
一种基于导磁导电材料的高压巡检机器人的磁力驱动装置及驱动方法.pdf

猫巷****熙柔

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于导磁导电材料的高压巡检机器人的磁力驱动装置及驱动方法.pdf
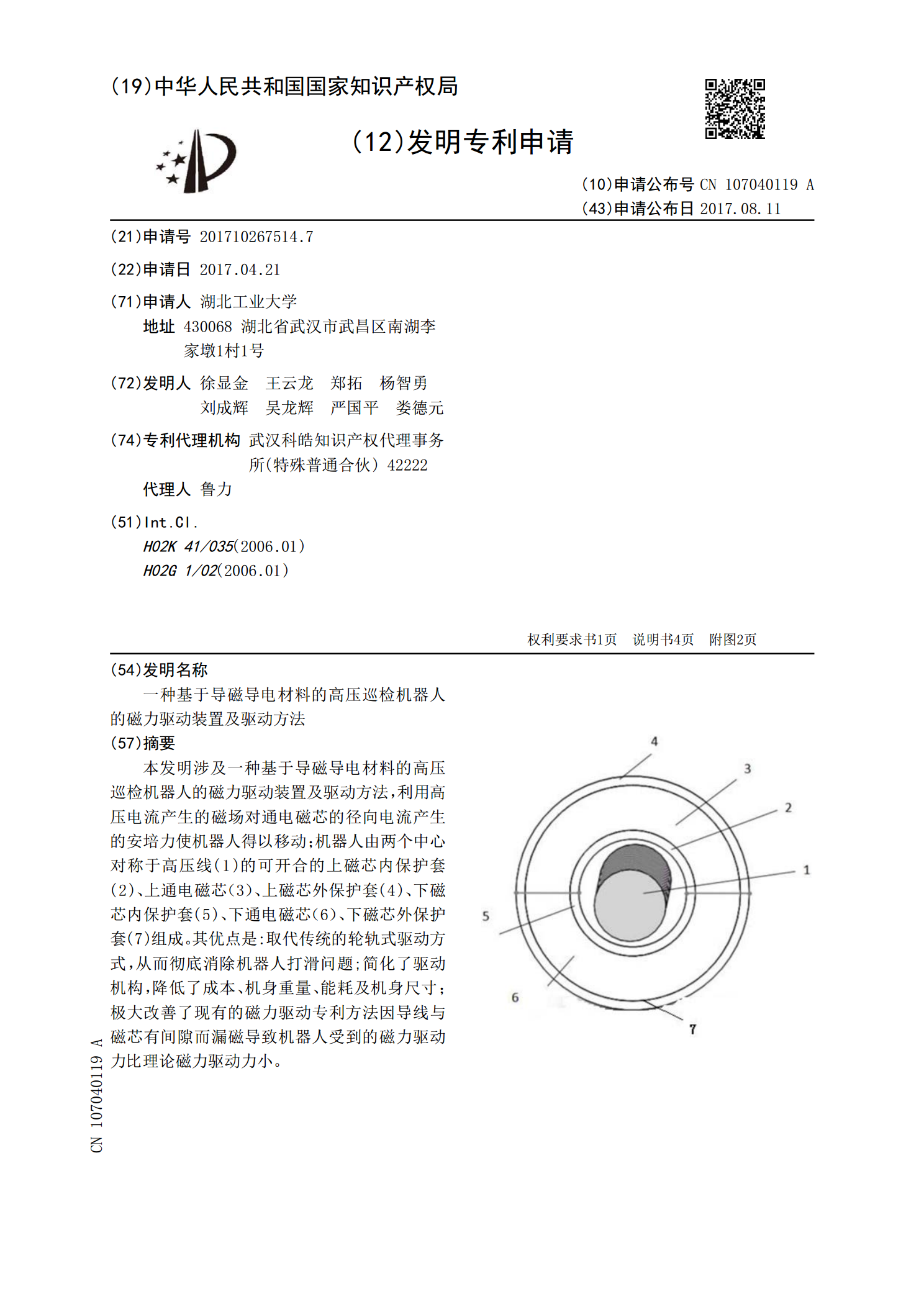
本发明涉及一种基于导磁导电材料的高压巡检机器人的磁力驱动装置及驱动方法,利用高压电流产生的磁场对通电磁芯的径向电流产生的安培力使机器人得以移动;机器人由两个中心对称于高压线(1)的可开合的上磁芯内保护套(2)、上通电磁芯(3)、上磁芯外保护套(4)、下磁芯内保护套(5)、下通电磁芯(6)、下磁芯外保护套(7)组成。其优点是:取代传统的轮轨式驱动方式,从而彻底消除机器人打滑问题;简化了驱动机构,降低了成本、机身重量、能耗及机身尺寸;极大改善了现有的磁力驱动专利方法因导线与磁芯有间隙而漏磁导致机器人受到的磁力
