
基于导磁导电材料的除冰机器人磁力矩旋转驱动装置.pdf

白真****ng


1/8
2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于导磁导电材料的除冰机器人磁力矩旋转驱动装置.pdf
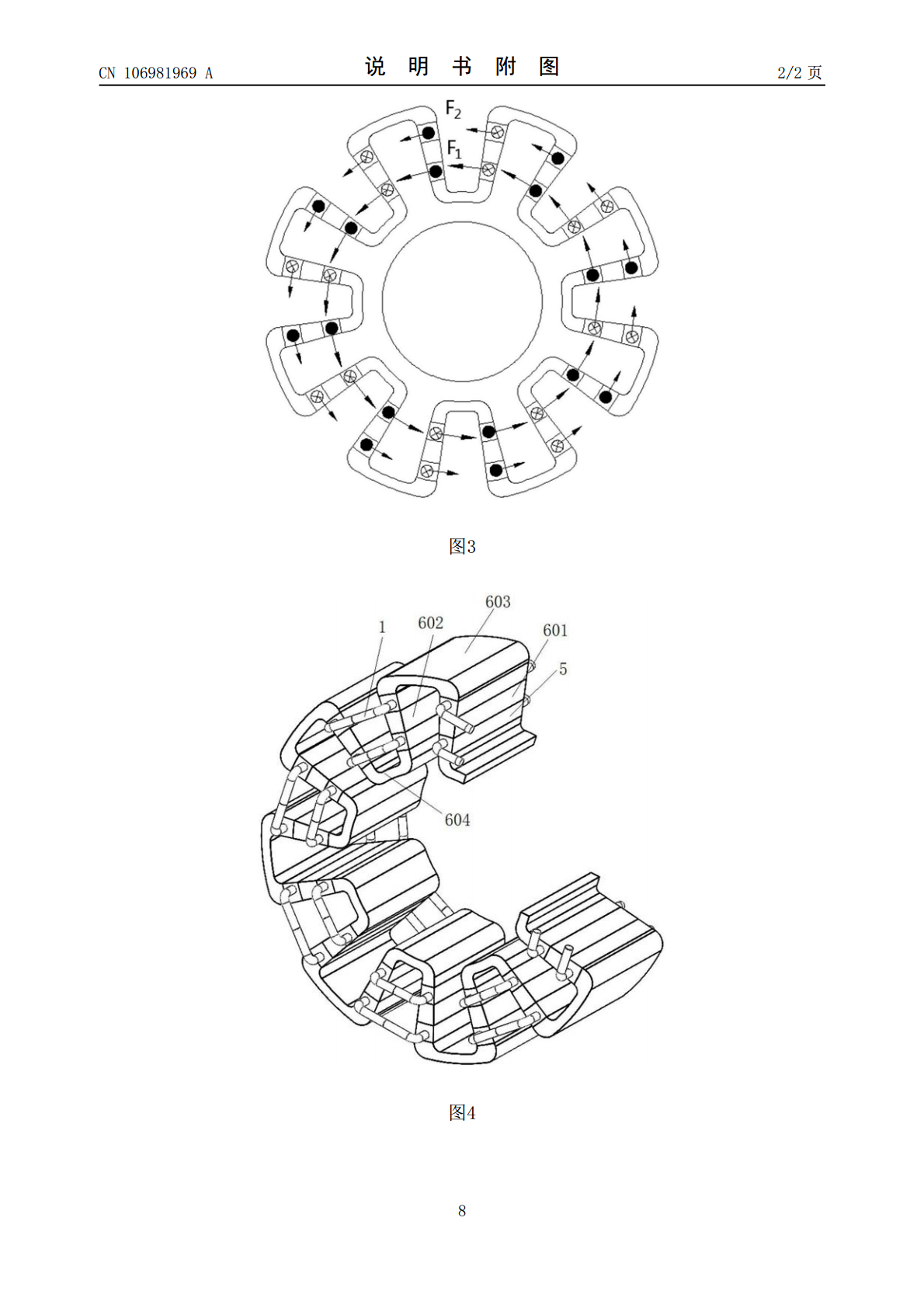
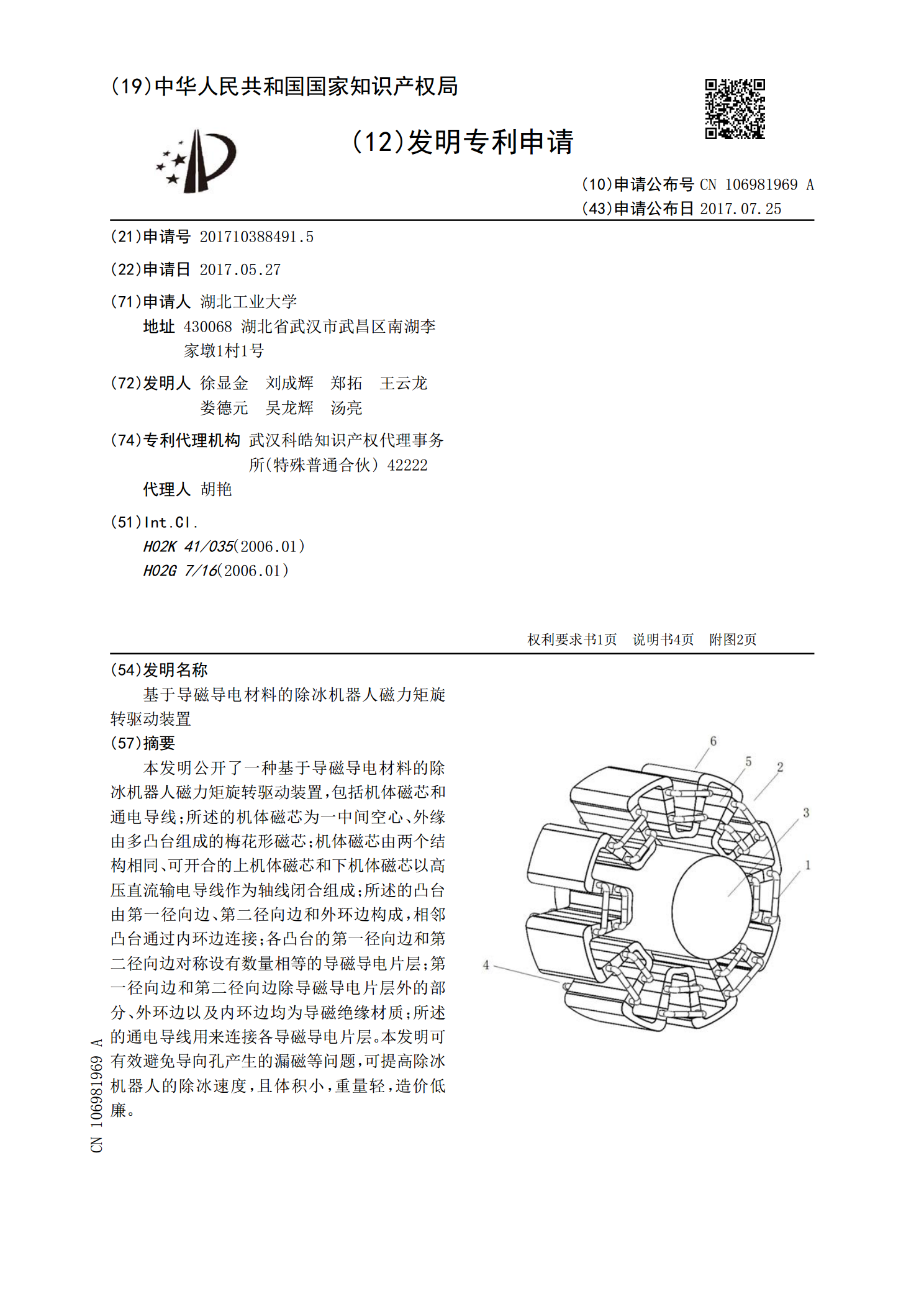
本发明公开了一种基于导磁导电材料的除冰机器人磁力矩旋转驱动装置,包括机体磁芯和通电导线;所述的机体磁芯为一中间空心、外缘由多凸台组成的梅花形磁芯;机体磁芯由两个结构相同、可开合的上机体磁芯和下机体磁芯以高压直流输电导线作为轴线