
攀爬机器人.pdf

小凌****甜蜜

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
攀爬机器人.pdf
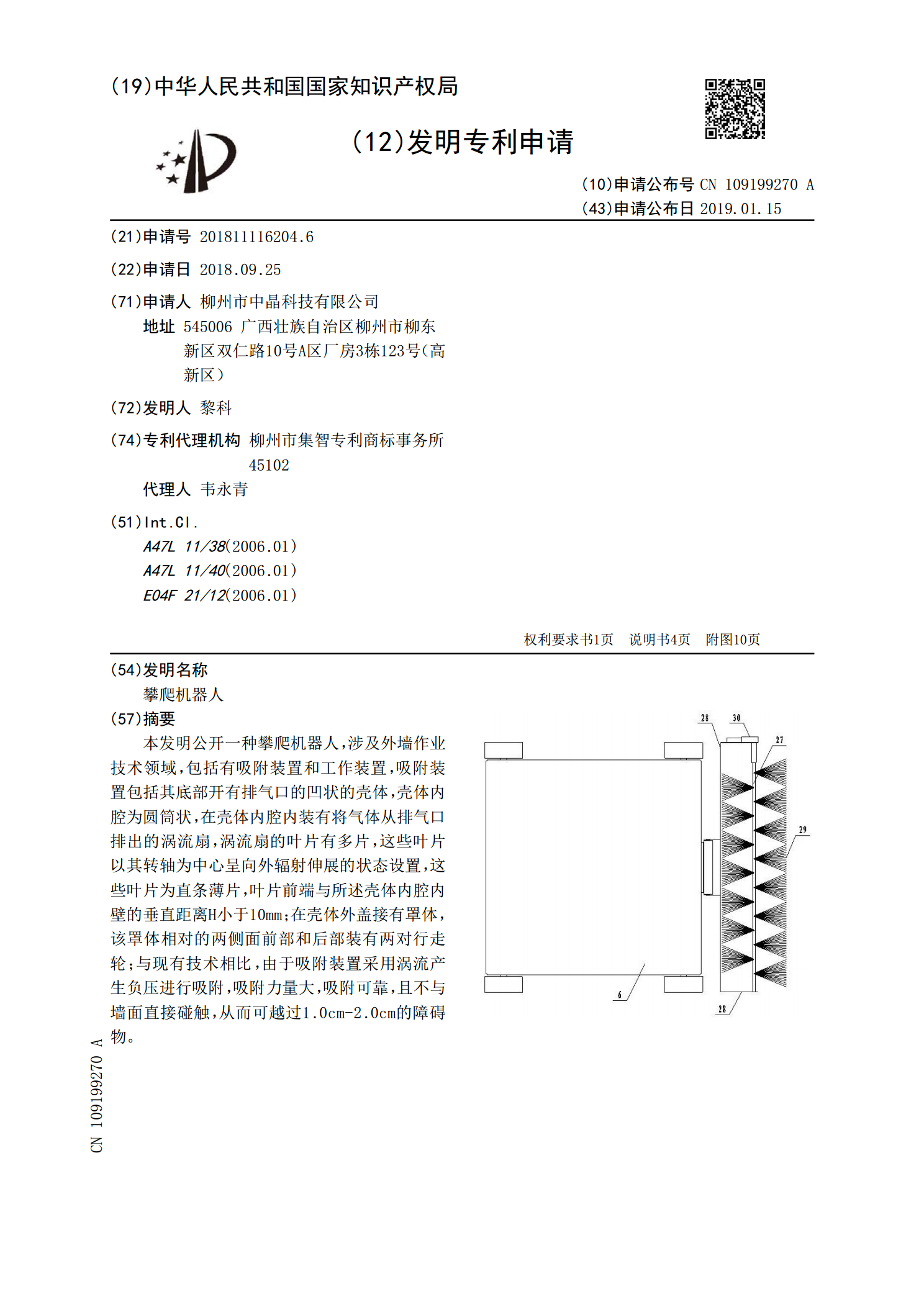
本发明公开一种攀爬机器人,涉及外墙作业技术领域,包括有吸附装置和工作装置,吸附装置包括其底部开有排气口的凹状的壳体,壳体内腔为圆筒状,在壳体内腔内装有将气体从