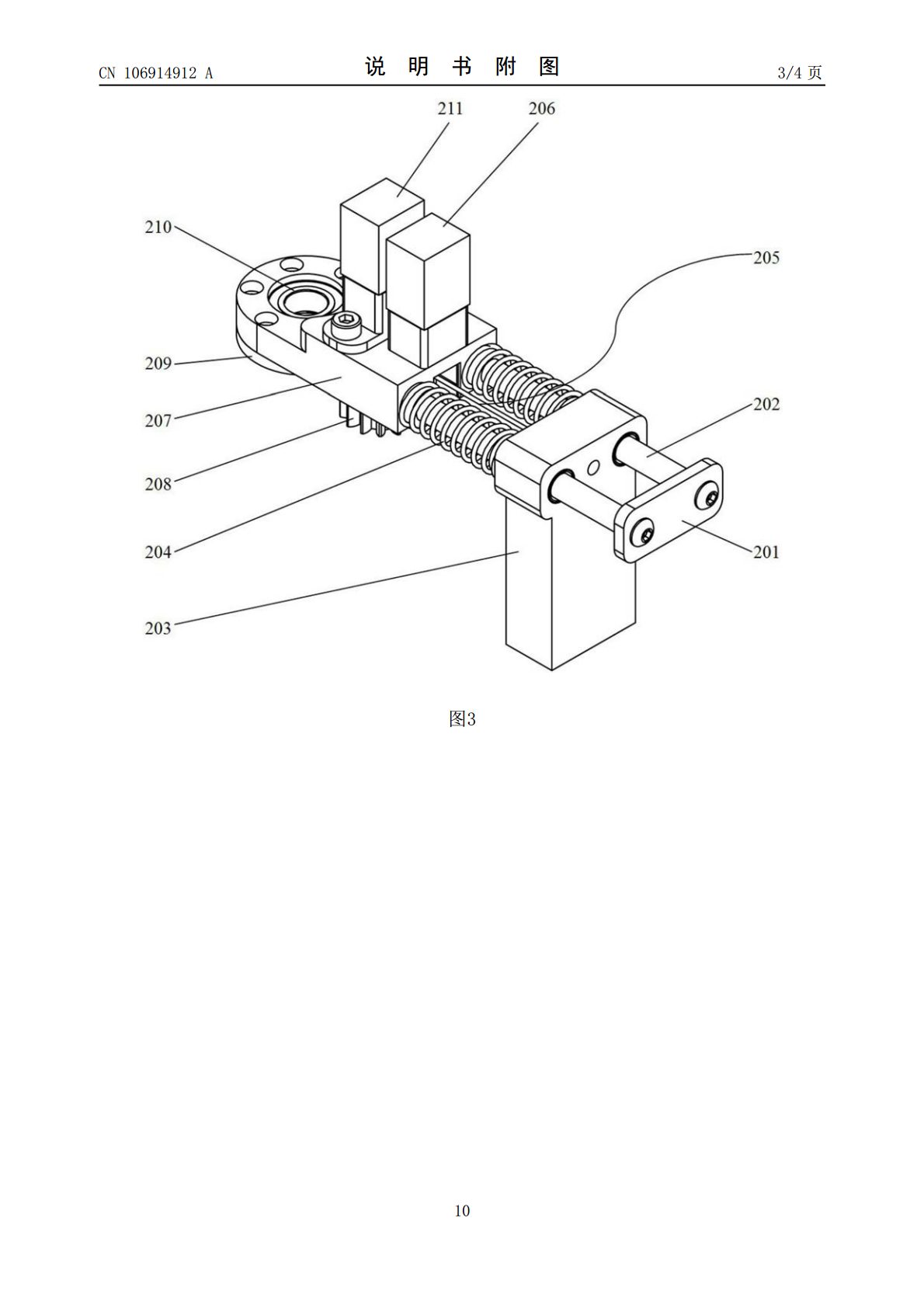
本发明公开一种可变构型的机器人爪掌,该机器人爪掌由一个非旋转部件100和两个旋转部件200和300组成,可实现爪掌的尺寸调整,以及针对复杂物体的抓取点位置调整。爪掌尺寸调整采用拉绳与弹簧相配的方法,当需要抓取物体时,手指驱动单元的输出轴会旋转,将拉绳卷绕在输出轴上,从而使拉绳拉动手指固定座沿导杆直线移动,调整手掌尺寸大小。当可变构型机器人爪掌机构释放物体时,手指驱动单元的输出轴反向旋转,手指固定座会在弹簧的作用下回到初始位置。爪掌位置调整采用齿轮啮合的形式,通过旋转部件上的旋转驱动齿轮自转,带动自身绕固定

一种可变构型轮式机器人结构.pdf
一种可变构型轮式机器人结构,属于机器人技术领域。用于提高机器人的越障能力。该机器人结构,包括躯体部分、支腿部分及配件部分;所述支腿部分安装在躯体部分上,且支腿部分采用由电机直驱的多自由度轮腿结构,为机器人提供跨越能力,所述配件部分安装在躯体部分上,为机器人提供获取信息和传输信息的能力。