
自动除草机器人及其控制方法.pdf

St****36


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动除草机器人及其控制方法.pdf
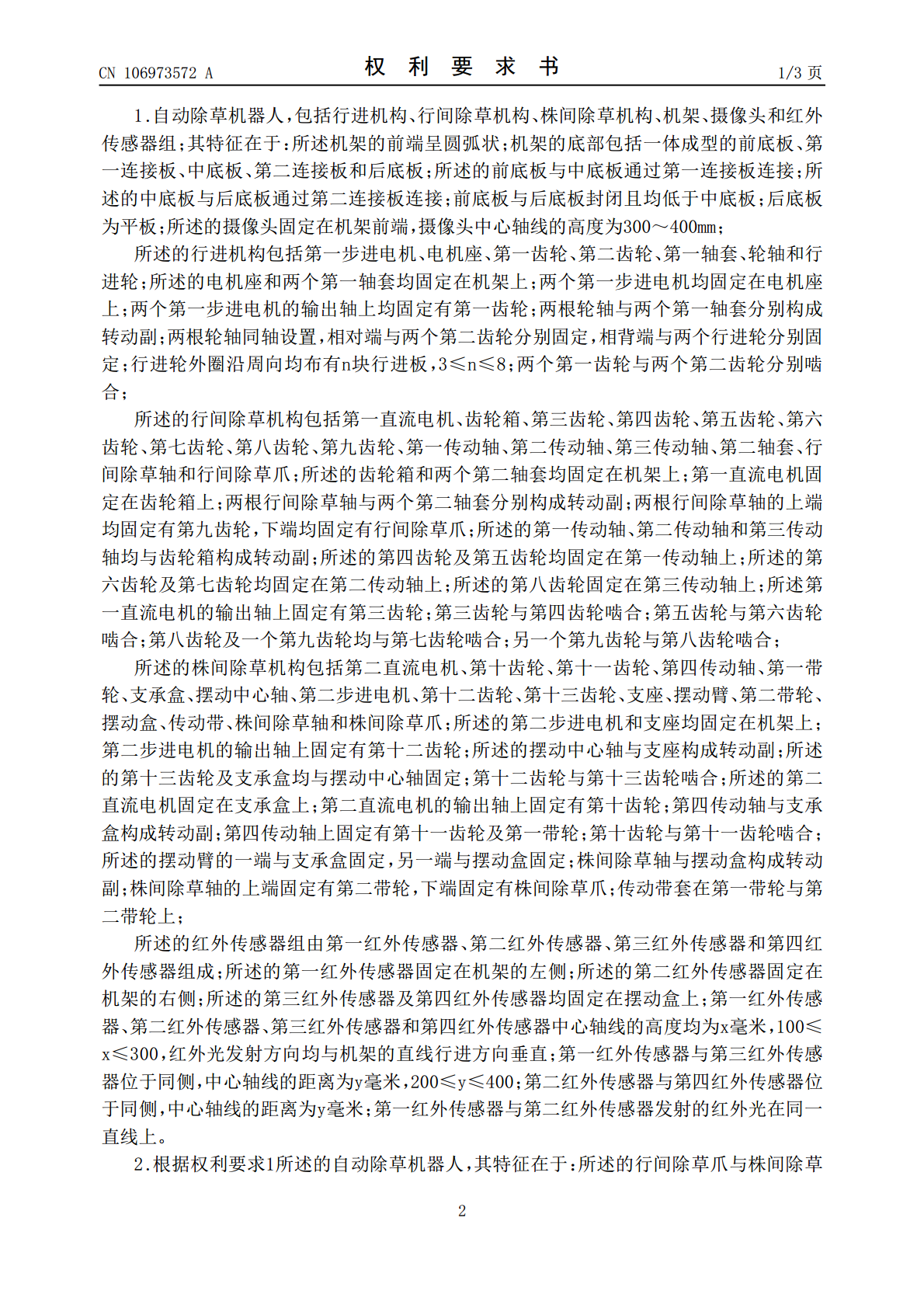
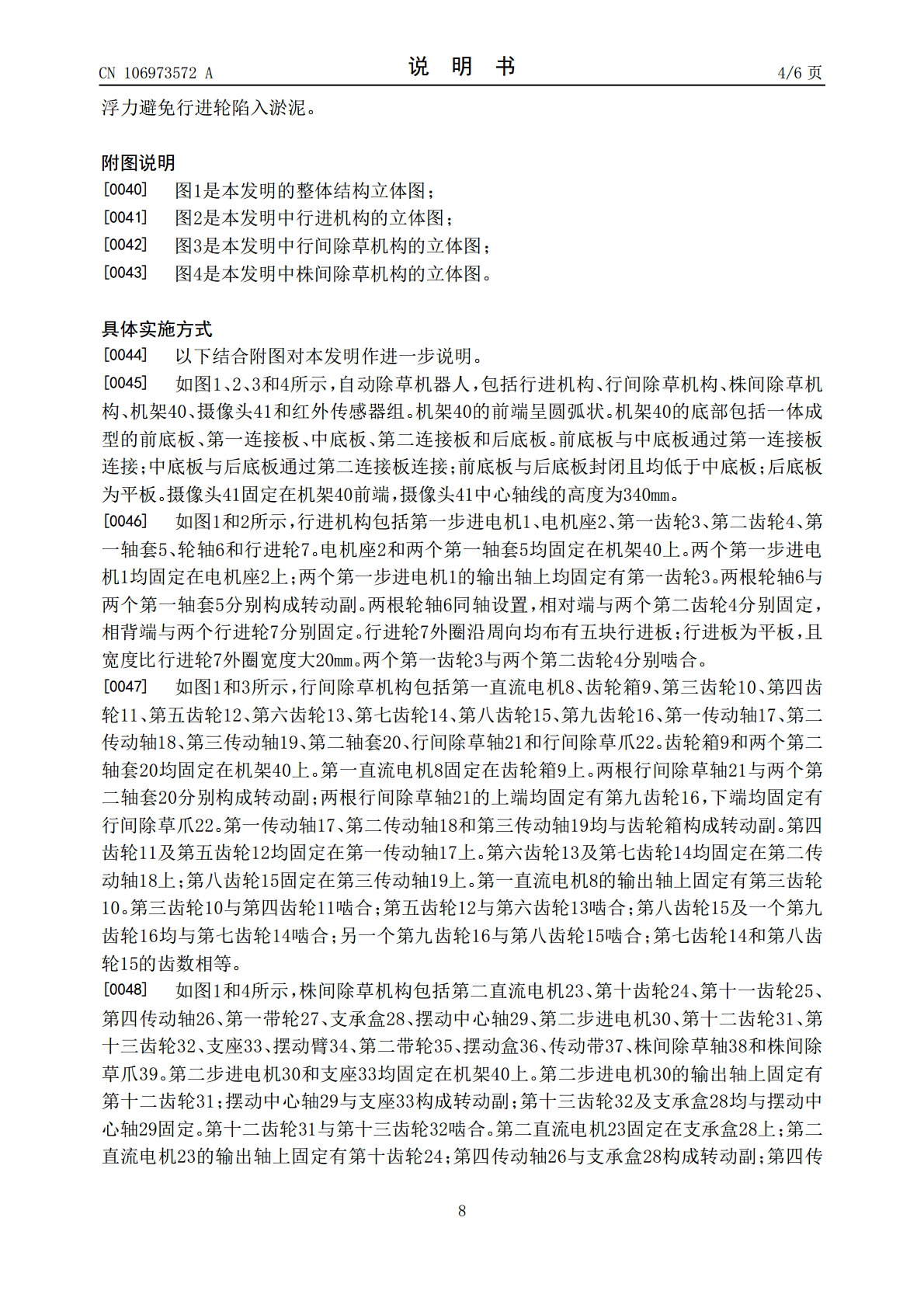
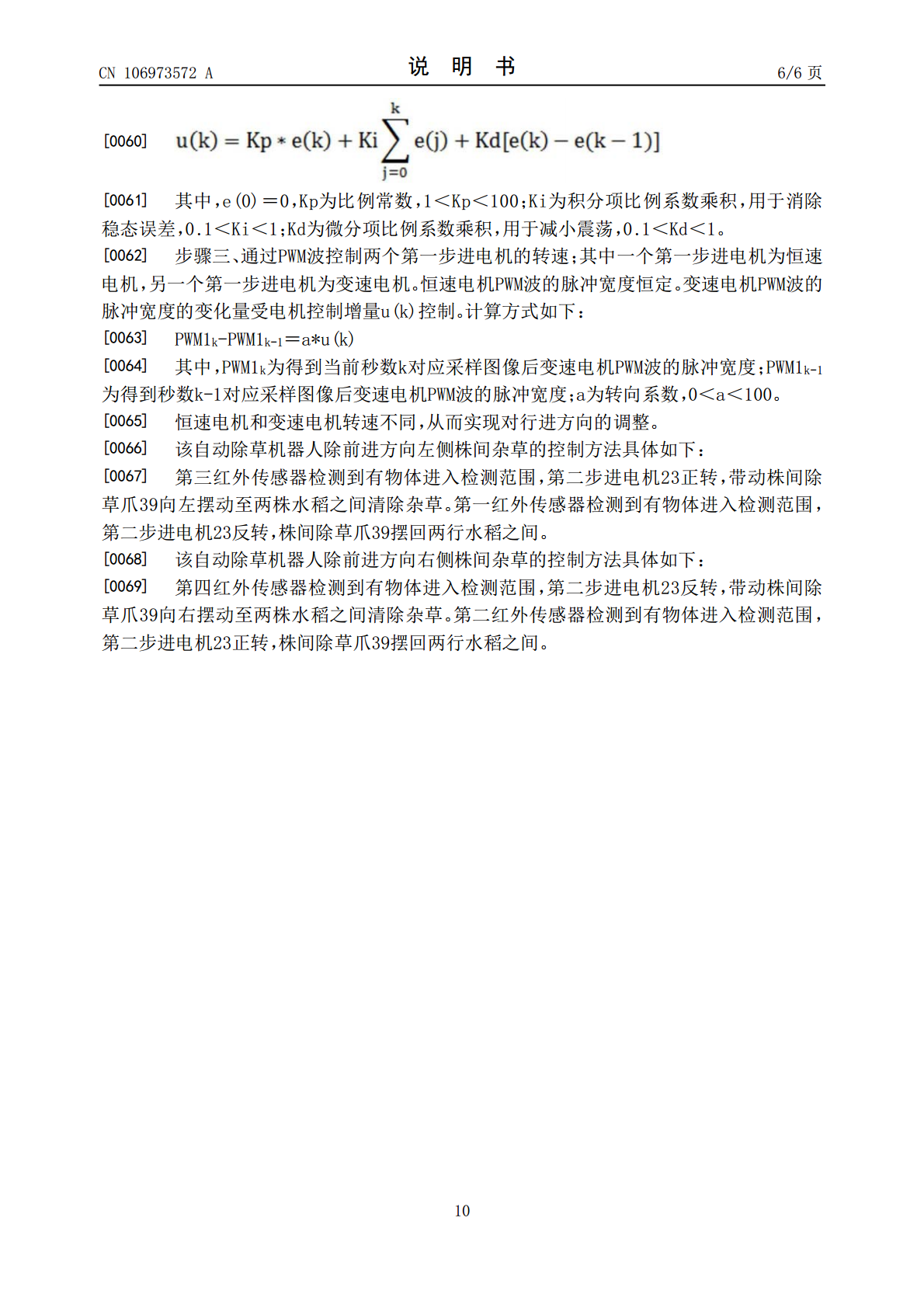
本发明公开了自动除草机器人及其控制方法。水田除草具有促进水稻生长和节省肥料的效果,现有的水田除草装置不能清除株间的杂草。本发明包括行进机构、行间除草机构、株间除草机构、机架和摄像头。