排气口排出的涡流扇,涡流扇的叶片有多片,这些叶片以其转轴为中心呈向外辐射伸展的状态设置,这些叶片为直条薄片,叶片前端与所述壳体内腔内壁的垂直距离H小于10mm;在壳体外盖接有罩体,该罩体相对的两侧面前部和后部装有两对行走轮;与现有技术相比,由于吸附装置采用涡流产生负压进行吸附,吸附力量大,吸附可靠,且不与墙面直接碰触,从而可越过1.0cm‑2.0cm

攀爬机器人.pdf
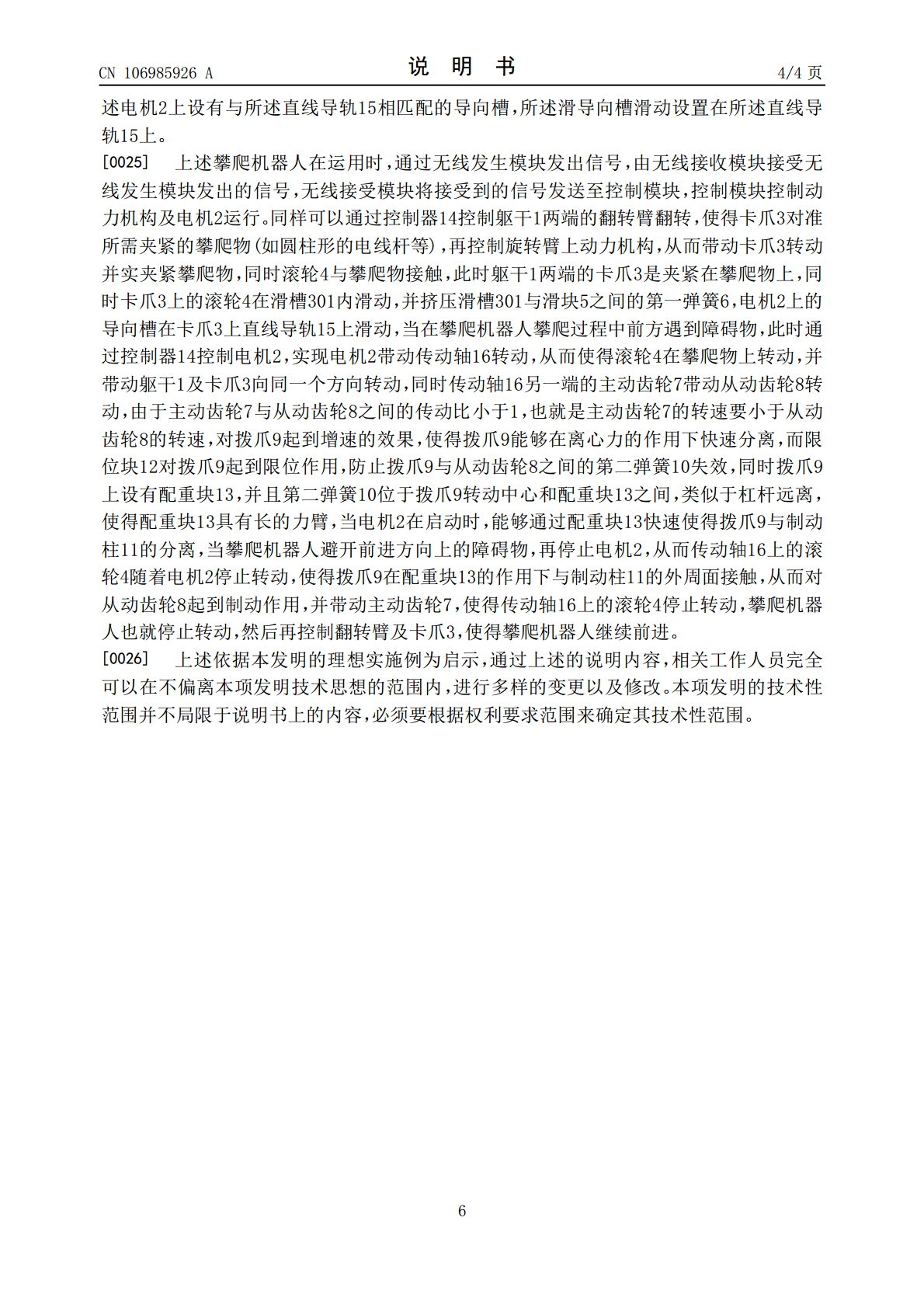
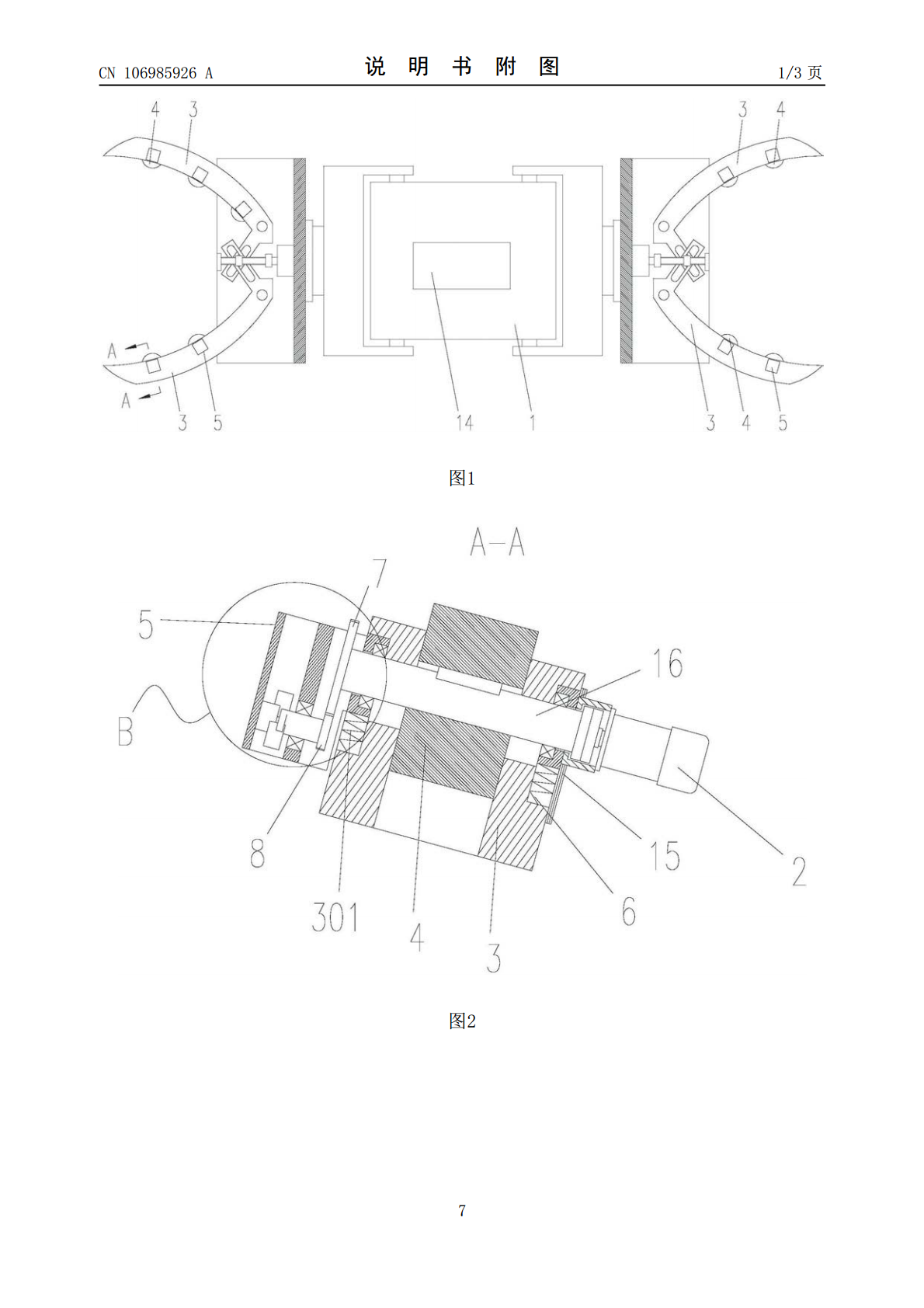
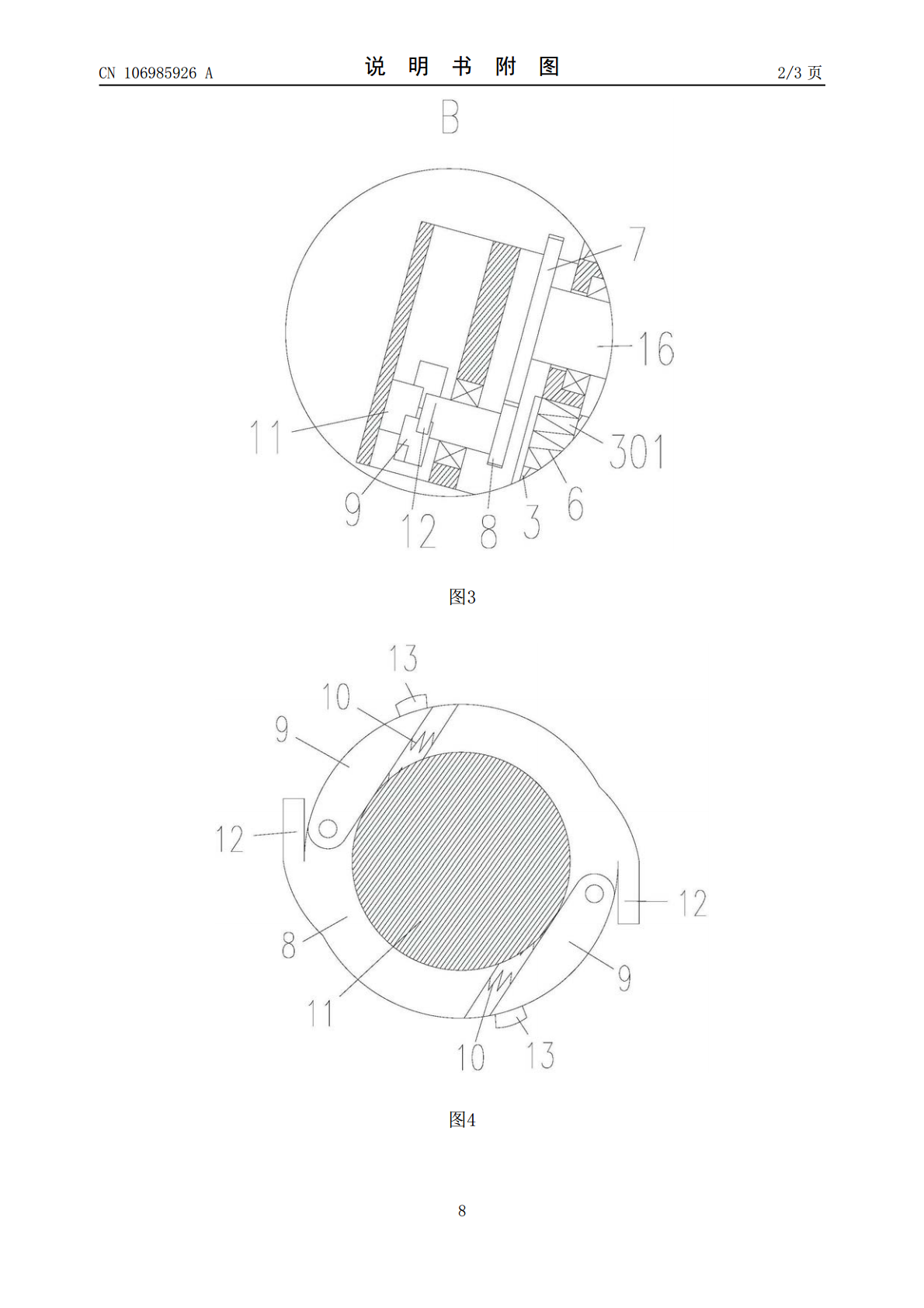
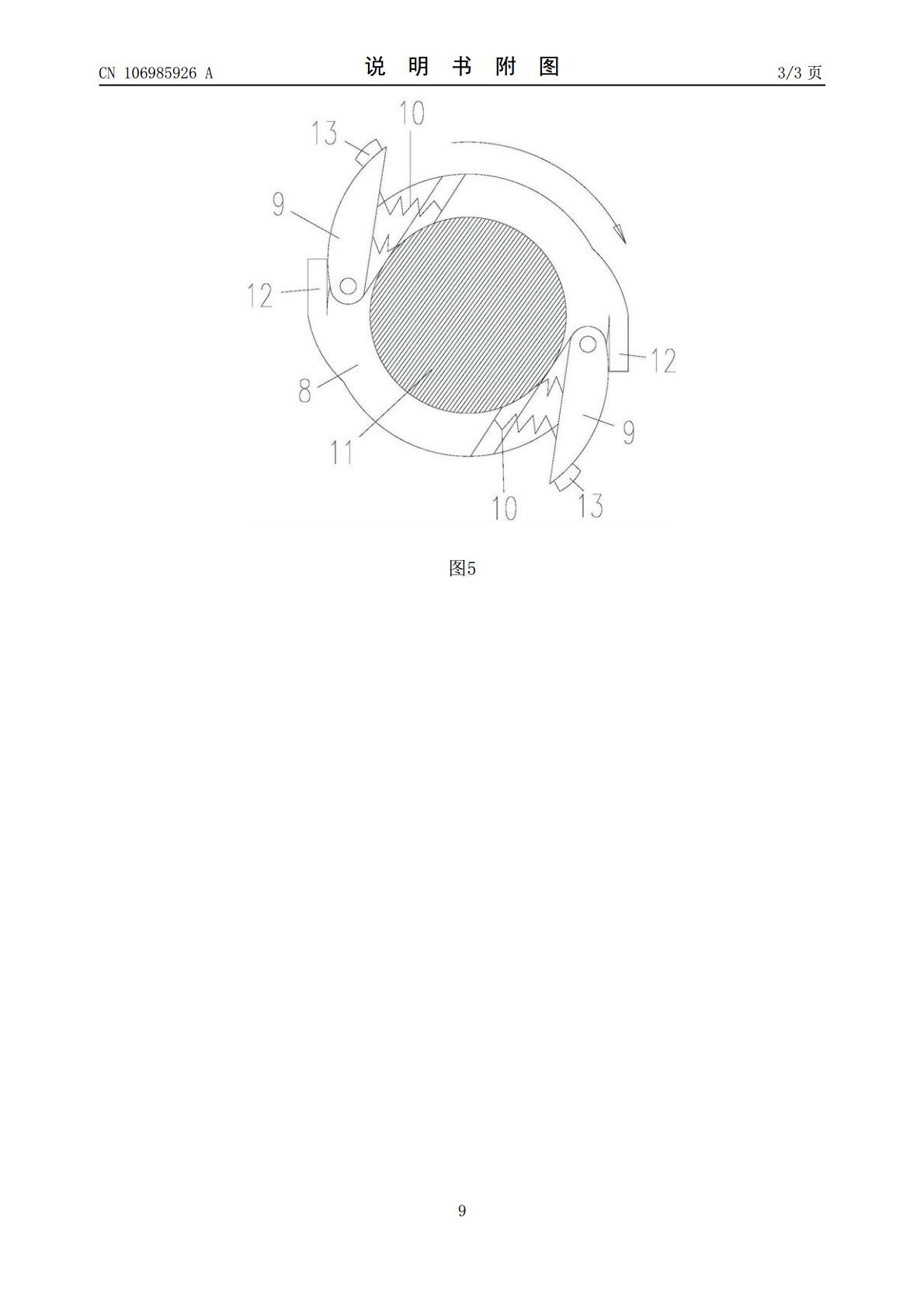
本发明涉及机器人设备技术领域,尤其是涉及一种攀爬机器人,包括躯干、传动轴、电机和控制器,所述躯干的两端均设置有卡爪组,