
工业机器人高刚性少齿差减速器.pdf

Ja****20


1/8

2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
工业机器人高刚性少齿差减速器.pdf
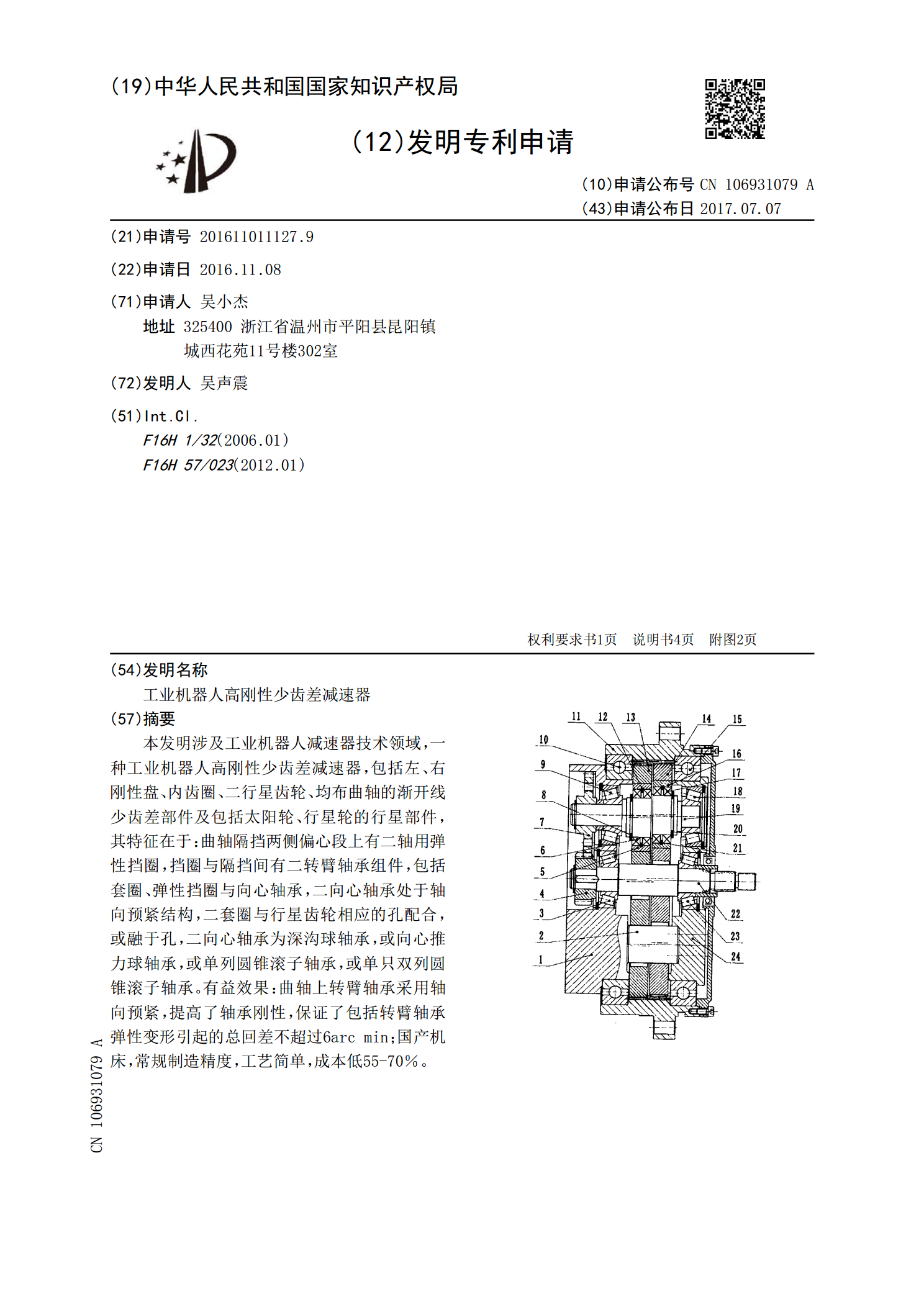
本发明涉及工业机器人减速器技术领域,一种工业机器人高刚性少齿差减速器,包括左、右刚性盘、内齿圈、二行星齿轮、均布曲轴的渐开线少齿差部件及包括太阳轮、行星轮的行星部件,其特征在于:曲轴隔挡两侧偏心段上有二轴用弹性挡圈,挡圈与隔挡间有二转臂轴承组件,包括套圈、弹性挡圈与向心轴承,二向心轴承处于轴向预紧结构,二套圈与行星齿轮相应的孔配合,或融于孔,二向心轴承为深沟球轴承,或向心推力球轴承,或单列圆锥滚子轴承,或单只双列圆锥滚子轴承。有益效果:曲轴上转臂轴承采用轴向预紧,提高了轴承刚性,保证了包括转臂轴承弹性变形

