
越障爬壁机器人复合式变磁力吸附模块.pdf

森林****来了


1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
越障爬壁机器人复合式变磁力吸附模块.pdf
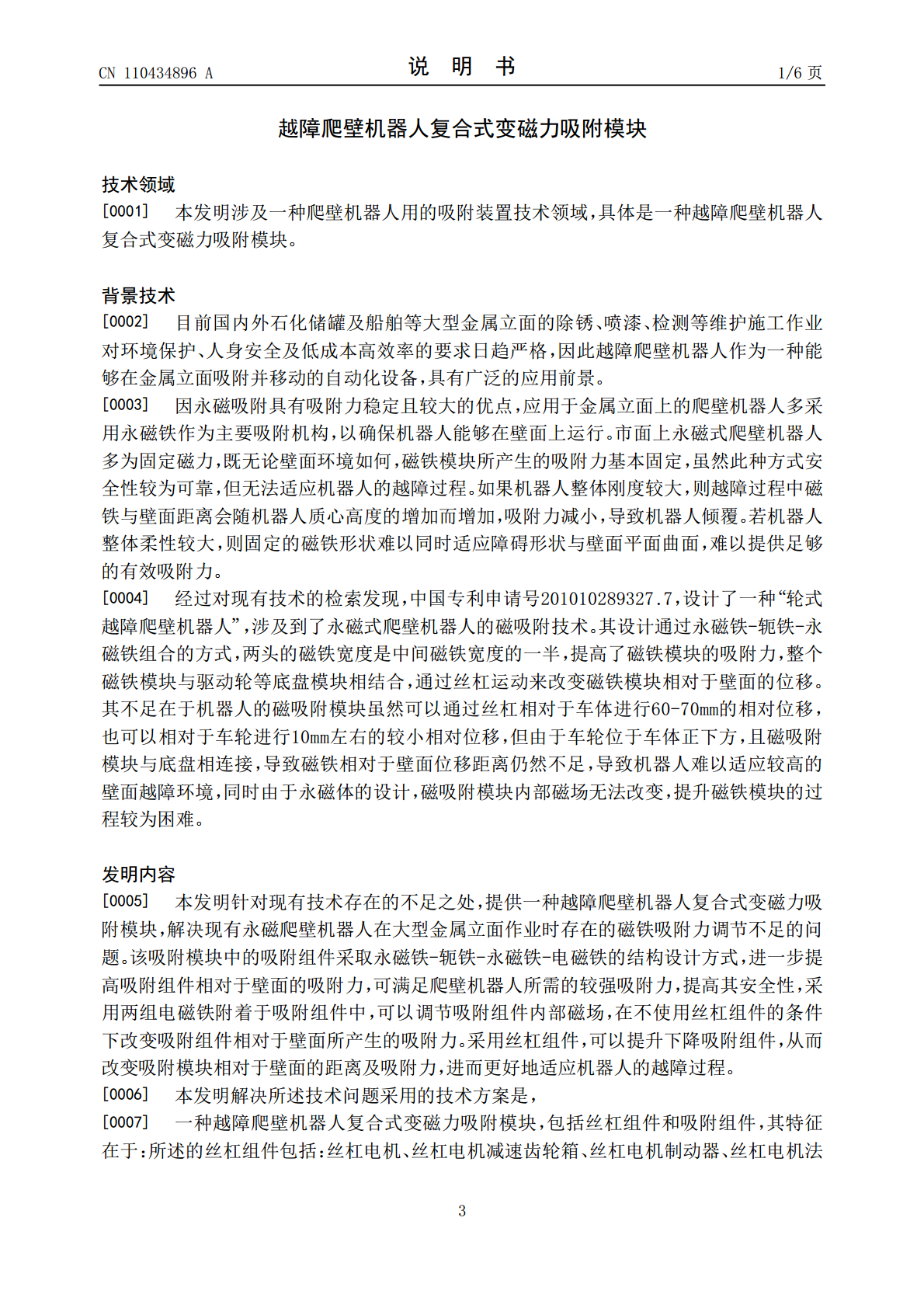
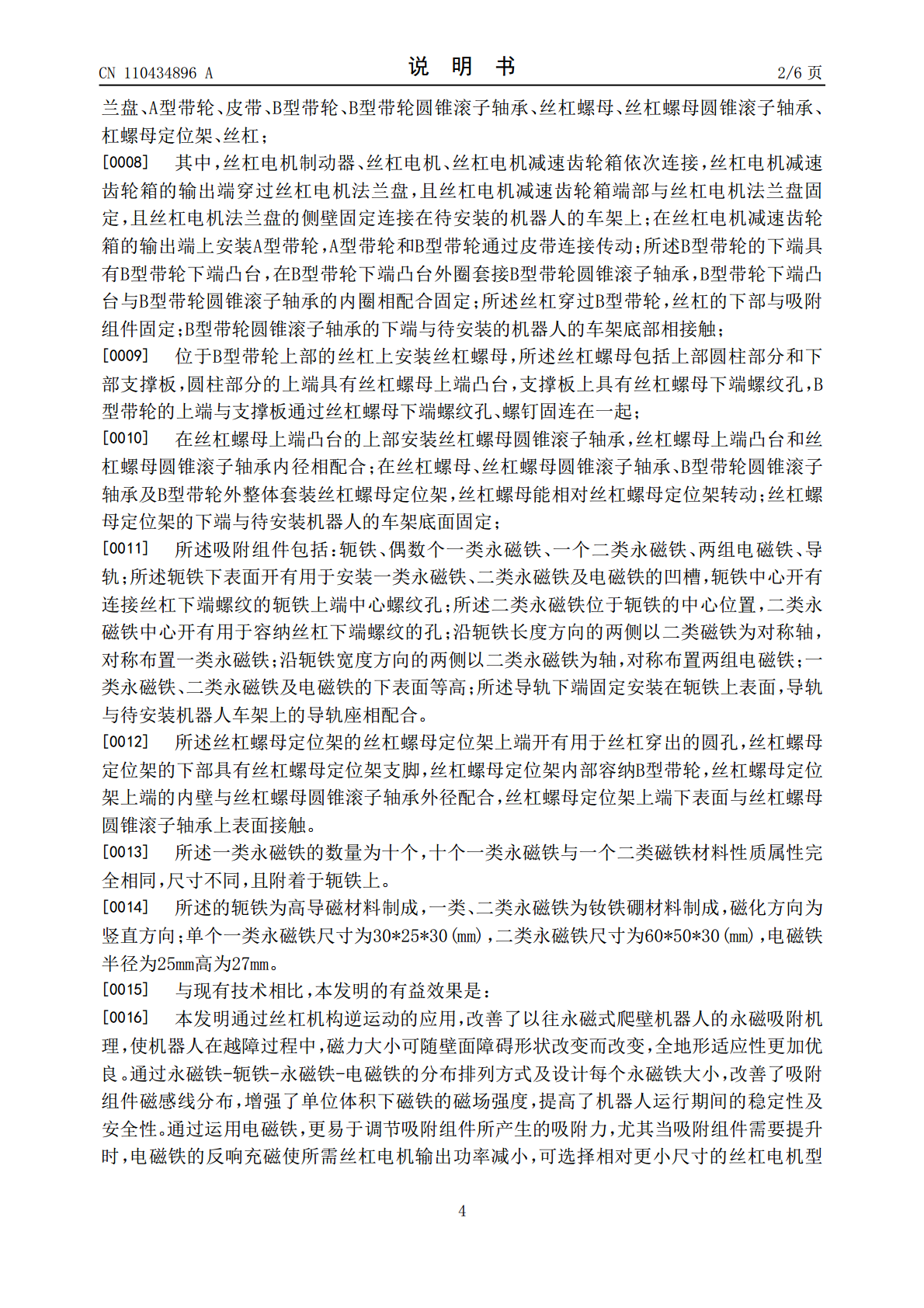
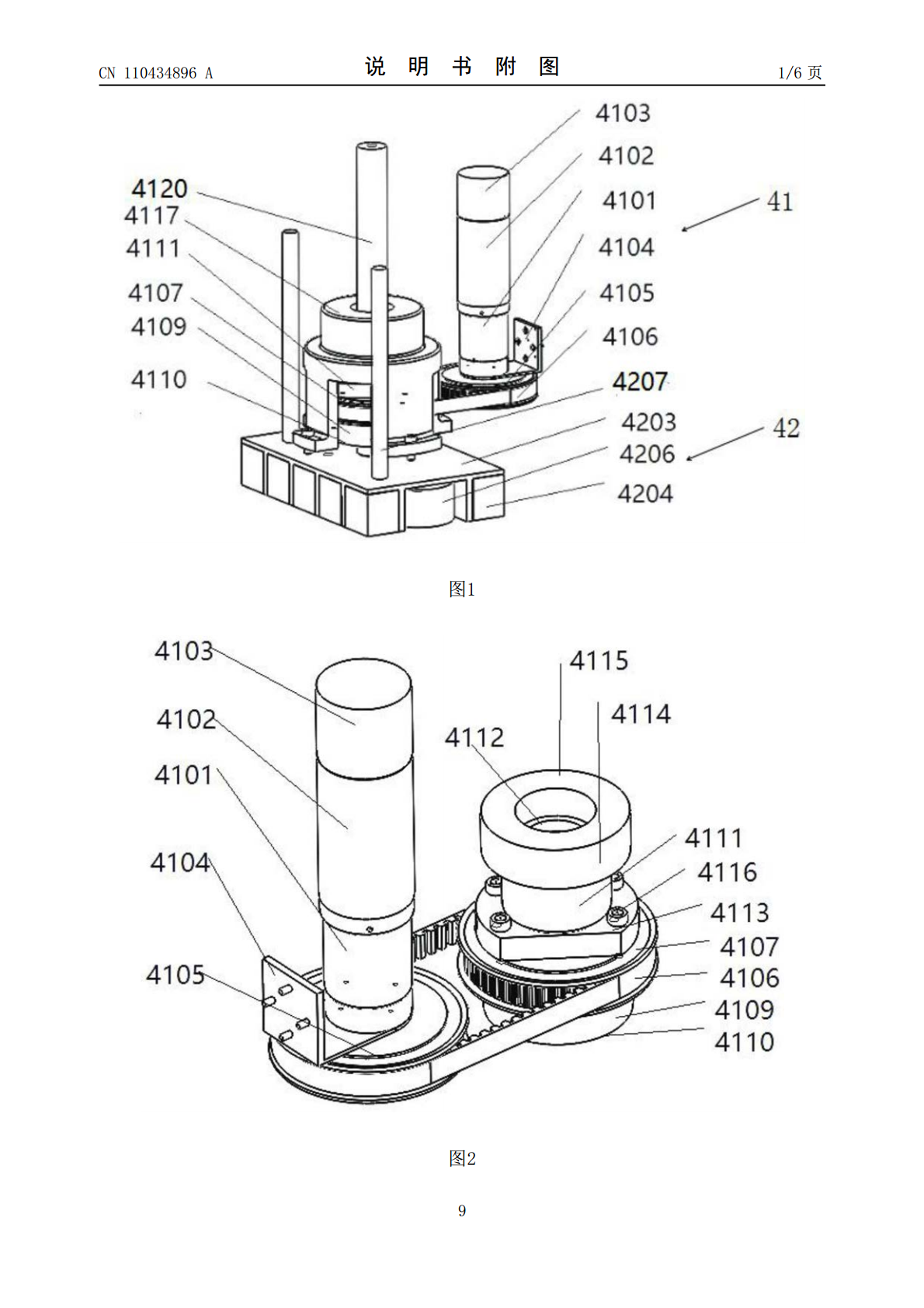
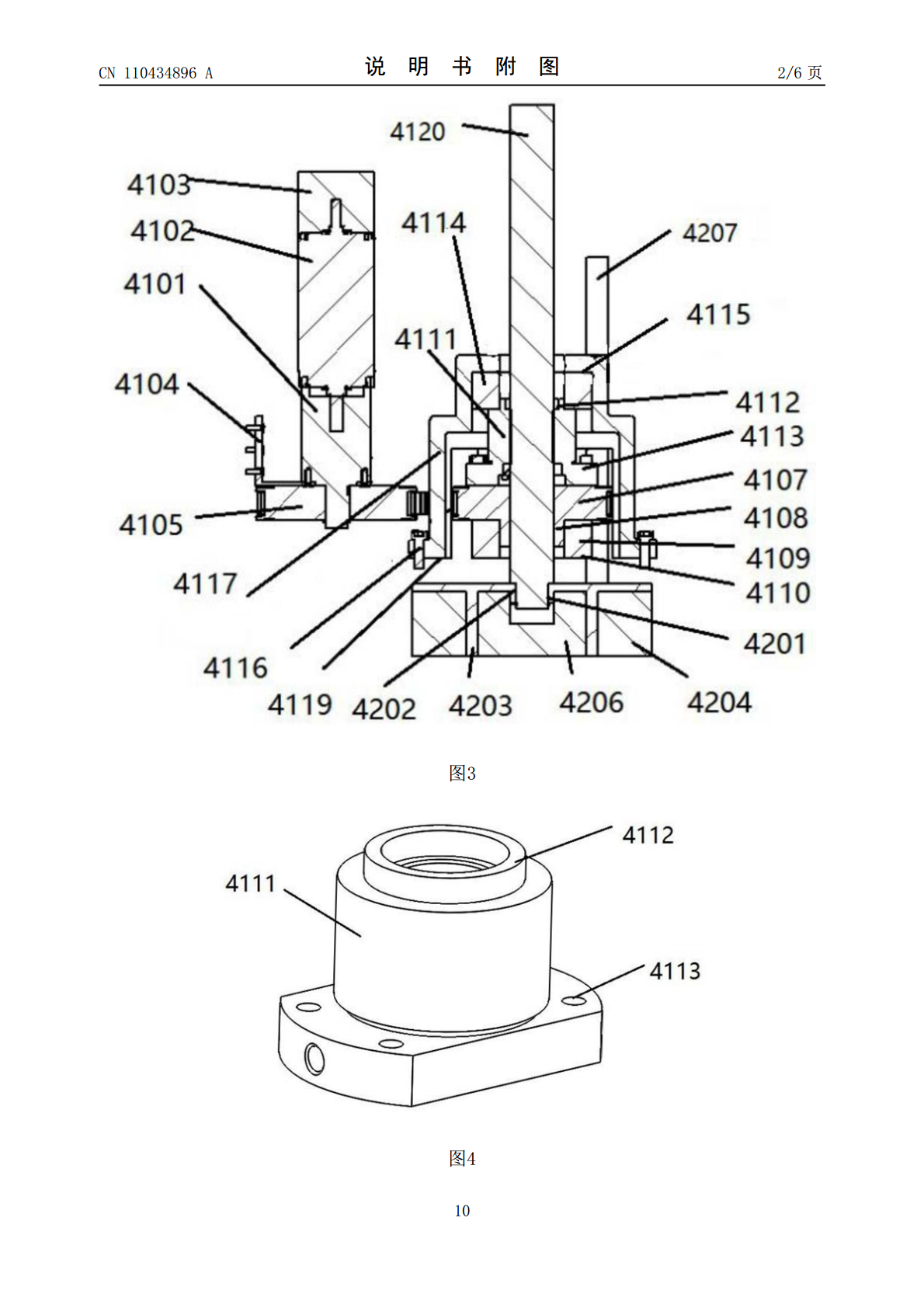