所述卡爪组由两个相对转动设置在躯干上的卡爪组成,所述躯干上设有用于驱动两个所述卡爪相对靠近或者远离的动力机构,两个所述卡爪相对的一侧面上均设有滚轮,所述滚轮设置在所述传动轴上,所述滚轮的转动中心轴线与卡爪的转动中心轴线相互平行设置,本发明攀爬机器人在使用时,通过在卡爪上设置滚轮,并有电机带动滚轮转动,实现攀爬机器人在攀爬物上的转动,使得攀爬机器人能够避开前进方向上的障碍物,避免了当机器人在
基于攀爬机器人的攀爬方法.pdf
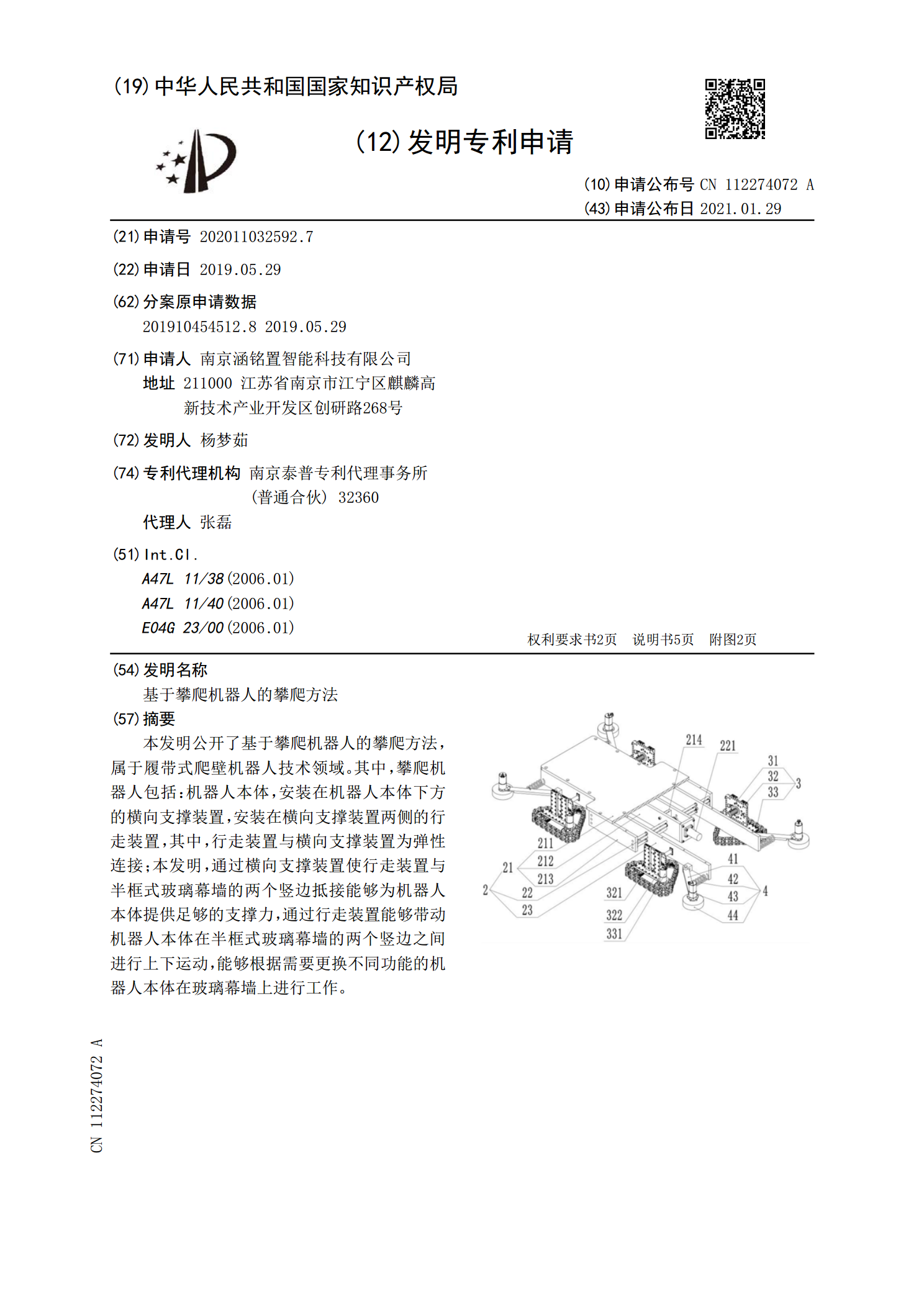
本发明公开了基于攀爬机器人的攀爬方法,属于履带式爬壁机器人技术领域。其中,攀爬机器人包括:机器人本体,安装在机器人本体下方的横向支撑装置,安装在横向支撑装置两侧的行走装置,其中,行走装置与横向支撑装置为弹性连接;本发明,通过横向支撑装置使行走装置与半框式玻璃幕墙的两个竖边抵接能够为机器人本体提供足够的支撑力,通