
一种可变构型轮式机器人结构.pdf

是飞****文章

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可变构型轮式机器人结构.pdf
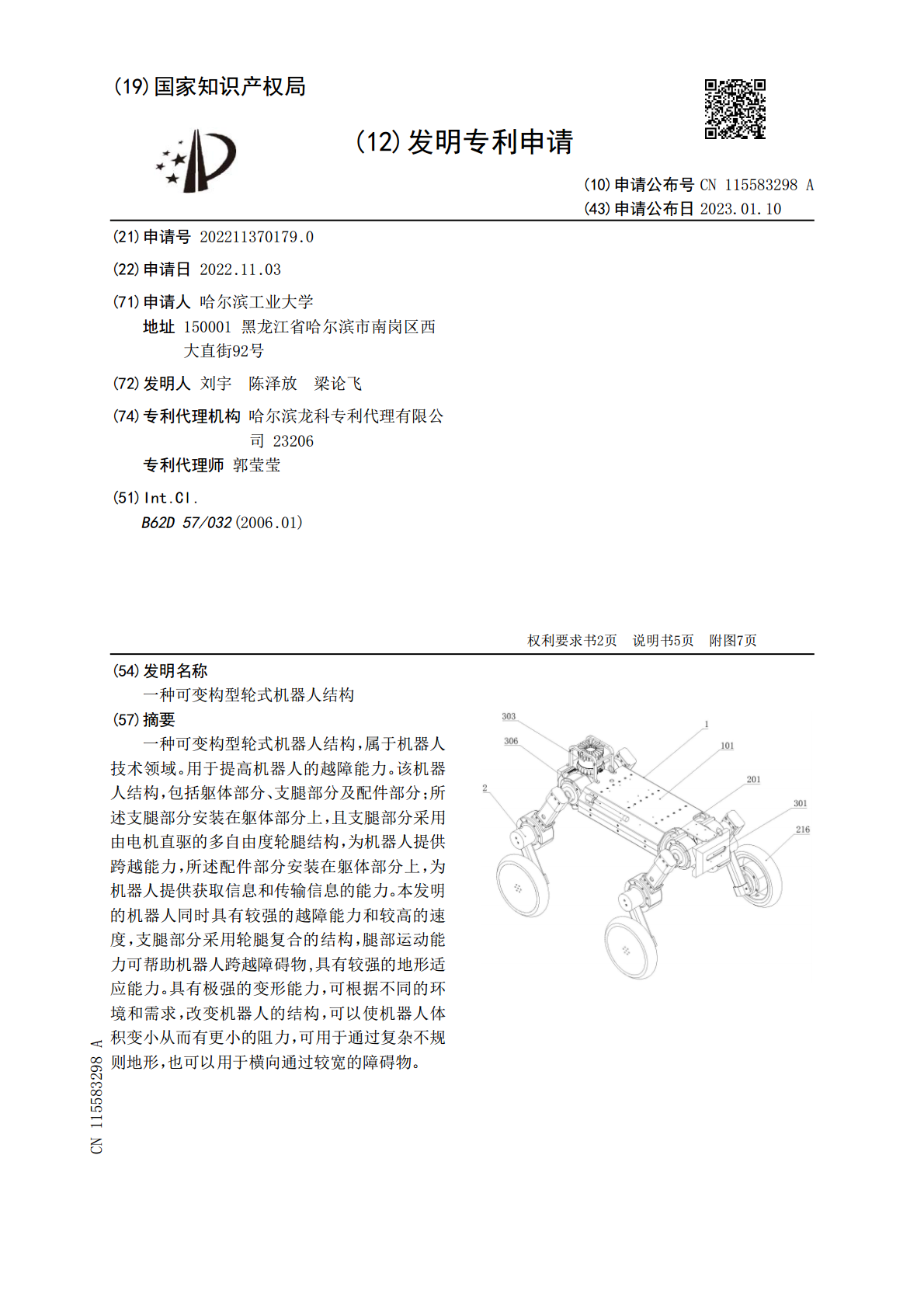
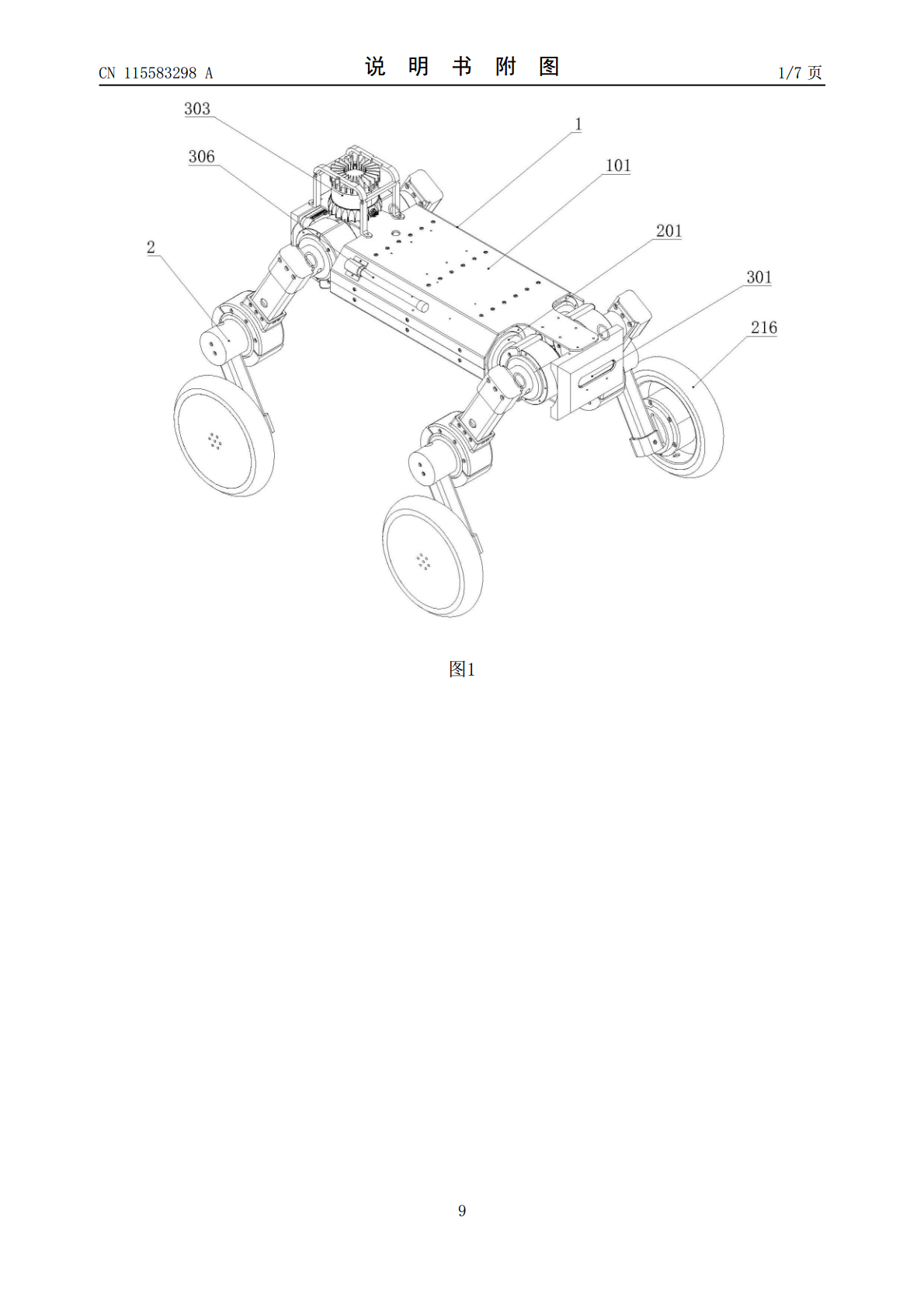
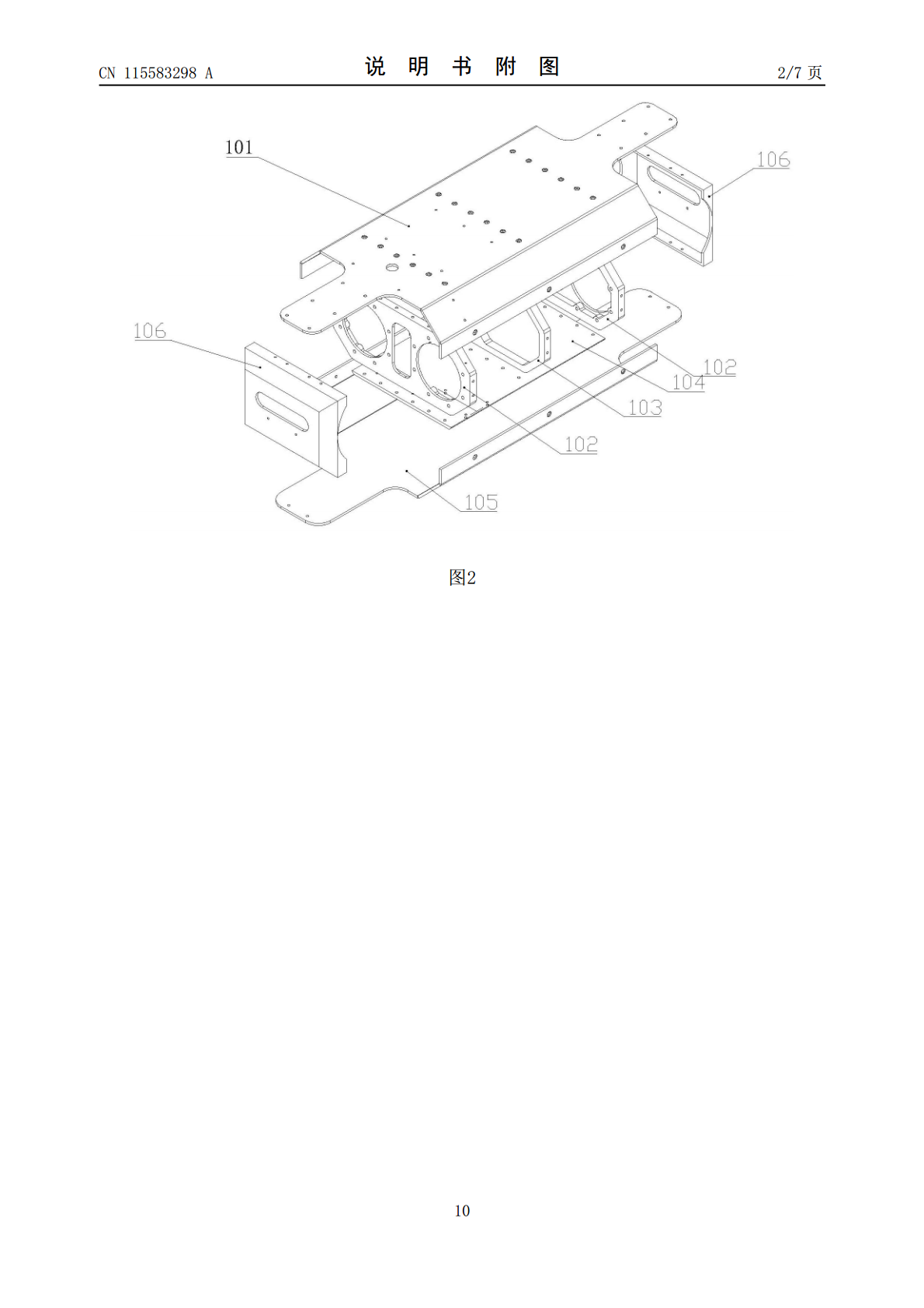
一种可变构型轮式机器人结构,属于机器人技术领域。用于提高机器人的越障能力。