
用于移动机器人的四轮式行走机构.pdf

一只****签网


1/8
2/8

3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于移动机器人的四轮式行走机构.pdf
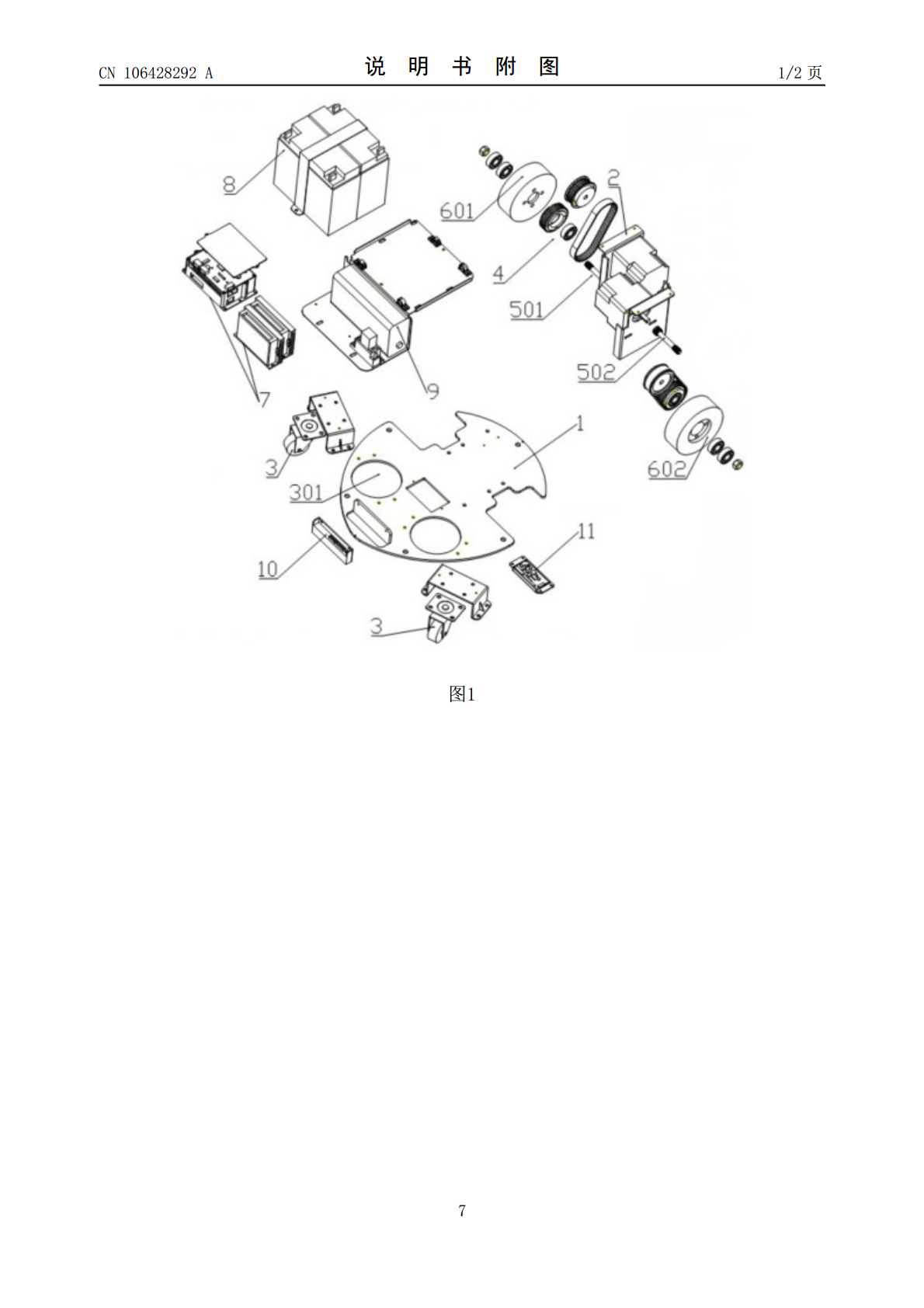
本发明公开一种用于移动机器人的四轮式行走机构,包括,电机及驱动轮;还包括,圆弧齿同步轮带装置;所述驱动轮通过圆弧齿同步轮带装置安装于所述电机驱动轴上。本发明所带来的有益效果:本发明具有换向速度快、缓冲间隙小、传动距离精准、损耗低、无噪声和振动危害、启动性能好、节能和经济的优点,并且结构相对简单,安装方便,功能强大,尤其能降低成本。