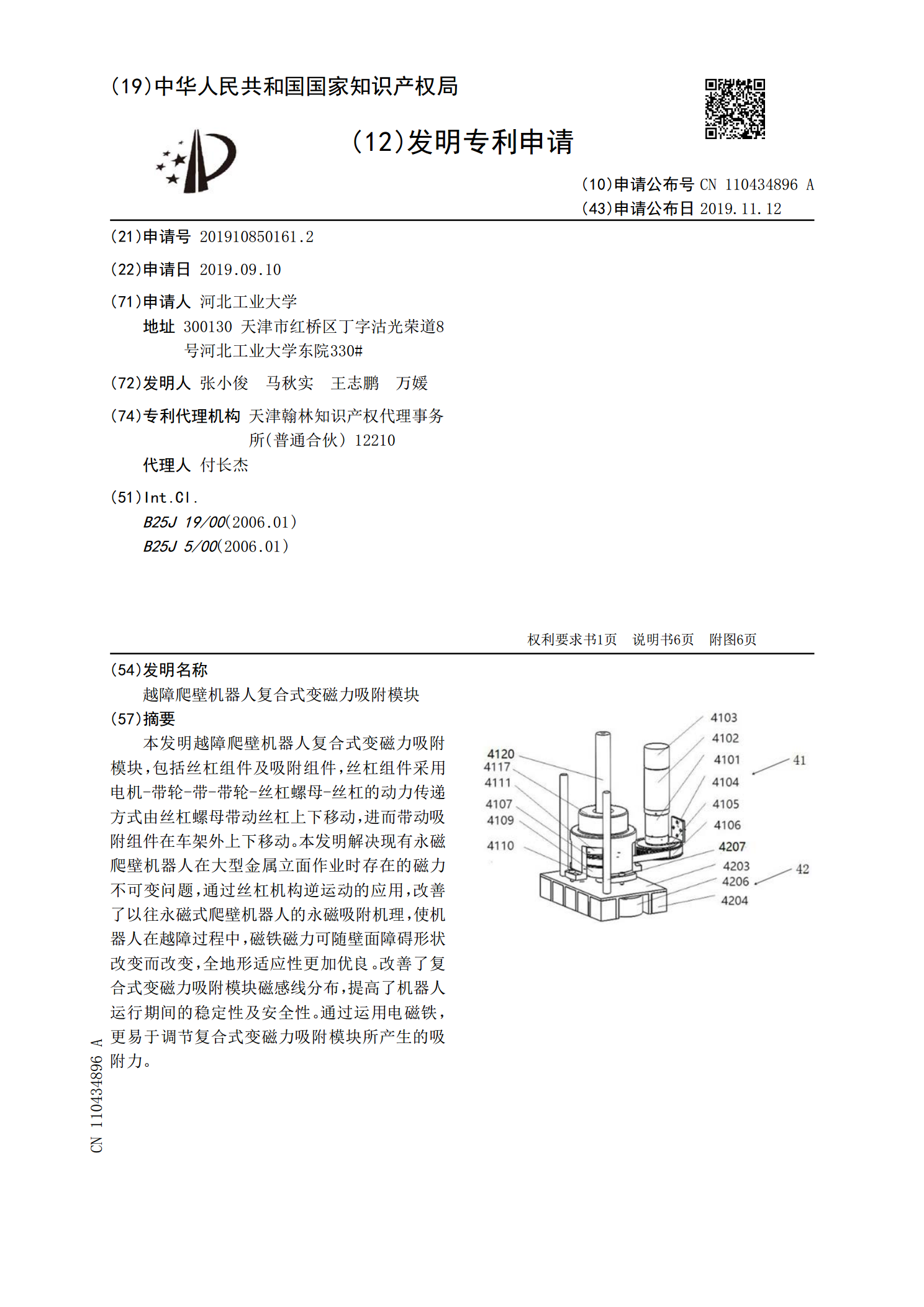
本发明越障爬壁机器人复合式变磁力吸附模块,包括丝杠组件及吸附组件,丝杠组件采用电机‑带轮‑带‑带轮‑丝杠螺母‑丝杠的动力传递方式由丝杠螺母带动丝杠上下移动,进而带动吸附组件在车架外上下移动。本发明解决现有永磁爬壁机器人在大型金属立面作业时存在的磁力不可变问题,通过丝杠机构逆运动的应用,改善了以往永磁式爬壁机器人的永磁吸附机理,使机器人在越障过程中,磁铁磁力可随壁面障碍形状改变而改变,全地形适应性更加优良。