
一种多腔吸附的轮腿结合式爬壁机器人.pdf

一条****淑淑


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多腔吸附的轮腿结合式爬壁机器人.pdf
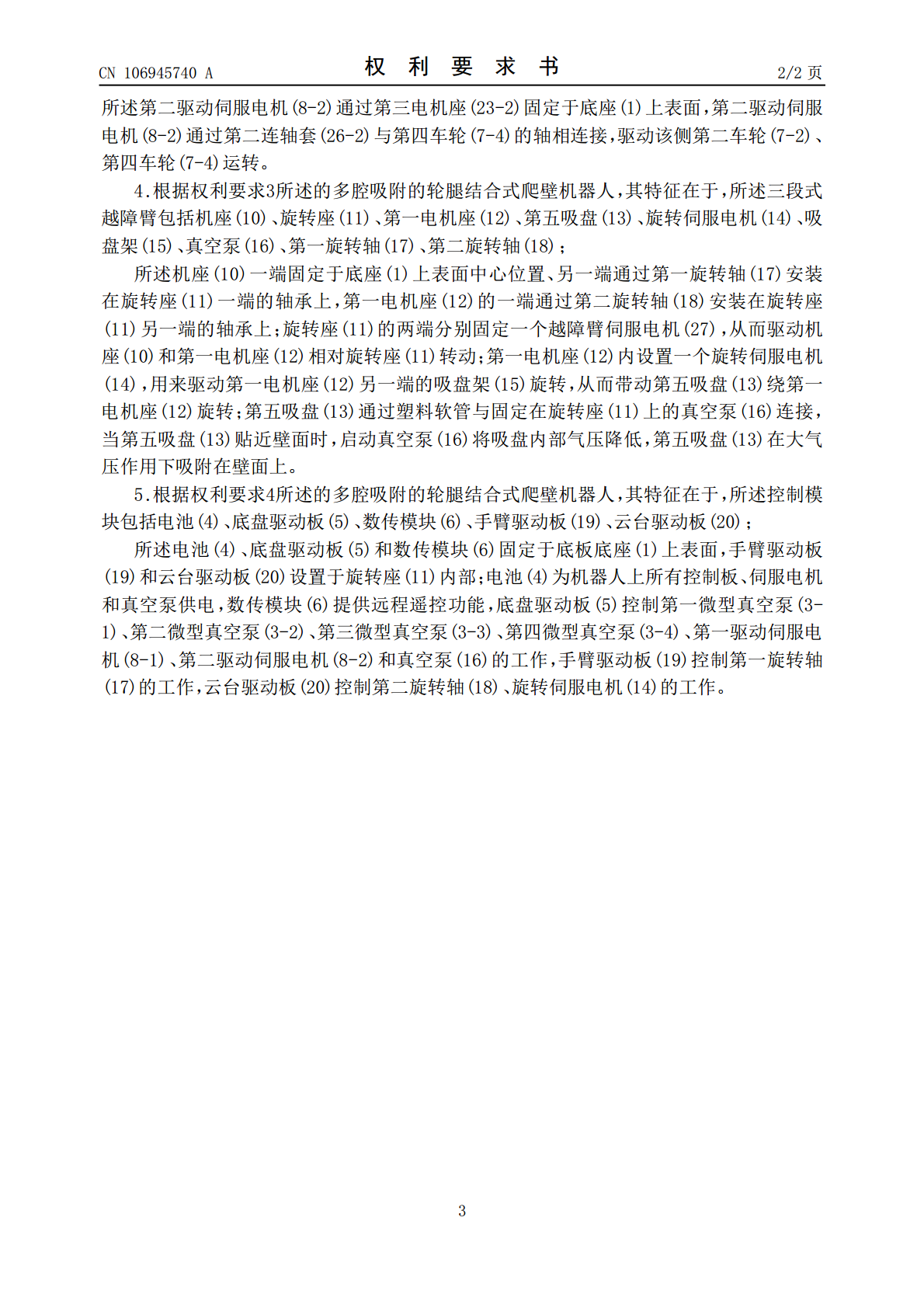
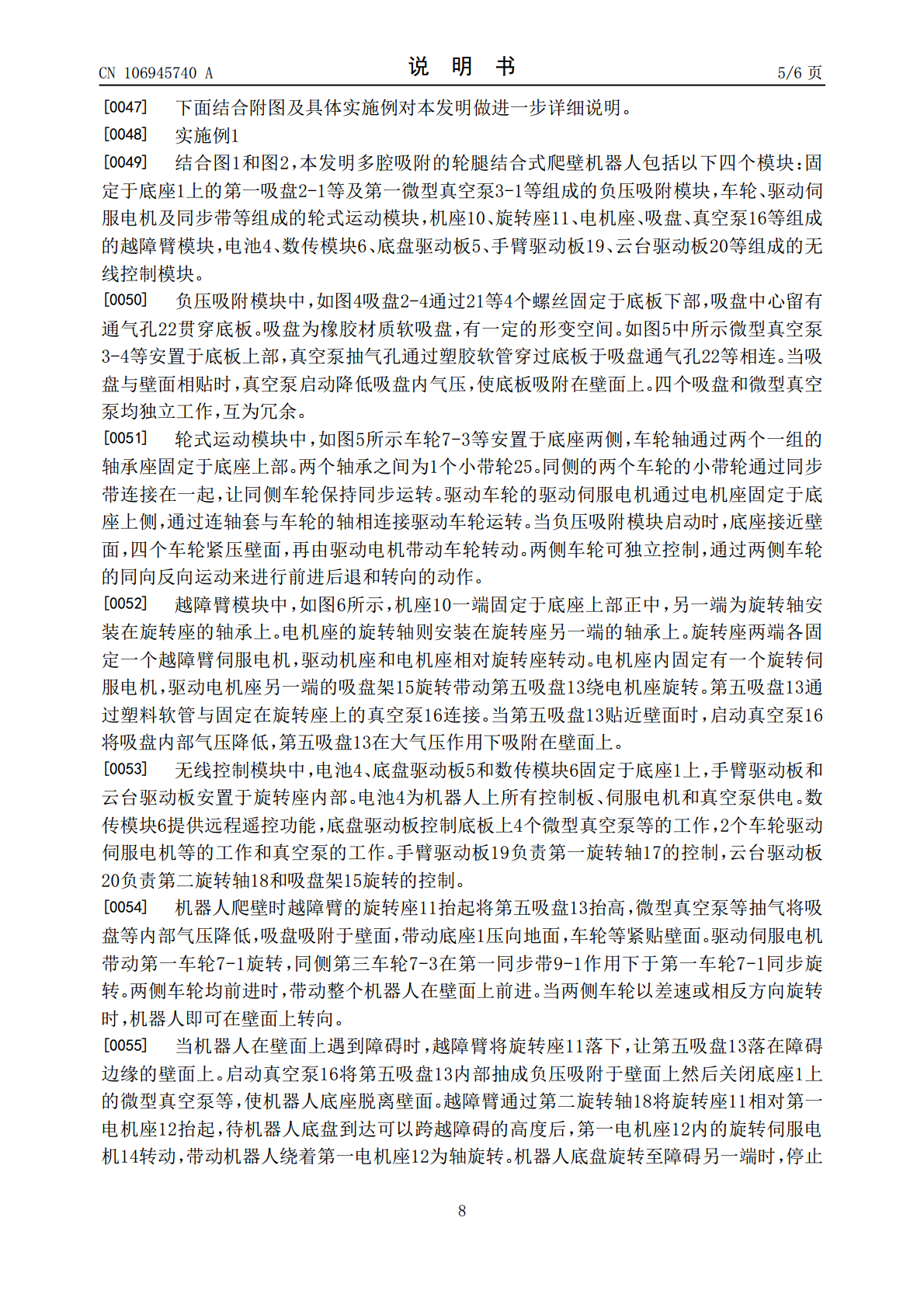
本发明公开了一种多腔吸附的轮腿结合式爬壁机器人。该爬壁机器人包括:多腔负压吸附底盘,包括多个由一个吸盘和一个微型真空泵形成的负压吸附腔,用于将机器人吸附于壁面上;轮式运动机构,安装在多腔负压吸附底盘上,用于驱动机器人前进后退和转向;三段式越障臂,为三段三自由度结构,一端固定在多腔负压吸附底盘上,另一端安装吸盘用于将机器人吸附于壁面上;控制模块,包括电池、数传模块和驱动板,电池用于供电,数传模块提供远程遥控功能,驱动板用于驱动轮式运动机构和三段式越障臂做出动作,并驱动多腔负压吸附底盘和三段式越障臂的吸盘吸附