本发明的机器人同时具有较强的越障能力和较高的速度,支腿部分采用轮腿复合的结构,腿部运动能力可帮助机器人跨越障碍物,具有较强的地形适应能力。具有极强的变形能力,可根据不同的环境和需求,改变机器人的结构,可以使机器人体积变小从而

一种主臂可变构型履带机器人.pdf
本发明公开了一种主臂可变构型履带机器人,包括车体,及设置于车体内部的平台驱动电机、第一减速箱、双出轴涡轮减速箱、主臂电机、轮腿电机和第二减速箱;所述双输出涡轮减速箱的两侧通过连接杆连接有可伸缩主臂;所述第一减速箱通过传输轴与可伸缩主臂的一端连接;所述平台驱动电机通过第一减速箱与驱动轮连接;所述双输出涡轮减速箱与主臂电机电连接;所述轮腿电机通过第二减速箱与三角轮轮腿机构和从动轮连接。本发明的主臂可变构型履带机器人,通过引入摆臂三角轮机构丰富了构型变化,提高机器人的越障性能,对机器人攀爬台阶、斜坡及爬越沟道的

一种可变构型的两栖微小型探测机器人.pdf
一种可变构型的两栖微小型探测机器人,包括支撑架、两个滑动足、两个跳跃足、两个电机驱动模块、两个电润湿垫和两套传动模块;两个滑动足和两个跳跃足分别对称安装在支撑架两侧,且滑动足运动平面