
环形振子自动焊锡机器人及其控制方法.pdf

努力****元恺


1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

环形振子自动焊锡机器人及其控制方法.pdf
本发明公开一种环形振子自动焊锡机器人及其控制方法,其中所述环形振子自动焊锡机器人,其特征在于,包括:机架,所述机架上设有工作台;传动装置,设置在所述工作台上,用于传输待加工工件;焊锡装置,包括焊锡组件和驱动所述焊锡组件移动的驱动组件,所述焊锡组件设置在所述驱动组件上,所述驱动组件设于所述工作台上;工件固定装置,包括设于所述工作台上的支撑架和设于所述支撑架上的旋转支架,所述旋转支架用于旋转待加工工件;机械手,设置在所述工作台上,用于从所述传动装置抓取待加工工件至所述旋转支架上。本发明技术方案实现全自动上下料
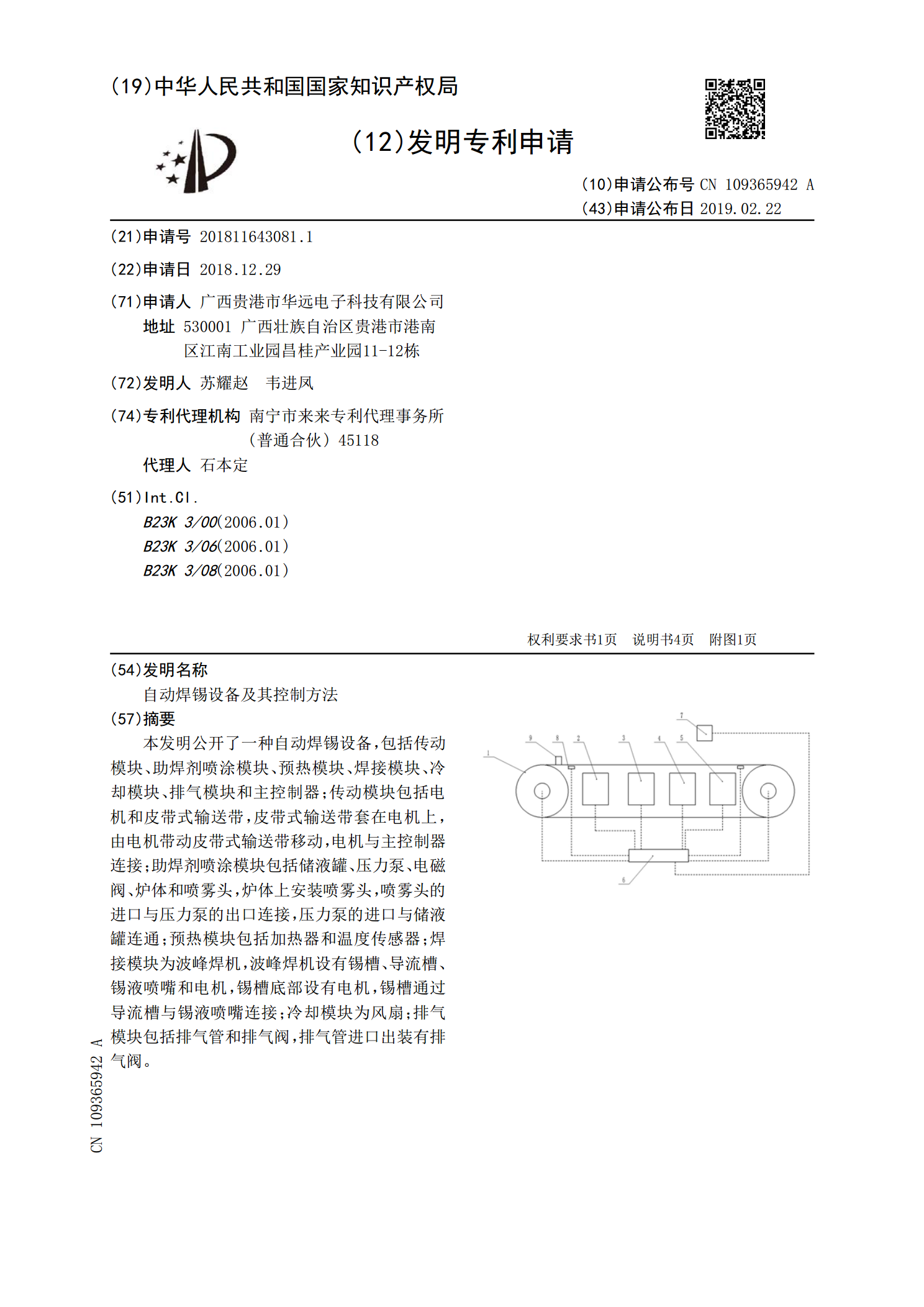
自动焊锡设备及其控制方法.pdf