该机器人结构,包括躯体部分、支腿部分及配件部分;所述支腿部分安装在躯体部分上,且支腿部分采用由电机直驱的多自由度轮腿结构,为机器人提供跨越能力,所述配件部分安装在躯体部分上,为机器人提供获取信息和传输信息的能力。本发明的机器人同时具有较强的越障能力和较高的速度,支腿部分采用轮腿复合的结构,腿部运动能力可帮助机器人跨越障碍物,具有较强的地形适应能力。具有极强的变形能力,可根据不同的环境和需求,改变机器人的结构,可以使机器人体积变小从而
一种可变形轮式机器人.pdf
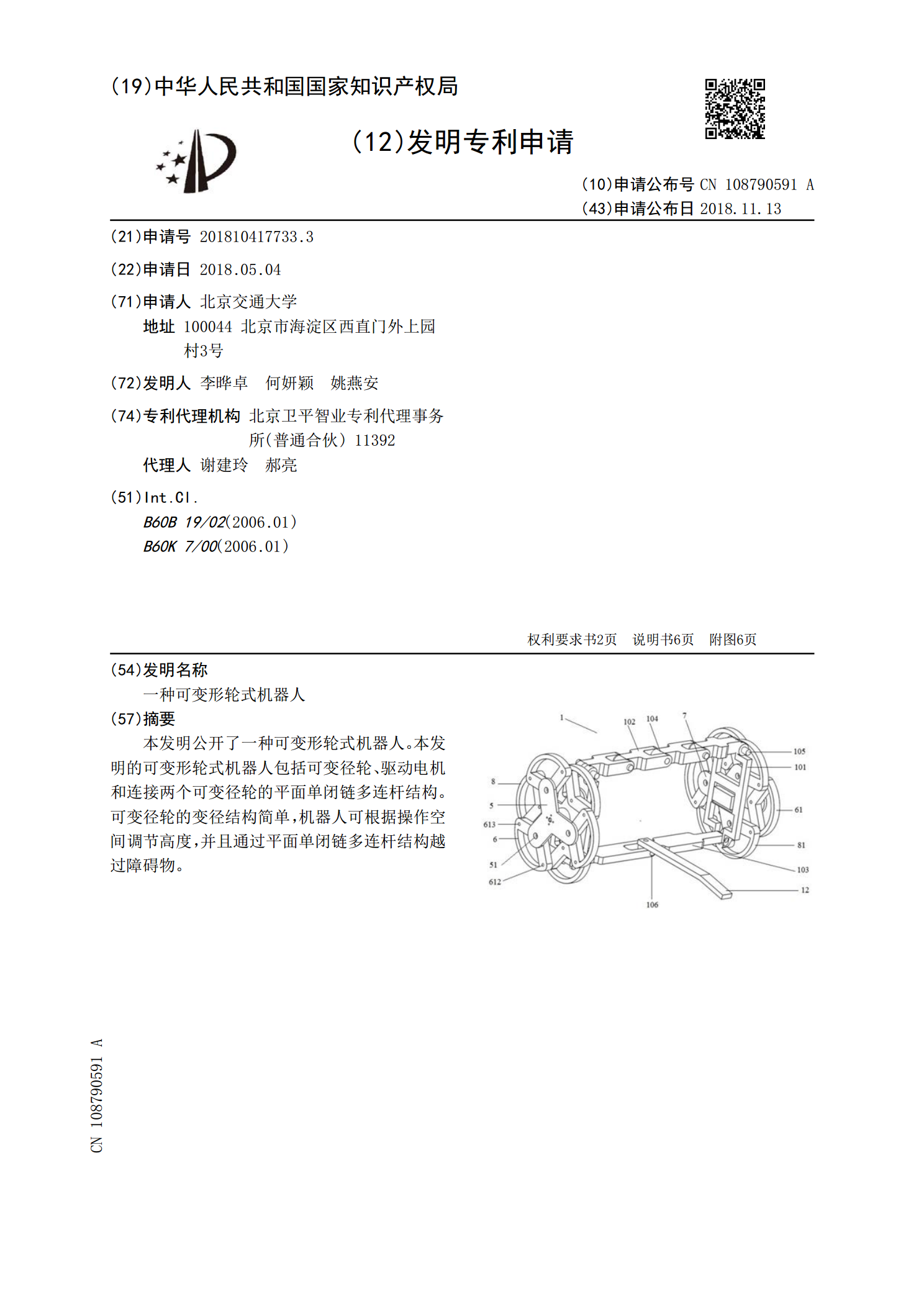
本发明公开了一种可变形轮式机器人。本发明的可变形轮式机器人包括可变径轮、驱动电机和连接两个可变径轮的平面单闭链多连杆结构。