行进机构包括第一步进电机、电机座、第一轴套、轮轴和行进轮。行间除草机构包括第一直流电机、齿轮箱、第一传动轴、第二传动轴、第三传动轴、第二轴套、行间除草轴和行间除草爪。株间除草机构包括第二直流电机、第四传动轴、第一带轮、支承盒、摆动中心轴、第二步进电机、支座、摆动臂、第二带轮、摆动盒、传动带、株间除草轴和株间除草爪。本发明工作过

一种直线滑台式除草机器人及其控制方法.pdf
本发明提供一种直线滑台式除草机器人及其控制方法,涉及智能农机技术领域,包括:智能控制器、直线滑台、传动轴旋转机构、装置搭载平台、太阳能储能供能系统、传动轴升降控制机构、传动轴、执行器搭载平台、除草执行器、编码电机、麦克纳姆轮、平台升降支架、摄像头组;解决了现有大部分的除草机机器人仅仅能拔除杂草,在自由度、效率、株间除草等方面受限的技术问题。

一种自动炒菜机器人及其控制方法.pdf
本发明涉及炒菜机器领域,公开了一种自动炒菜机器人及其控制方法,包括机身,所述机身的表面固定安装有电磁炉,电磁炉上活动设置有锅体,机身的表面贯穿设置有用于放置食材的送菜机构、将送菜机构的食材转运给锅体的倒菜机构以及与锅体位置对应的翻盖机构,翻盖机构包括悬臂、与悬臂可拆卸连接的锅盖以及与悬臂固定连接且延伸至锅盖内的油水出口,悬臂与锅盖共同固定连接有炒菜机构,炒菜机构包括主锥齿轮、与主锥齿轮传动连接的从锥齿轮与从锥齿轮同轴传动的翻炒头。本发明通过送菜机构、倒菜机构、翻盖机构和电磁炉等之间的配合,可以实现升温更高