工业机器人高刚性中空少齿差减速器.pdf
本发明涉及工业机器人减速器技术领域,一种工业机器人高刚性中空少齿差减速器,包括左、右刚性盘、内齿圈、行星齿轮、曲轴的渐开线少齿差部件及包括太阳轮、行星轮的行星部件,其特征在于:刚性盘、行星齿轮、从动齿轮及太阳轮均有中心孔;曲轴隔挡两侧偏心段上有弹性挡圈,挡圈与隔挡间有转臂轴承组件,包括套圈、弹性挡圈与向心轴承,向心轴承轴向预,套圈与行星齿轮相应孔配合,或融于孔,向心轴承为深沟球轴承,或向心推力球轴承,或单列、或单只双列圆锥滚子轴承。有益效果:转臂轴承轴向预紧,提高了轴承刚性,保证了包括轴承弹性变形引起的回
工业机器人内斜齿组合曲轴式少齿差减速器.pdf
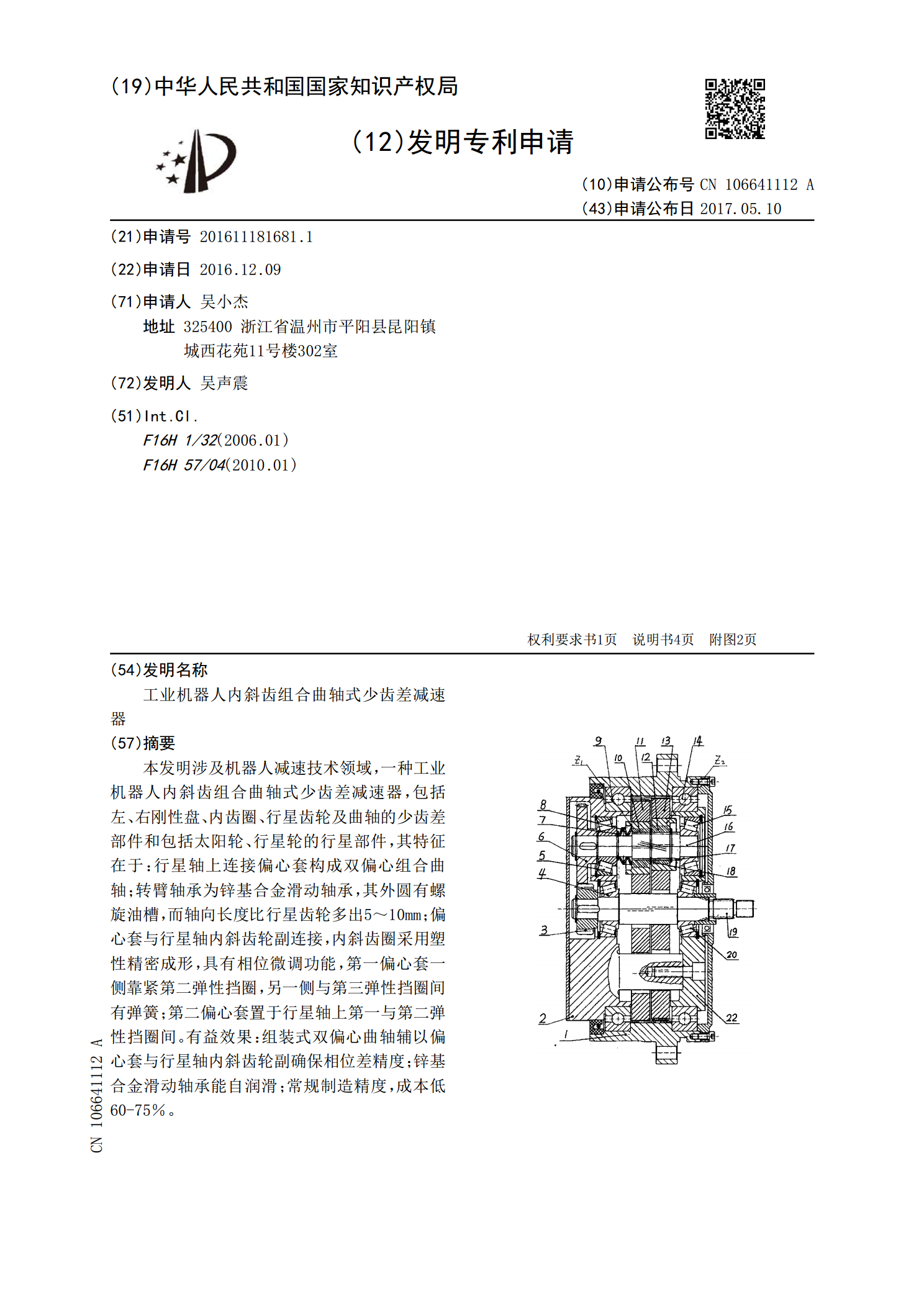