可变径轮的变径结构简单,机器人可根据操作空间调节高度,并且通过平面单闭链多连杆结构越过障碍物。

一种可变构型的机器人爪掌.pdf
本发明公开一种可变构型的机器人爪掌,该机器人爪掌由一个非旋转部件100和两个旋转部件200和300组成,可实现爪掌的尺寸调整,以及针对复杂物体的抓取点位置调整。爪掌尺寸调整采用拉绳与弹簧相配的方法,当需要抓取物体时,手指驱动单元的输出轴会旋转,将拉绳卷绕在输出轴上,从而使拉绳拉动手指固定座沿导杆直线移动,调整手掌尺寸大小。当可变构型机器人爪掌机构释放物体时,手指驱动单元的输出轴反向旋转,手指固定座会在弹簧的作用下回到初始位置。爪掌位置调整采用齿轮啮合的形式,通过旋转部件上的旋转驱动齿轮自转,带动自身绕固定
具有可变形车架结构的轮式越障机器人.pdf
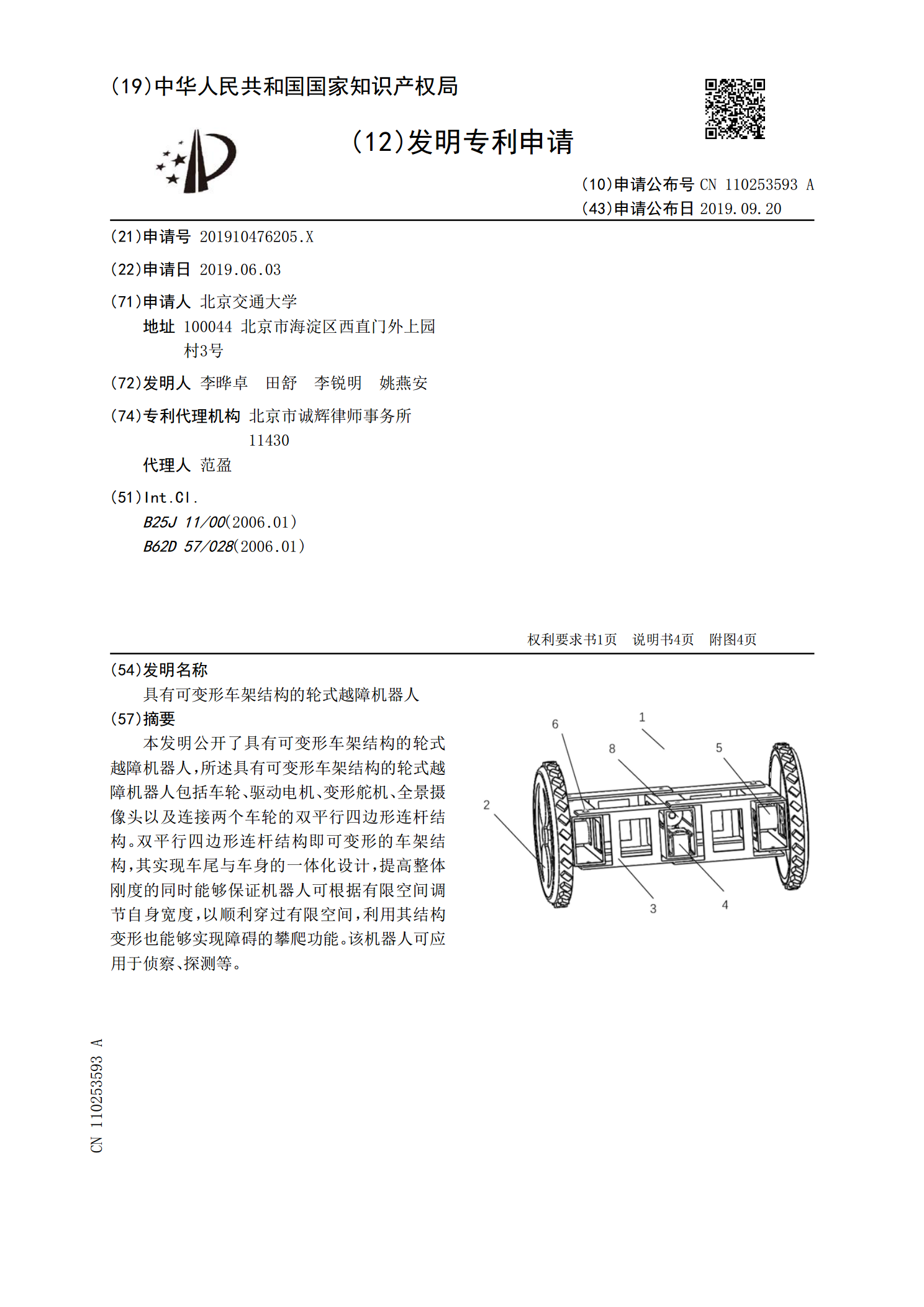
本发明公开了具有可变形车架结构的轮式越障机器人,所述具有可变形车架结构的轮式越障机器人包括车轮、驱动电机、变形舵机、全景摄像头以及连接两个车轮的双平行四边形连杆结构。双平行四边形连杆结构即可变形的车架结构,其实现车尾与车身的一体化设计,提高整体刚度的同时能够保证机器人可根据有限空间调节自身宽度,以顺利穿过有限空间,利用其结构变形也能够实现障碍的攀爬功能。该机器人可应用于侦察、探测等。

一种主臂可变构型履带机器人.pdf
本发明公开了一种主臂可变构型履带机器人,包括车体,及设置于车体内部的平台驱动电机、第一减速箱、双出轴涡轮减速箱、主臂电机、轮腿电机和第二减速箱;所述双输出涡轮减速箱的两侧通过连接杆连接有可伸缩主臂;所述第一减速箱通过传输轴与可伸缩主臂的一端连接;所述平台驱动电机通过第一减速箱与驱动轮连接;所述双输出涡轮减速箱与主臂电机电连接;所述轮腿电机通过第二减速箱与三角轮轮腿机构和从动轮连接。本发明的主臂可变构型履带机器人,通过引入摆臂三角轮机构丰富了构型变化,提高机器人的越障性能,对机器人攀爬台阶、斜坡及爬越沟道的