过行走装置能够带动机器人本体在半框式玻璃幕墙的两个竖边之间进行上下运动,能够根据需要更换不同功能的机器人本体在玻璃幕墙上进行工作。
一种攀爬机器人及其攀爬方法.pdf
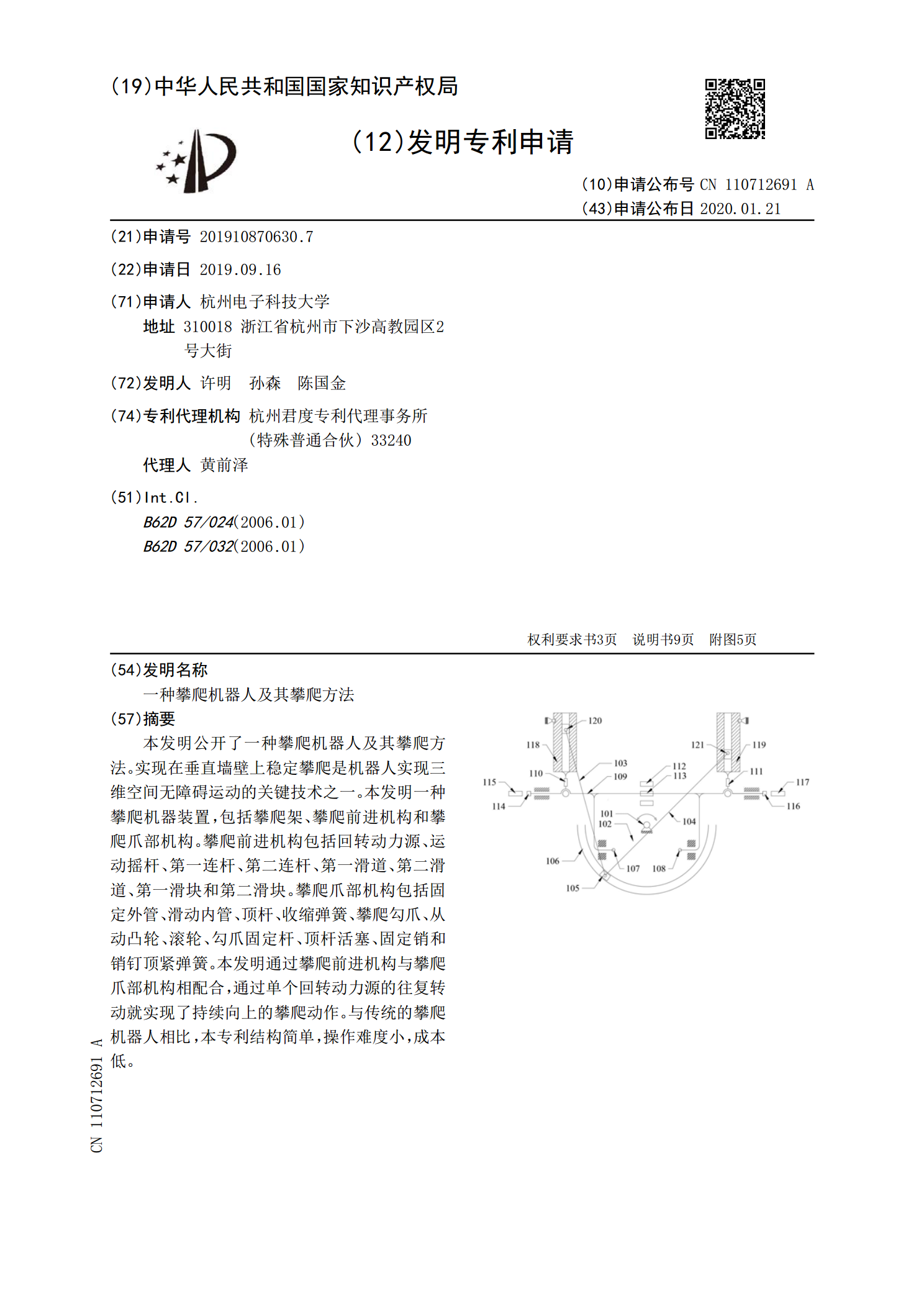
本发明公开了一种攀爬机器人及其攀爬方法。实现在垂直墙壁上稳定攀爬是机器人实现三维空间无障碍运动的关键技术之一。本发明一种攀爬机器装置,包括攀爬架、攀爬前进机构和攀爬爪部机构。攀爬前进机构包括回转动力源、运动摇杆、第一连杆、第二连杆、第一滑道、第二滑道、第一滑块和第二滑块。攀爬爪部机构包括固定外管、滑动内管、顶杆、收缩弹簧、攀爬勾爪、从动凸轮、滚轮、勾爪固定杆、顶杆活塞、固定销和销钉顶紧弹簧。本发明通过攀爬前进机构与攀爬爪部机构相配合,通过单个回转动力源的往复转动就实现了持续向上的攀爬动作。与传统的攀爬机器

一种攀爬机器人复合足端以及攀爬机器人.pdf
本发明公开了一种攀爬机器人复合足端以及攀爬机器人,属于机器人技术领域。本发明针对电塔本身具有的结构特征,对电塔上脚钉和角钢主材的合理利用,通过机械爪夹紧脚钉、电磁铁吸附角钢表面的方式来实现分别受力,使机器人能够稳定停留附着在角钢塔上,并且能够灵活抓取脚钉实现步进式攀登;本发明通过机械爪的抓取以及电磁铁的吸附能够很好地适应于角钢塔带有人工攀爬脚钉的主材部分的攀爬和停留,同时很好地让机器人维持在铁塔上进行相关巡检和检测工作。