改善了复合式变磁力吸附模块磁感线分布,提高了机器人运行期间的稳定性及安全性。通过运用电磁铁,更易于调节

轮式越障爬壁机器人.pdf
一种机器人技术领域的轮式越障爬壁机器人,包括:机器人车架、三组移动吸附机构及其对应的直线滑轨、丝杠及驱动电机,三组直线滑轨以及丝杠竖直设置于机器人车架下方且两端分别与机器人车架及移动吸附机构相连,驱动电机与移动吸附机构固定连接。本发明解决现有爬壁机器人在垂直壁面作业时存在的问题,机器人既具有轮式移动机器人速度快和转向灵活、履带式移动机器人磁吸附力大的特点,同时还具有好的越障能力,能满足在复杂环境中运动和作业的需求。

一种光滑面可越障吸附式爬壁机器人.pdf
一种光滑面可越障吸附式爬壁机器人,其特征在于它包括检测模块、动力电池和控制模块、吸附机构、移动机构和越障控制机构;其工作方法包括:①负压产生吸附力使机器人吸附在壁面上;②对爬壁机器人移动控制;③运行前方有障碍时,进行越障控制;④各个吸附机构和轮式移动机构轮流越过障碍;其优越性:本发明提供的可越障吸附式爬壁机器人能够实现在光滑竖直面的移动和越障,与已有的技术相比,既能保证移动速度又具备了越障能力,具有广阔的应用前景和重大的生产实践意义。