本发明公开了一种自动焊锡设备,包括传动模块、助焊剂喷涂模块、预热模块、焊接模块、冷却模块、排气模块和主控制器;传动模块包括电机和皮带式输送带,皮带式输送带套在电机上,由电机带动皮带式输送带移动,电机与主控制器连接;助焊剂喷涂模块包括储液罐、压力泵、电磁阀、炉体和喷雾头,炉体上安装喷雾头,喷雾头的进口与压力泵的出口连接,压力泵的进口与储液罐连通;预热模块包括加热器和温度传感器;焊接模块为波峰焊机,波峰焊机设有锡槽、导流槽、锡液喷嘴和电机,锡槽底部设有电机,锡槽通过导流槽与锡液喷嘴连接;冷却模块为风扇;排气模
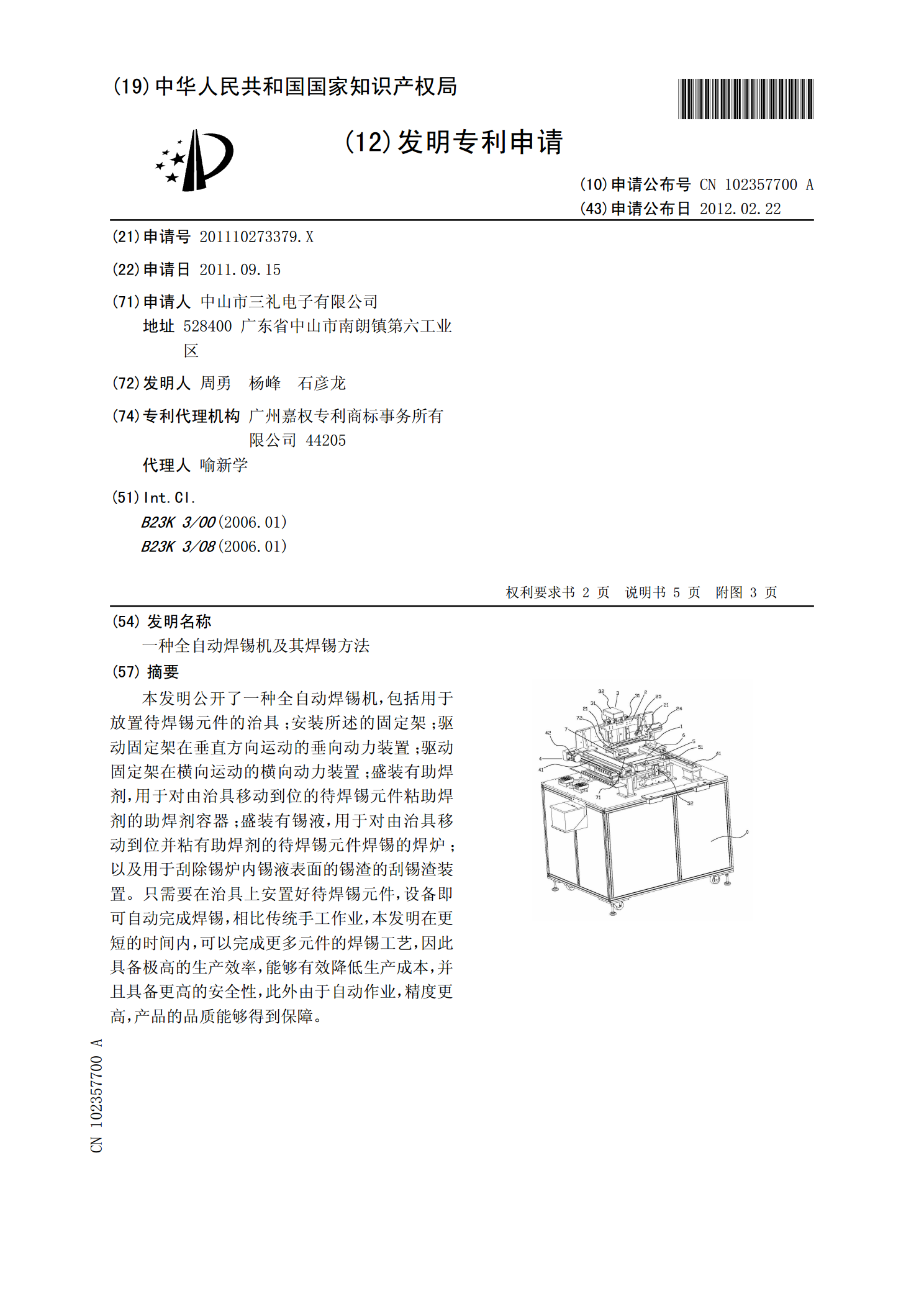
一种全自动焊锡机及其焊锡方法.pdf
本发明公开了一种全自动焊锡机,包括用于放置待焊锡元件的治具;安装所述的固定架;驱动固定架在垂直方向运动的垂向动力装置;驱动固定架在横向运动的横向动力装置;盛装有助焊剂,用于对由治具移动到位的待焊锡元件粘助焊剂的助焊剂容器;盛装有锡液,用于对由治具移动到位并粘有助焊剂的待焊锡元件焊锡的焊炉;以及用于刮除锡炉内锡液表面的锡渣的刮锡渣装置。只需要在治具上安置好待焊锡元件,设备即可自动完成焊锡,相比传统手工作业,本发明在更短的时间内,可以完成更多元件的焊锡工艺,因此具备极高的生产效率,能够有效降低生产成本,并且具

