
用于主动悬架的车辆侧倾运动安全线性二次型最优LQG控制器设计方法.pdf

努力****绮亦

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于主动悬架的车辆侧倾运动安全线性二次型最优LQG控制器设计方法.pdf
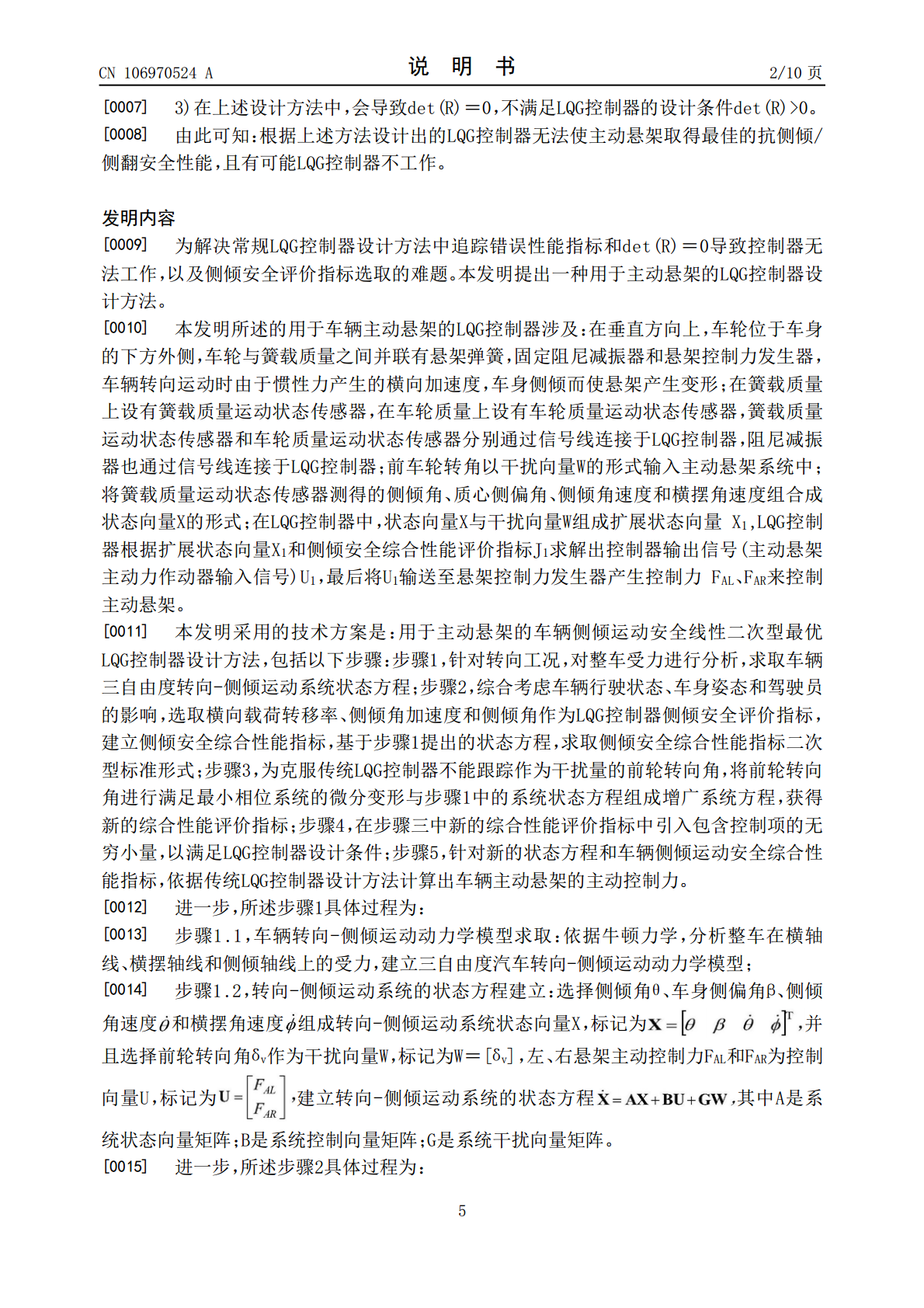
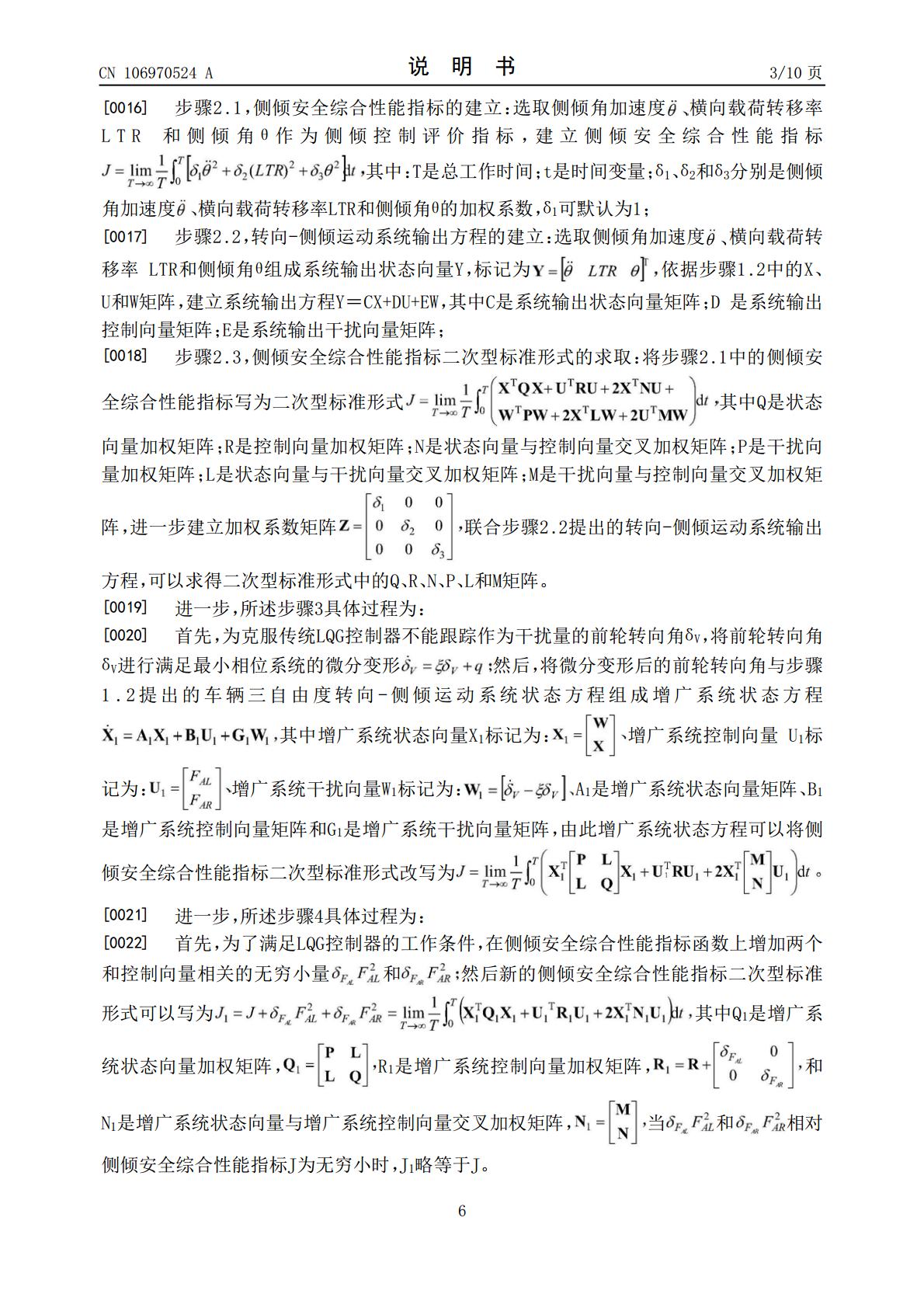
本发明公开了一种用于主动悬架的车辆侧倾运动安全线性二次型最优LQG控制器设计方法,基于车辆三自由度转向‑侧倾运动模型的状态方程,选取横向载荷转移率、侧倾角加速度和侧倾角构建车辆侧倾运动安全综合性能指标;为克服传统LQG控制器不能跟踪作为干扰量的前轮转向角,将前轮转向角进行满足最小相位系统的微分变形与原系统状态方程组成增广系统方程,并以新的状态变量改写车辆侧倾运动安全综合性能指标;在新的综合性能评价指标中引入包含控制项的无穷小量,以满足LQG控制器设计条件;最后,针对新的状态方程和车辆侧倾运动安全综合性能指