磁吸附力可调的爬壁机器人用轮式越障机构.pdf
一种机器人技术领域的磁吸附力可调的爬壁机器人用轮式越障机构,包括:移动机构、吸附机构、升降机构、直线导轨、弹簧、滑动导杆和导杆连接框,吸附机构置于驱动机构下并与四根滑动导杆活动连接,弹簧套接滑动导杆上,导杆连接框与弹簧相接触并与四根滑动导杆相连,升降机构与移动机构和吸附机构活动连接,直线导轨与移动机构相连,升降机构的驱动移动机构和吸附机构沿着直线导轨上下移动。本发明的非接触磁吸附轮式移动机构具有运动灵活、吸附力大且可调节、可升降的特点,具有很好的应用前景。
越障式气动爬壁机器人.pdf
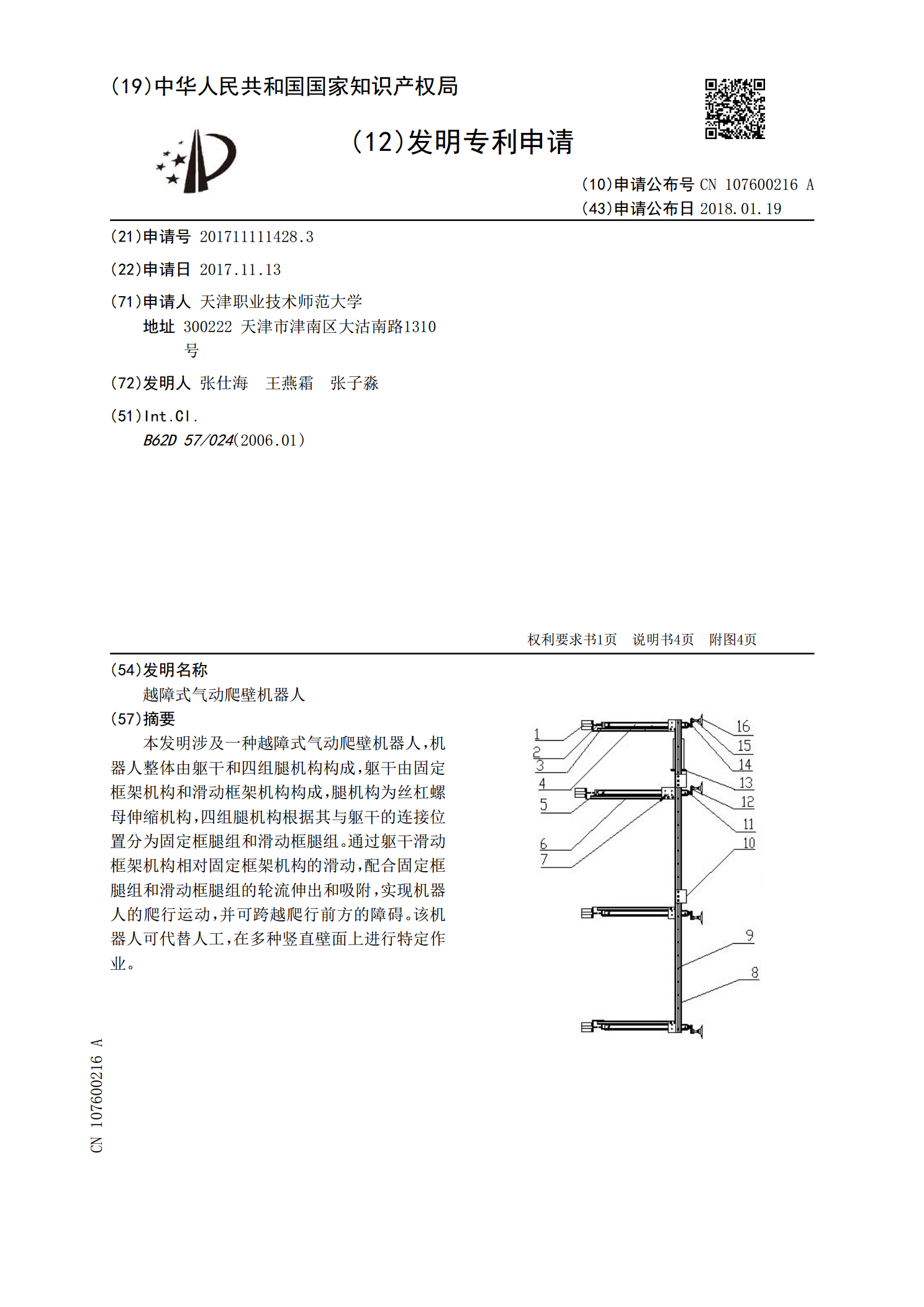
本发明涉及一种越障式气动爬壁机器人,机器人整体由躯干和四组腿机构构成,躯干由固定框架机构和滑动框架机构构成,腿机构为丝杠螺母伸缩机构,四组腿机构根据其与躯干的连接位置分为固定框腿组和滑动框腿组。通过躯干滑动框架机构相对固定框架机构的滑动,配合固定框腿组和滑动框腿组的轮流伸出和吸附,实现机器人的爬行运动,并可跨越爬行前方的障碍。该机器人可代替人工,在多种竖直壁面上进行特定作业。