本发明涉及机器人减速技术领域,一种工业机器人内斜齿组合曲轴式少齿差减速器,包括左、右刚性盘、内齿圈、行星齿轮及曲轴的少齿差部件和包括太阳轮、行星轮的行星部件,其特征在于:行星轴上连接偏心套构成双偏心组合曲轴;转臂轴承为锌基合金滑动轴承,其外圆有螺旋油槽,而轴向长度比行星齿轮多出5~10mm;偏心套与行星轴内斜齿轮副连接,内斜齿圈采用塑性精密成形,具有相位微调功能,第一偏心套一侧靠紧第二弹性挡圈,另一侧与第三弹性挡圈间有弹簧;第二偏心套置于行星轴上第一与第二弹性挡圈间。有益效果:组装式双偏心曲轴辅以偏心套与

工业机器人端面齿组合曲轴式少齿差减速器.pdf
本发明涉及机器人减速技术领域,一种工业机器人端面齿组合曲轴式少齿差减速器,包括左、右刚性盘、内齿圈、行星齿轮及曲轴的少齿差部件和包括太阳轮、行星轮的行星部件,其特征在于:行星轴上组合偏心套,偏心套上用滑动轴承支承行星齿轮;偏心套与转臂滑动轴承为锌基合金,二者融为一体。