基于导磁导电材料的除冰机器人磁力矩旋转驱动装置.pdf
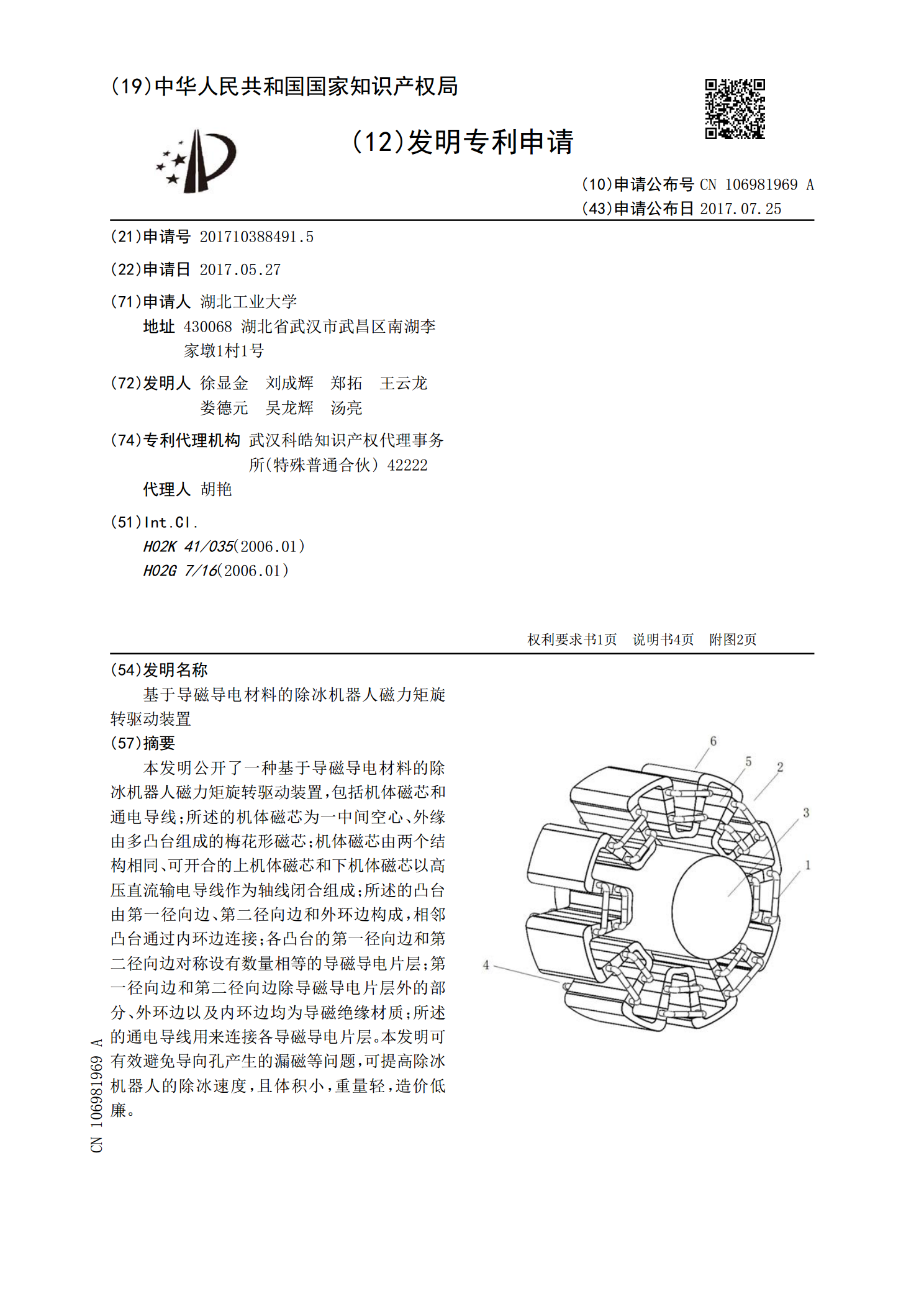
本发明公开了一种基于导磁导电材料的除冰机器人磁力矩旋转驱动装置,包括机体磁芯和通电导线;所述的机体磁芯为一中间空心、外缘由多凸台组成的梅花形磁芯;机体磁芯由两个结构相同、可开合的上机体磁芯和下机体磁芯以高压直流输电导线作为轴线闭合组成;所述的凸台由第一径向边、第二径向边和外环边构成,相邻凸台通过内环边连接;各凸台的第一径向边和第二径向边对称设有数量相等的导磁导电片层;第一径向边和第二径向边除导磁导电片层外的部分、外环边以及内环边均为导磁绝缘材质;所述的通电导线用来连接各导磁导电片层。本发明可有效避免导向孔
巡检机器人的双线圈磁力驱动方法.pptx