一种轮式行走机构.pdf
本发明涉及一种行走机构,具体涉及一种对复杂地形具有较强适应能力的轮式行走机构;包括底盘,电机,运动分配器,减速器和4个功能结构相同的行走模块;电机设置在底盘上,与运动分配器相连,提供驱动力,4个行走模块对称设置在底盘的两侧,运动分配器通过减速器与其中2个对称设置的行走模块连接;位于底盘同侧的2个行走模块通过摇臂结构连接;每个行走模块采用行星轮系实现欠驱动车轮结构;单侧悬架有两个副摇臂和一个主摇臂,这种主副摇臂相结合的方式保证了车体在遇到障碍物冲击时减小俯仰程度,确保移动机器人在行进过程中8个车轮均能够着地
一种用于搭载无人机的四驱轮式移动机器人结构.pdf
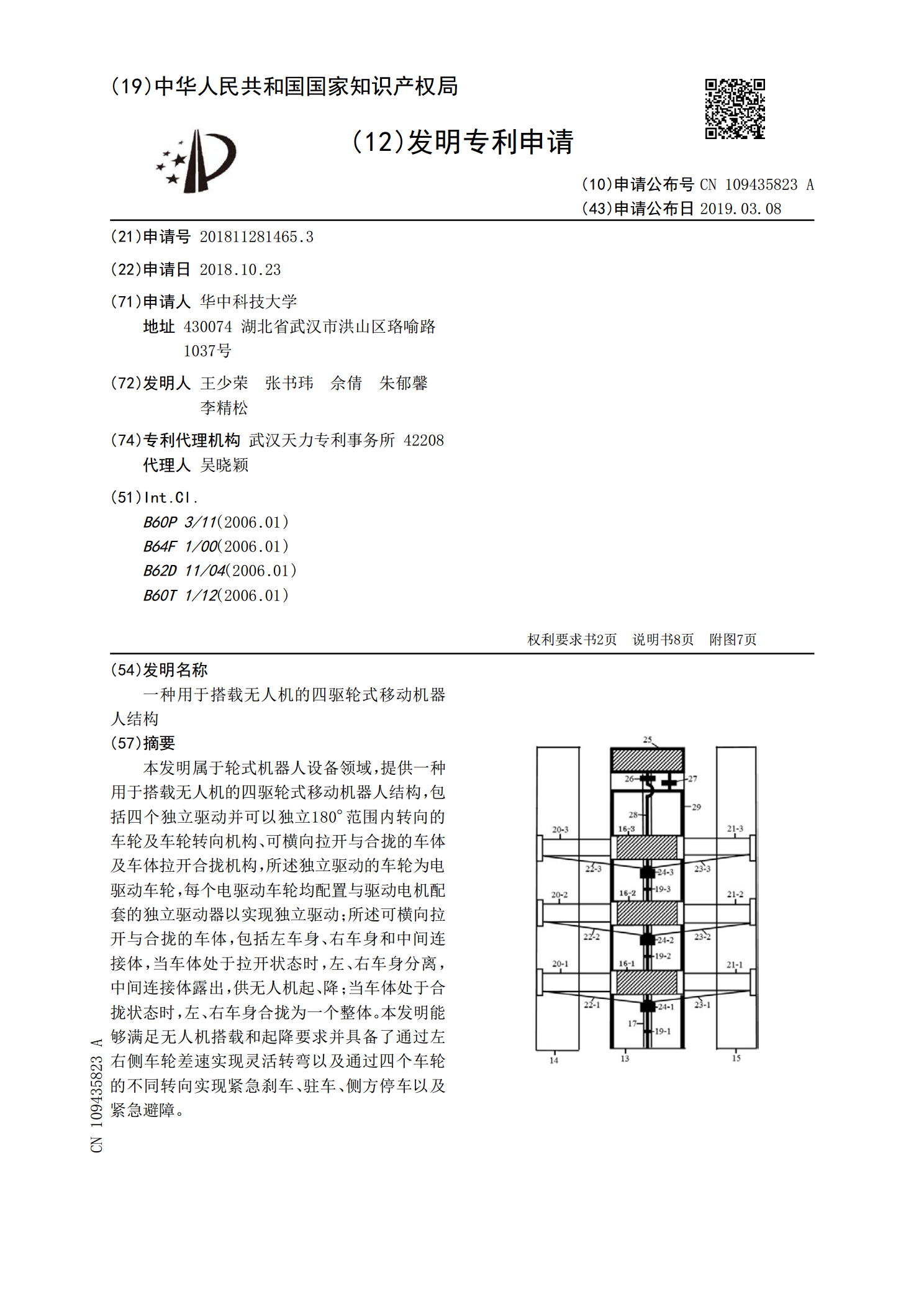
本发明属于轮式机器人设备领域,提供一种用于搭载无人机的四驱轮式移动机器人结构,包括四个独立驱动并可以独立180°范围内转向的车轮及车轮转向机构、可横向拉开与合拢的车体及车体拉开合拢机构,所述独立驱动的车轮为电驱动车轮,每个电驱动车轮均配置与驱动电机配套的独立驱动器以实现独立驱动;所述可横向拉开与合拢的车体,包括左车身、右车身和中间连接体,当车体处于拉开状态时,左、右车身分离,中间连接体露出,供无人机起、降;当车体处于合拢状态时,左、右车身合拢为一个整体。本发明能够满足无人机搭载和起降要求并具备了通过左右侧

移动机器人行走机构.pptx
通过轮式或者履带式进行移动的机器人的内部结构比较简单,在运动方面消耗的能力也并不是很多,然后,很大程度上难以逾越较高难度的障碍物,伴随着现阶段科技的不断发展,机器人技术的不断进步,现阶段的机器人越来越趋向于小型化。因此,地形对机器人运动的限制因素进一步提升,而且爬行或者步行机器人逾越障碍物能力比较强的机器人,内部的结构也相对比较复杂,内部的关节、驱动零件以及自由度结构比较对,按严重阻碍了实际应用性能。对于跳跃式机器人可以跳跃自己几倍自己身高高度的障碍物,因此,有很强的适应地形的能力。然后,跳跃运动需要客服

移动机器人行走机构.pptx
通过轮式或者履带式进行移动的机器人的内部结构比较简单,在运动方面消耗的能力也并不是很多,然后,很大程度上难以逾越较高难度的障碍物,伴随着现阶段科技的不断发展,机器人技术的不断进步,现阶段的机器人越来越趋向于小型化。因此,地形对机器人运动的限制因素进一步提升,而且爬行或者步行机器人逾越障碍物能力比较强的机器人,内部的结构也相对比较复杂,内部的关节、驱动零件以及自由度结构比较对,按严重阻碍了实际应用性能。对于跳跃式机器人可以跳跃自己几倍自己身高高度的障碍物,因此,有很强的适应地形的能力。然后,跳跃运动需要客服