多腔负压吸附型爬壁机器人.pdf
一种多腔负压吸附型爬壁机器人涉及一种机器人,特别涉及一种具有多腔室结构且利用负压吸附墙壁的机器人。本发明包括负压发生装置和驱动部分,其特征在于:所述的负压发生装置包括一个主负压发生装置和可拆卸的多个辅助负压发生装置,负压装置的高度可调且在其内安装有带风扇的交流电动机,在负压发生装置的下部安装弹性密封垫,在弹性密封垫上加装滚珠(28),所述的驱动部分放置于负压发生装置的外面;所述的爬壁机器人上携带一个滑轮。

一种用于爬壁机器人的非接触磁吸附轮腿复合机构.pdf
一种用于爬壁机器人的非接触磁吸附轮腿复合机构,包括两个轮式驱动机构、腿部转动机构、非接触磁吸附机构、两个连接法兰以及两个连接支架;两个轮式驱动机构分别通过连接法兰固装于腿部转动机构的两侧,非接触磁吸附机构放置于腿部转动机构下方并固装于两个轮式驱动机构之间,轮式驱动机构和非接触磁吸附机构可通过驱动腿部转动机构实现摆动,两个连接支架分别固装于腿部转动机构两侧。本发明既保证了轮式机构原有的运动灵活、平稳的特点,又使机构具有腿足式行走机构的越障能力;实现了磁吸附力的调节,提高了机构的移动灵活性;实现了机构对小曲率

一种用于爬壁机器人的磁吸附轮.pdf
一种用于爬壁机器人的磁吸附轮,在转轴外固定有阵列磁环,阵列磁环包括若干组磁阵列单元,每组磁阵列单元依次包括N极向心到S极的径向磁块、N极到S极的顺时针环向磁块、N极外向心到S极的径向磁块,N板到S极的逆时针环向磁块。磁吸附轮通过内部的永磁单元Halbach阵列原理进行排列,而通过本发明这种排列,可以最大化地增强磁吸附力。
越障爬壁机器人复合式变磁力吸附模块.pdf
本发明越障爬壁机器人复合式变磁力吸附模块,包括丝杠组件及吸附组件,丝杠组件采用电机‑带轮‑带‑带轮‑丝杠螺母‑丝杠的动力传递方式由丝杠螺母带动丝杠上下移动,进而带动吸附组件在车架外上下移动。本发明解决现有永磁爬壁机器人在大型金属立面作业时存在的磁力不可变问题,通过丝杠机构逆运动的应用,改善了以往永磁式爬壁机器人的永磁吸附机理,使机器人在越障过程中,磁铁磁力可随壁面障碍形状改变而改变,全地形适应性更加优良。改善了复合式变磁力吸附模块磁感线分布,提高了机器人运行期间的稳定性及安全性。通过运用电磁铁,更易于调节