汇报人:CONTENTSPARTONEPARTTWO磁场产生与线圈电流的关系双线圈磁力驱动的原理驱动方式的优点驱动方式的缺点PARTTHREE驱动方式的适用范围驱动方式对巡检机器人性能的影响驱动方式对巡检机器人稳定性的影响驱动方式对巡检机器人安全性的影响PARTFOUR线圈设计磁场计算与仿真驱动电路设计驱动程序编写与调试PARTFIVE与传统驱动方式的比较与其他磁力驱动方式的比较双线圈磁力驱动方法的优势与不足PARTSIX技术发展趋势应用领域拓展方向未来研究重点与挑战汇报人:

一种用于高压线路巡检机器人的双线圈磁力驱动装置.pdf
本发明公开了一种用于高压线路巡检机器人的双线圈磁力驱动装置,包括驱动体,所述驱动体由两个中心对称于高压导线且可开合的上驱动机体和下驱动机体组成,其特征在于:所述上驱动机体和下驱动机体均包括磁芯、层片、大矩形线圈和小矩形线圈,所述磁芯和层片沿高压导线的轴向贴合放置,所述大矩形线圈和小矩形线圈交替缠绕在磁芯和层片上,在相同大小尺寸下,相对于现有技术,本发明的双线圈磁力驱动装置驱动力提升达到50%以上,利用高压导线上高压电流产生的磁场对通电线圈的安培力使机器人得以移动,其取代传统的轮轨式驱动方式,从而消除机器人
一种磁力驱动装置.pdf
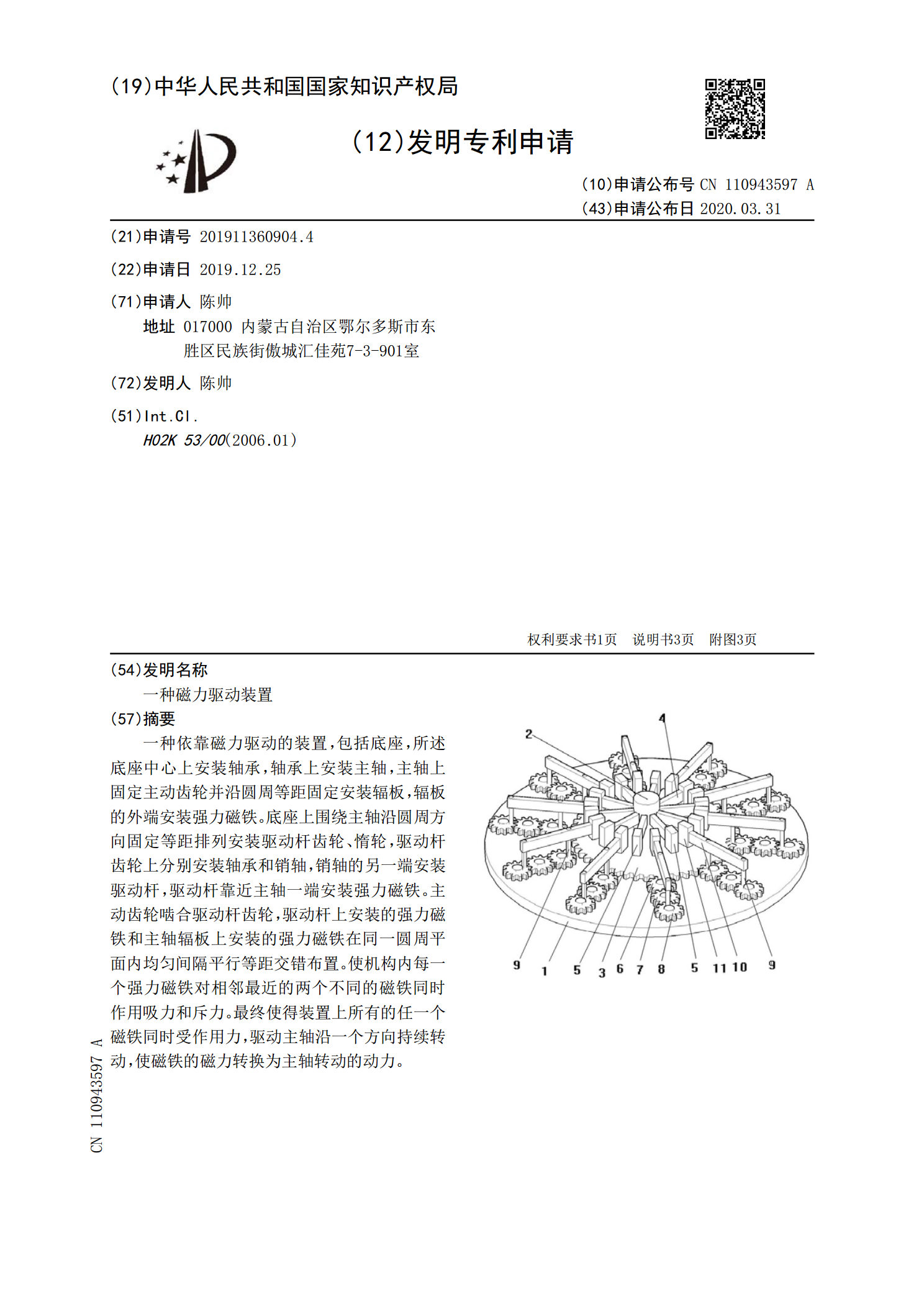
一种依靠磁力驱动的装置,包括底座,所述底座中心上安装轴承,轴承上安装主轴,主轴上固定主动齿轮并沿圆周等距固定安装辐板,辐板的外端安装强力磁铁。底座上围绕主轴沿圆周方向固定等距排列安装驱动杆齿轮、惰轮,驱动杆齿轮上分别安装轴承和销轴,销轴的另一端安装驱动杆,驱动杆靠近主轴一端安装强力磁铁。主动齿轮啮合驱动杆齿轮,驱动杆上安装的强力磁铁和主轴辐板上安装的强力磁铁在同一圆周平面内均匀间隔平行等距交错布置。使机构内每一个强力磁铁对相邻最近的两个不同的磁铁同时作用吸力和斥力。最终使得装置上所有的任一个磁铁同时受作用