闭合组成;所述的凸台由第一径向边、第二径向边和外环边构成,相邻凸台通过内环边连接;各凸台的第一径向边和第二径向边对称设有数量相等的导磁导电片层;第一径向边和第二径向边除导磁导电片层外的部分、外环边以及内环边均为导磁绝缘材质;所述的通电导线用来连接各导磁导电片层。本发明可有效避免导向孔
一种基于导磁导电材料的高压巡检机器人的磁力驱动装置及驱动方法.pdf
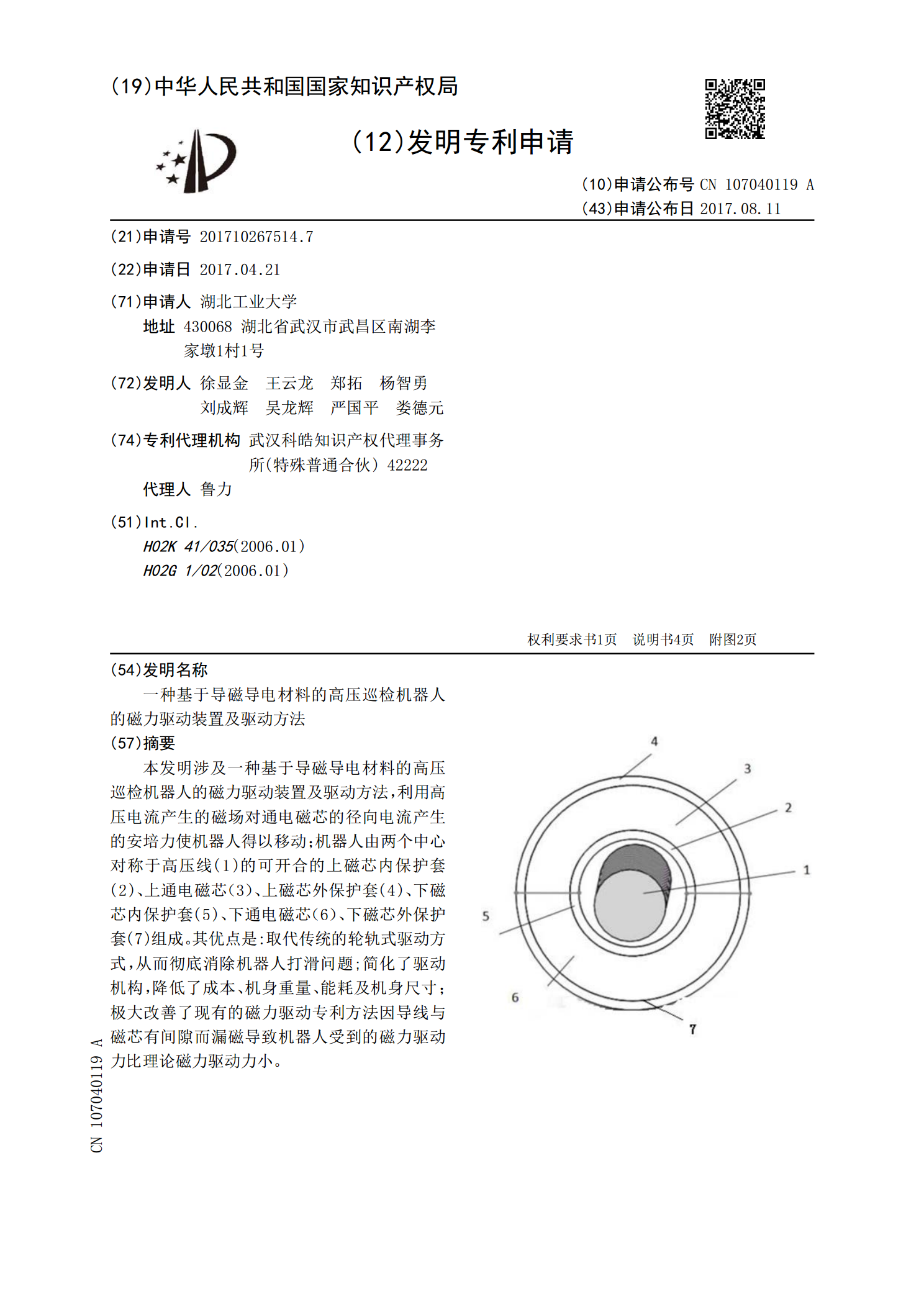
本发明涉及一种基于导磁导电材料的高压巡检机器人的磁力驱动装置及驱动方法,利用高压电流产生的磁场对通电磁芯的径向电流产生的安培力使机器人得以移动;机器人由两个中心对称于高压线(1)的可开合的上磁芯内保护套(