汽车侧倾运动安全主动悬架LQG控制器设计方法.docx
汽车侧倾运动安全主动悬架LQG控制器设计方法汽车侧倾是指车辆在转弯或变道时的倾斜现象,因此对于汽车侧倾的控制一直是汽车安全性和舒适性的重要问题。在过去的几十年中,许多控制方法被用于汽车侧倾的控制,其中包括主动悬架系统。主动悬架系统是一种通过控制车身姿态的变化,以提高汽车操控性能和减轻行驶不适的技术。LQG(线性二次高斯)控制器是一种常用的控制方法,其主要思想是通过对系统进行状态反馈,使系统的输出与期望输出之间的差距最小化。本文将介绍汽车侧倾运动安全主动悬架LQG控制器的设计方法。主动悬架系统是一种能够实时

基于LMI方法的车辆侧倾运动安全主动悬架H_2控制器设计.docx
基于LMI方法的车辆侧倾运动安全主动悬架H_2控制器设计基于LMI方法的车辆侧倾运动安全主动悬架H_2控制器设计摘要:车辆侧倾是车辆运动中的一个重要问题,可以影响车辆的稳定性和安全性。为了解决车辆侧倾问题,本文利用LMI方法设计了一种车辆侧倾运动安全主动悬架H_2控制器。通过建立车辆侧倾模型以及H_2控制器设计方法,实现了车辆侧倾运动的稳定性。关键词:车辆侧倾、主动悬架、H_2控制器、LMI方法1、引言车辆侧倾是指车辆在转弯或行驶过程中由于横向加速度产生的侧向倾斜。车辆侧倾会导致车辆的稳定性降低,甚至发生
用于车辆的防侧倾车轮悬架系统、用于通过防侧倾车轮悬架系统防止车辆侧倾的方法.pdf
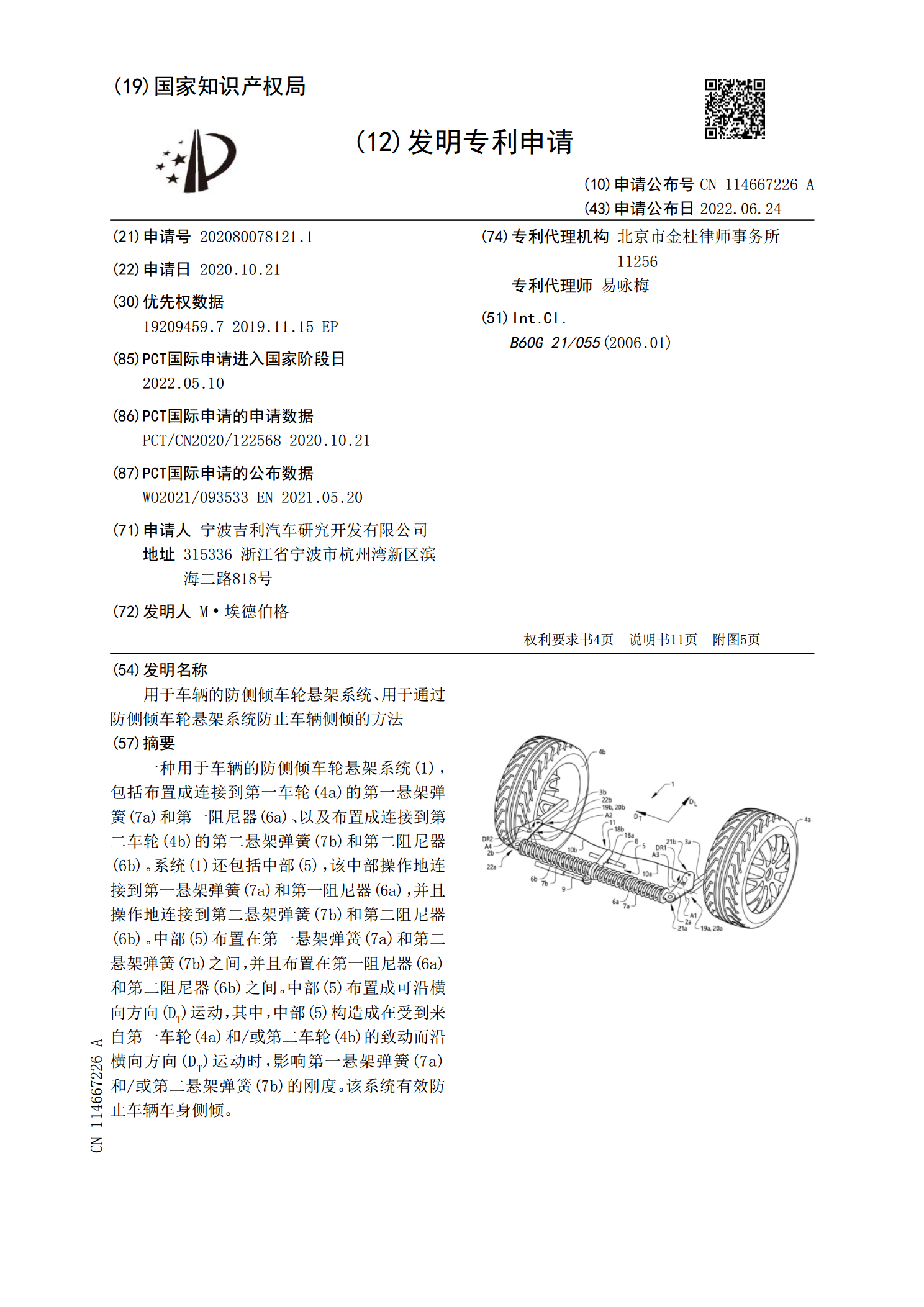
一种用于车辆的防侧倾车轮悬架系统(1),包括布置成连接到第一车轮(4a)的第一悬架弹簧(7a)和第一阻尼器(6a)、以及布置成连接到第二车轮(4b)的第二悬架弹簧(7b)和第二阻尼器(6b)。系统(1)还包括中部(5),该中部操作地连接到第一悬架弹簧(7a)和第一阻尼器(6a),并且操作地连接到第二悬架弹簧(7b)和第二阻尼器(6b)。中部(5)布置在第一悬架弹簧(7a)和第二悬架弹簧(7b)之间,并且布置在第一阻尼器(6a)和第二阻尼器(6b)之间。中部(5)布置成可沿横向方向(D<base:Sub>T

汽车主动悬架LQG控制器最优控制力的设计方法.pdf
本发明涉及汽车主动悬架LQG控制器最优控制力的设计方法,属于主动悬架技术领域。本发明根据1/4车辆行驶振动模型,利用MATLAB/Simulink,构建了平顺性加权系数优化设计Simulink仿真模型,并以路面不平度位移为输入激励,以轮胎动位移和悬架动挠度为约束条件,以车身垂向振动加速度均方根值最小为设计目标,优化设计得到平顺性加权系数及LQG最优控制力。通过实例及仿真验证可知,该方法可得到准确可靠的主动悬架LQG最优控制力,为主动悬架系统设计及控制提供了可靠的最优控制力设计方法。该方法不仅可提高主动悬架