与跳跃足运动平面呈垂直关系;每个电机通过一套传动模块与一个滑动足连接,用于控制滑动足的前后摆动;每个跳跃足一端连接在支撑架上,另一端安装在电润湿垫上,跳跃足通过导线与外部电源连接,通过控制外部电源电压实现跳跃足的跳跃。本发明可以在陆地上运动,也可以在水介质中及水面运动,同时能够实现陆地到水介质间的切换。本发明通过材料功能一体化
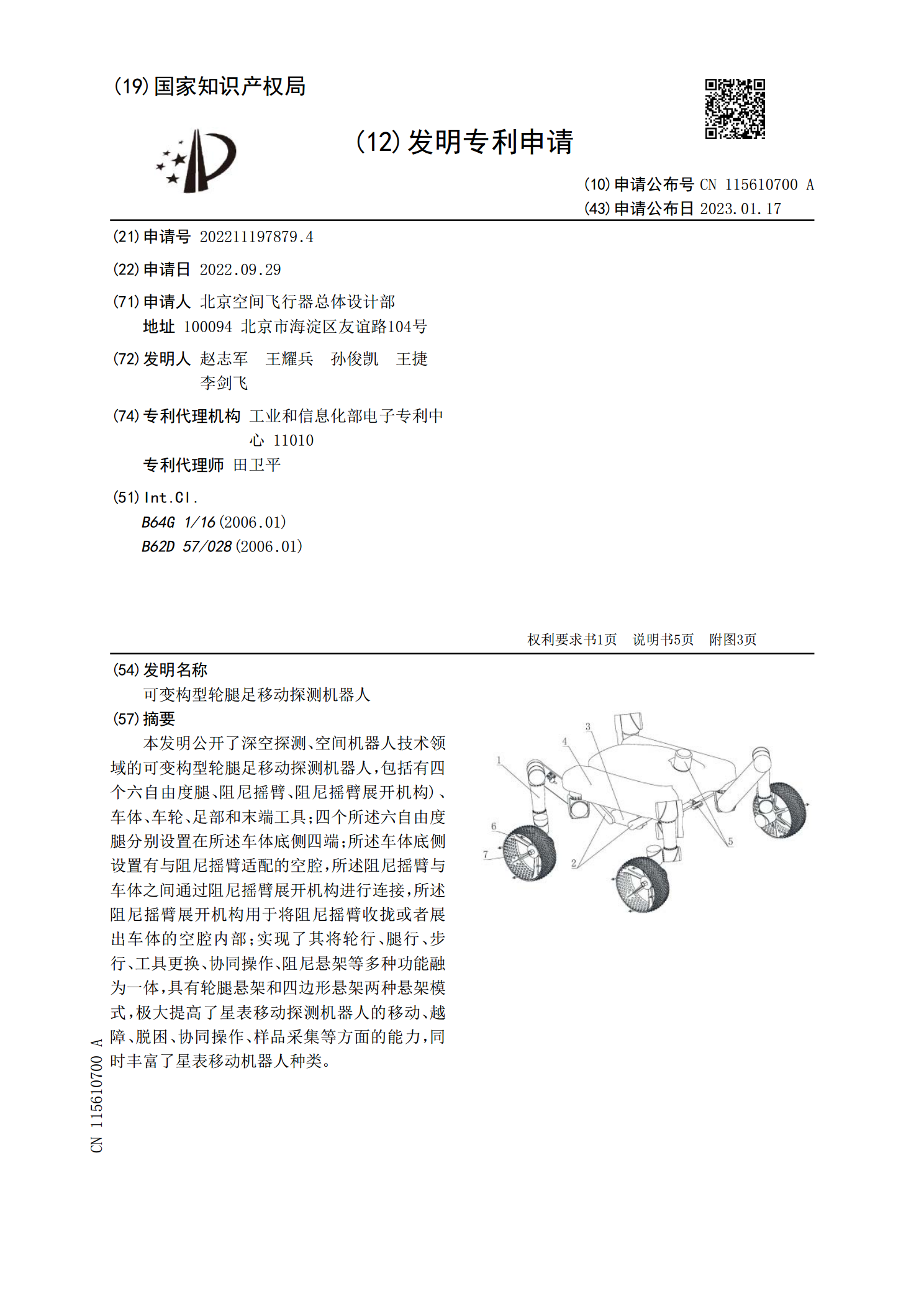
可变构型轮腿足移动探测机器人.pdf
本发明公开了深空探测、空间机器人技术领域的可变构型轮腿足移动探测机器人,包括有四个六自由度腿、阻尼摇臂、阻尼摇臂展开机构)、车体、车轮、足部和末端工具;四个所述六自由度腿分别设置在所述车体底侧四端;所述车体底侧设置有与阻尼摇臂适配的空腔,所述阻尼摇臂与车体之间通过阻尼摇臂展开机构进行连接,所述阻尼摇臂展开机构用于将阻尼摇臂收拢或者展出车体的空腔内部;实现了其将轮行、腿行、步行、工具更换、协同操作、阻尼悬架等多种功能融为一体,具有轮腿悬架和四边形悬架两种悬架模式,极大提高了星表移动探测机器人的移动、越障、脱