2)、上通电磁芯(3)、上磁芯外保护套(4)、下磁芯内保护套(5)、下通电磁芯(6)、下磁芯外保护套(7)组成。其优点是:取代传统的轮轨式驱动方式,从而彻底消除机器人打滑问题;简化了驱动机构,降低了成本、机身重量、能耗及机身尺寸;极大改善了现有的磁力驱动专利方法因导线与磁芯有间隙而漏磁导致机器人受到的磁力

基于旋转装置的磁梯度张量测量方法.docx
基于旋转装置的磁梯度张量测量方法标题:基于旋转装置的磁梯度张量测量方法摘要:本论文旨在研究基于旋转装置的磁梯度张量测量方法。传统的磁梯度测量方法容易受到信号噪声和系统误差的干扰,导致精度下降。为了提高磁梯度测量的精度和稳定性,我们提出了一种新的测量方法,即基于旋转装置的磁梯度张量测量方法。该方法通过旋转装置对探测器进行旋转,利用多个旋转角度下的磁场信号,通过数学模型计算出磁梯度张量,从而减小系统误差并提高测量精度。通过实验证明,该方法可以有效地提高磁梯度测量的精度和稳定性。关键词:磁梯度张量;旋转装置;测

磁动力驱动风力发电装置.pdf
本发明公开了磁动力驱动风力发电装置。由风轮驱动主转体转动,转动过程中第一磁铁和第二磁铁产生相斥力,该相斥力使从转体转动,由于从转体转动时存在惯性,主转体不断转动,相斥力反复作用在从转体,通过运动叠加的模式持续推动从转体,能使从转体高速转动,然后再由高速转动的从转体驱动发电机发电,实现风能—机械能—电能的高效转变过程,具有更低的成本、更小的体积、更环保、更显著的发电效能和更高的发电输出功率。