焊锡机器人自动焊锡机优秀PPT.ppt
全面提高焊接质量全自动焊锡机器人焊锡机器人起源于,进入国内后最早应用于电声及汽车电子等产品上。05年前市面上只有日本几家品牌的焊锡机器人可选。06年国产焊锡机器人面试,其后国内多家自动化厂家纷纷投入到此行业。目前形成了以国产品牌为代表的国产焊锡机器人与几家品牌焊锡机器人并存的市场局面。焊锡机器人与选择性波峰焊针对手工焊接工位的替代,目前市面上可选的自动设备包括选择性波峰焊和焊锡机器人。选择性波峰焊为波峰焊的一种特殊机型,主要针对通孔元件,选择性的设置焊接点,来满足生产需求。选择性波峰焊的特点决定了其设备要

自动除草机器人及其控制方法.pdf
本发明公开了自动除草机器人及其控制方法。水田除草具有促进水稻生长和节省肥料的效果,现有的水田除草装置不能清除株间的杂草。本发明包括行进机构、行间除草机构、株间除草机构、机架和摄像头。行进机构包括第一步进电机、电机座、第一轴套、轮轴和行进轮。行间除草机构包括第一直流电机、齿轮箱、第一传动轴、第二传动轴、第三传动轴、第二轴套、行间除草轴和行间除草爪。株间除草机构包括第二直流电机、第四传动轴、第一带轮、支承盒、摆动中心轴、第二步进电机、支座、摆动臂、第二带轮、摆动盒、传动带、株间除草轴和株间除草爪。本发明工作过