偏心套长度比行星齿轮厚度多出5~10mm,偏心套外圆有螺旋槽;第一偏心套与行星轴滑配,其一端与第一挡圈间有弹簧,另一端与第二偏心套间系端面齿啮合连接,第二偏心套另一端靠紧第二挡圈,第二偏心套与行星轴连接。有益效果:双偏心组合曲轴辅以端面齿连接
工业机器人高刚性RV减速器.pdf
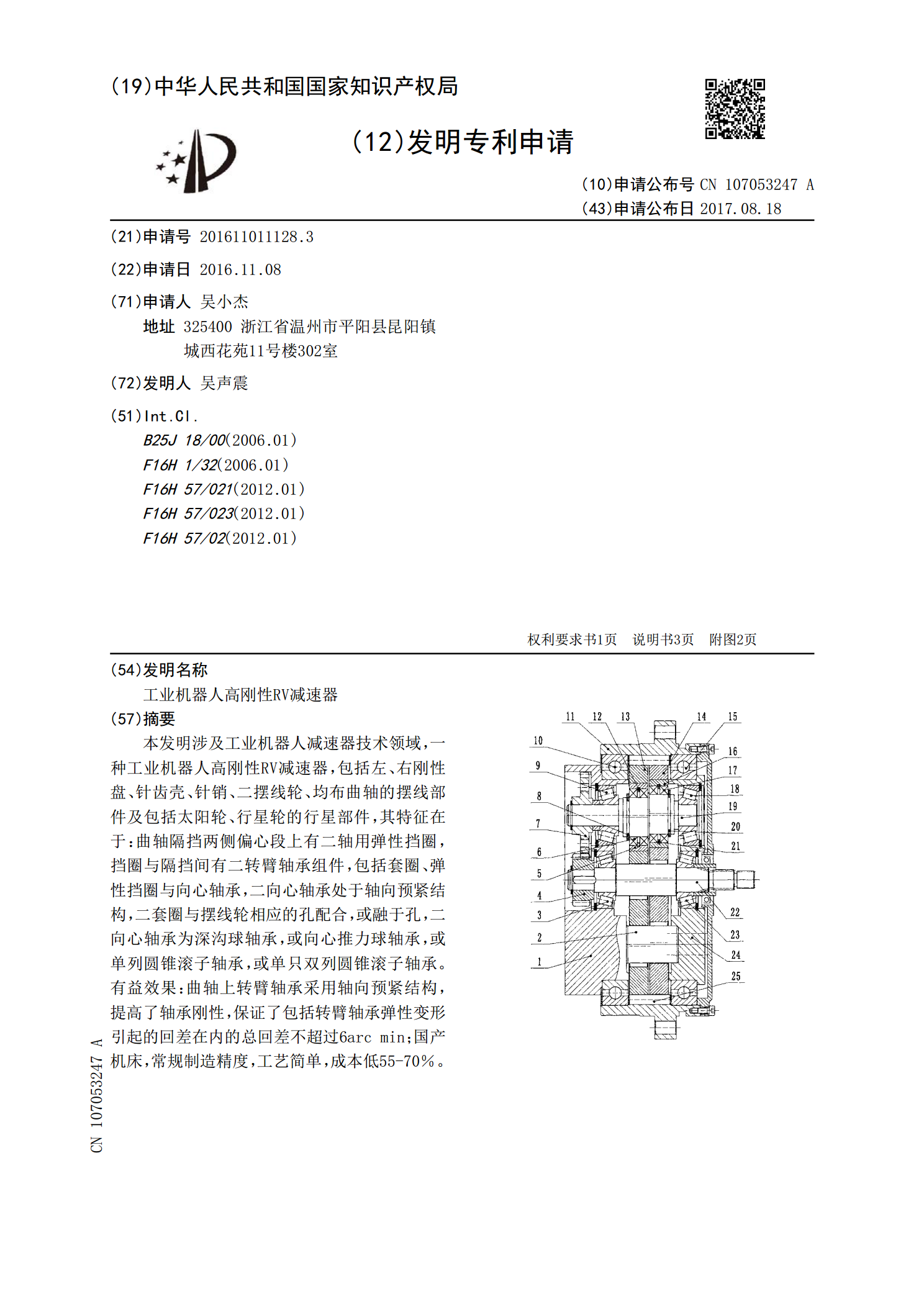
本发明涉及工业机器人减速器技术领域,一种工业机器人高刚性RV减速器,包括左、右刚性盘、针齿壳、针销、二摆线轮、均布曲轴的摆线部件及包括太阳轮、行星轮的行星部件,其特征在于:曲轴隔挡两侧偏心段上有二轴用弹性挡圈,挡圈与隔挡间有二转臂轴承组件,包括套圈、弹性挡圈与向心轴承,二向心轴承处于轴向预紧结构,二套圈与摆线轮相应的孔配合,或融于孔,二向心轴承为深沟球轴承,或向心推力球轴承,或单列圆锥滚子轴承,或单只双列圆锥滚子轴承。有益效果:曲轴上转臂轴承采用轴向预紧结构,提高了轴承刚性,保证了包括转臂轴承弹性变形引起