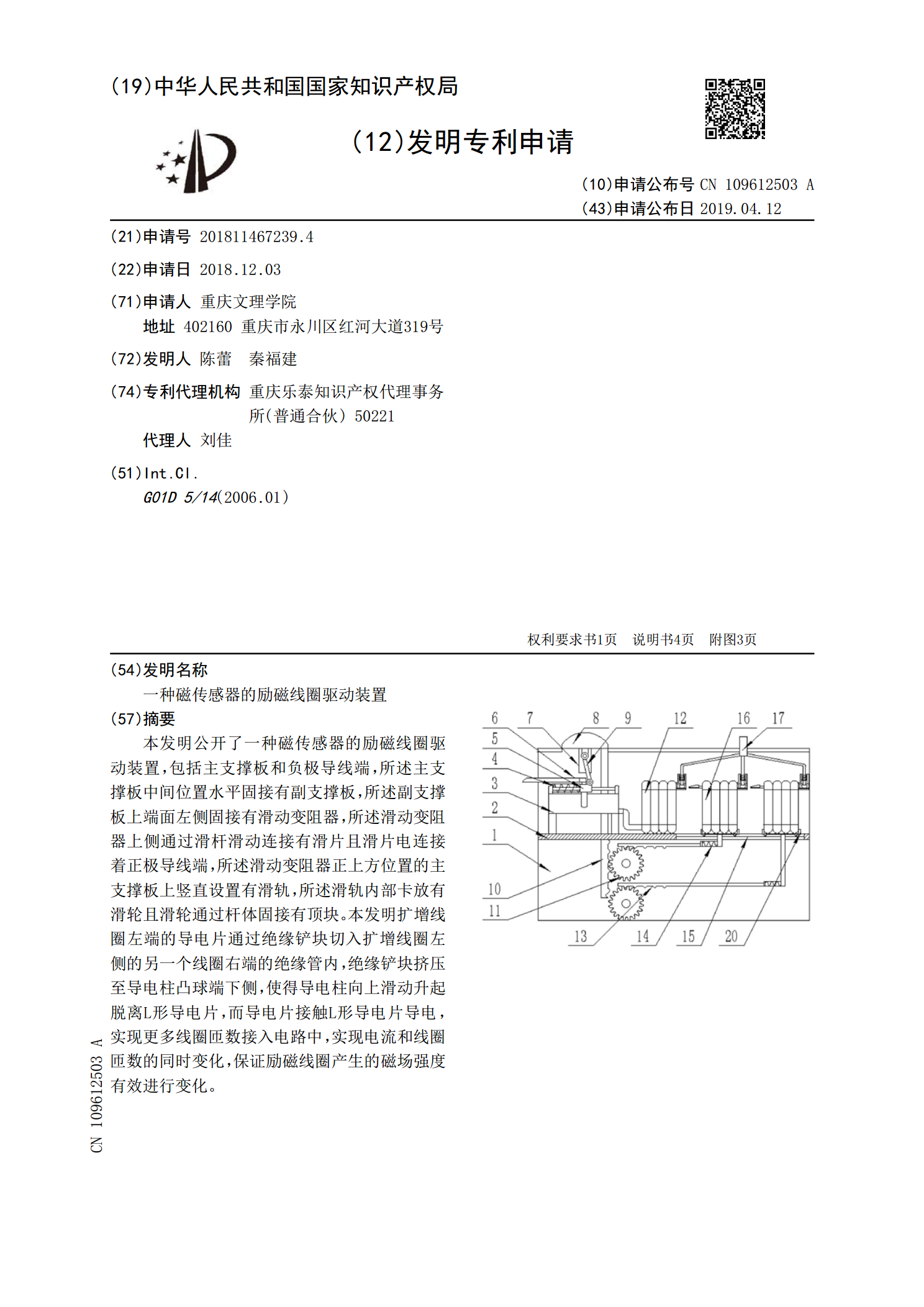
一种磁传感器的励磁线圈驱动装置.pdf
本发明公开了一种磁传感器的励磁线圈驱动装置,包括主支撑板和负极导线端,所述主支撑板中间位置水平固接有副支撑板,所述副支撑板上端面左侧固接有滑动变阻器,所述滑动变阻器上侧通过滑杆滑动连接有滑片且滑片电连接着正极导线端,所述滑动变阻器正上方位置的主支撑板上竖直设置有滑轨,所述滑轨内部卡放有滑轮且滑轮通过杆体固接有顶块。本发明扩增线圈左端的导电片通过绝缘铲块切入扩增线圈左侧的另一个线圈右端的绝缘管内,绝缘铲块挤压至导电柱凸球端下侧,使得导电柱向上滑动升起脱离L形导电片,而导电片接触L形导电片导电,实现更多线圈匝