环形振子自动焊锡机器人及其控制方法.pdf
本发明公开一种环形振子自动焊锡机器人及其控制方法,其中所述环形振子自动焊锡机器人,其特征在于,包括:机架,所述机架上设有工作台;传动装置,设置在所述工作台上,用于传输待加工工件;焊锡装置,包括焊锡组件和驱动所述焊锡组件移动的驱动组件,所述焊锡组件设置在所述驱动组件上,所述驱动组件设于所述工作台上;工件固定装置,包括设于所述工作台上的支撑架和设于所述支撑架上的旋转支架,所述旋转支架用于旋转待加工工件;机械手,设置在所述工作台上,用于从所述传动装置抓取待加工工件至所述旋转支架上。本发明技术方案实现全自动上下料
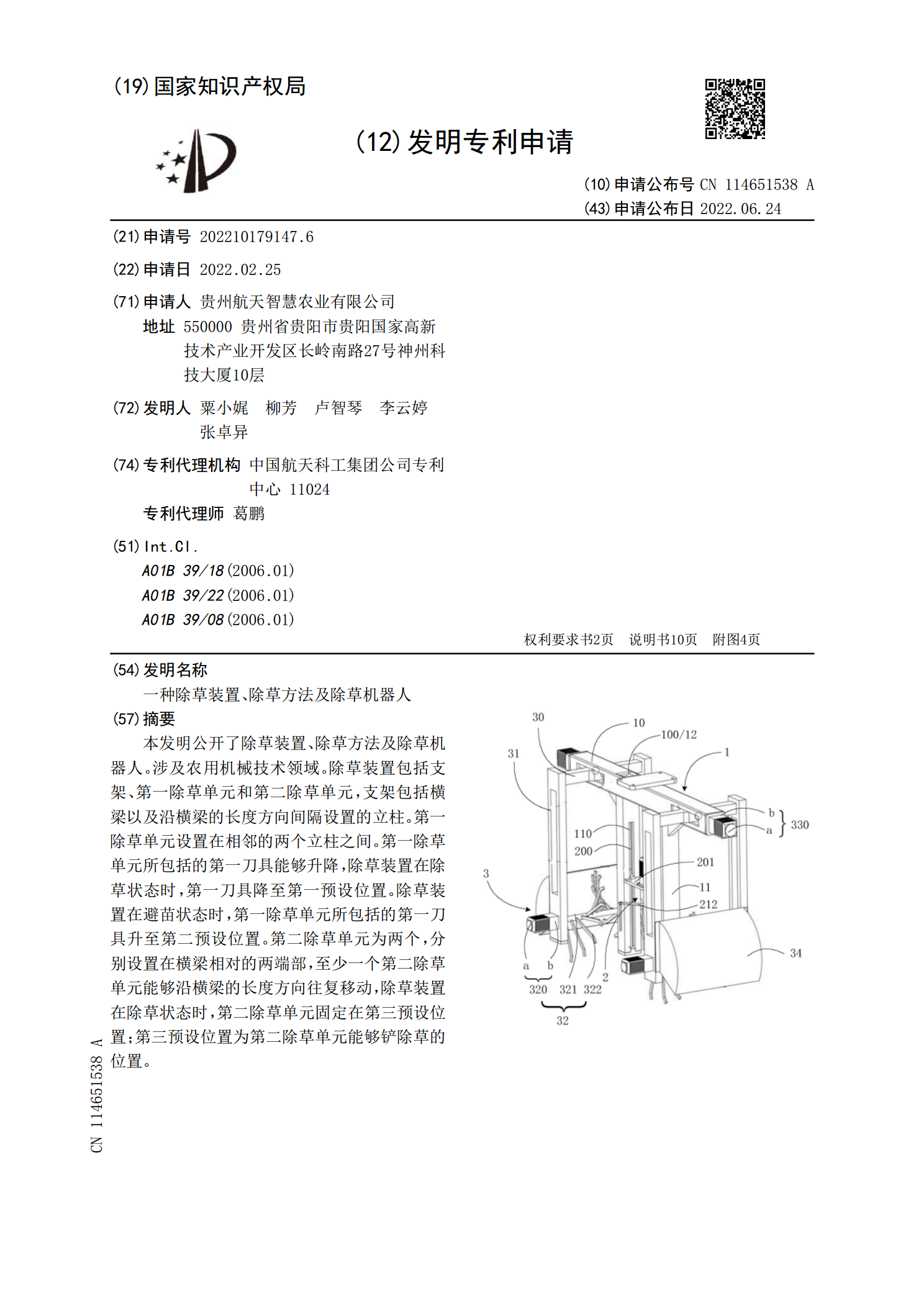
一种除草装置、除草方法及除草机器人.pdf
本发明公开了除草装置、除草方法及除草机器人。涉及农用机械技术领域。除草装置包括支架、第一除草单元和第二除草单元,支架包括横梁以及沿横梁的长度方向间隔设置的立柱。第一除草单元设置在相邻的两个立柱之间。第一除草单元所包括的第一刀具能够升降,除草装置在除草状态时,第一刀具降至第一预设位置。除草装置在避苗状态时,第一除草单元所包括的第一刀具升至第二预设位置。第二除草单元为两个,分别设置在横梁相对的两端部,至少一个第二除草单元能够沿横梁的长度方向往复移动,除草装置在除草状态时,第二除草单元固定在第三预设位置;第三预