
步态康复训练装置及其方法.pdf

代瑶****zy

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

步态康复训练装置及其方法.pdf
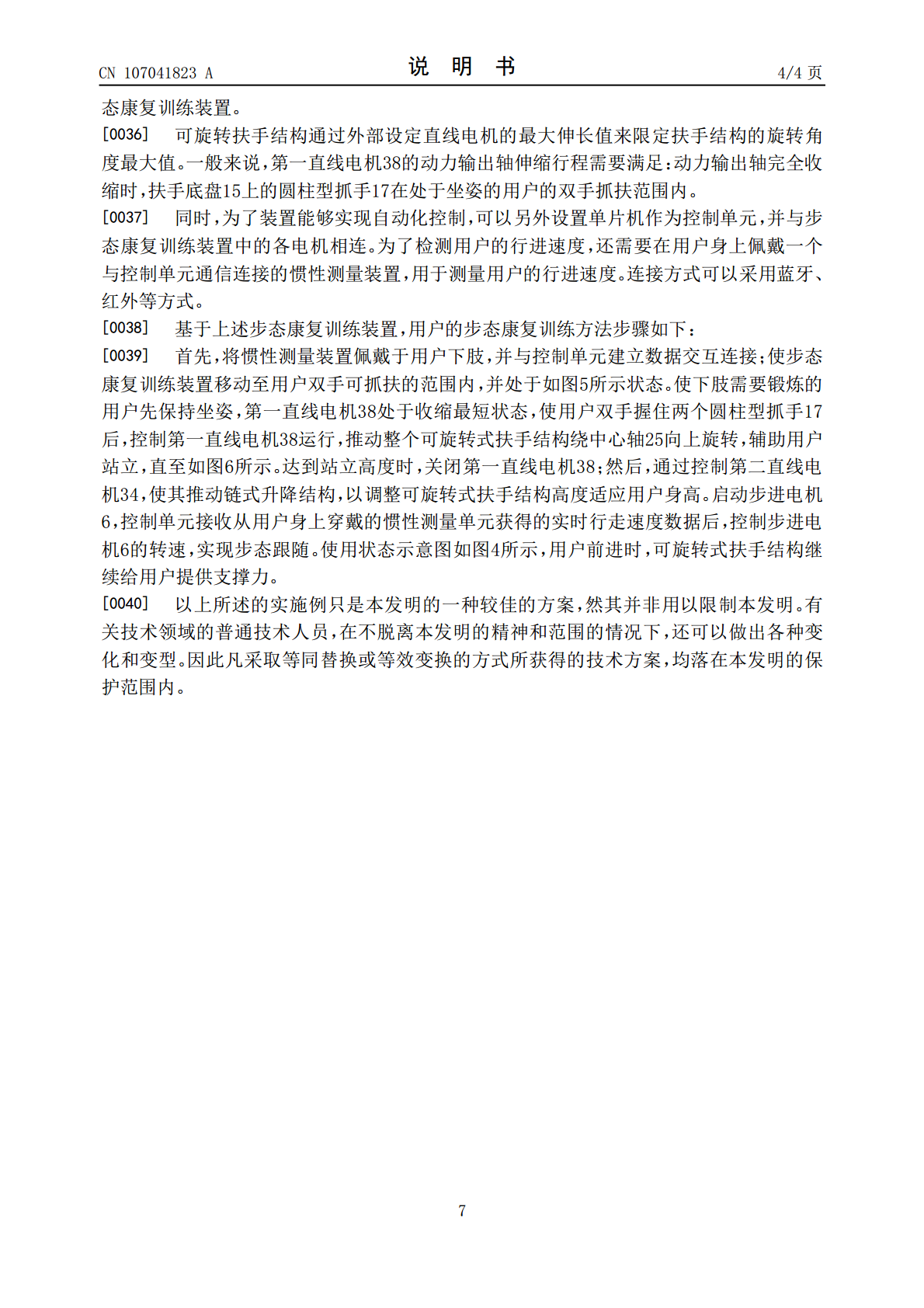
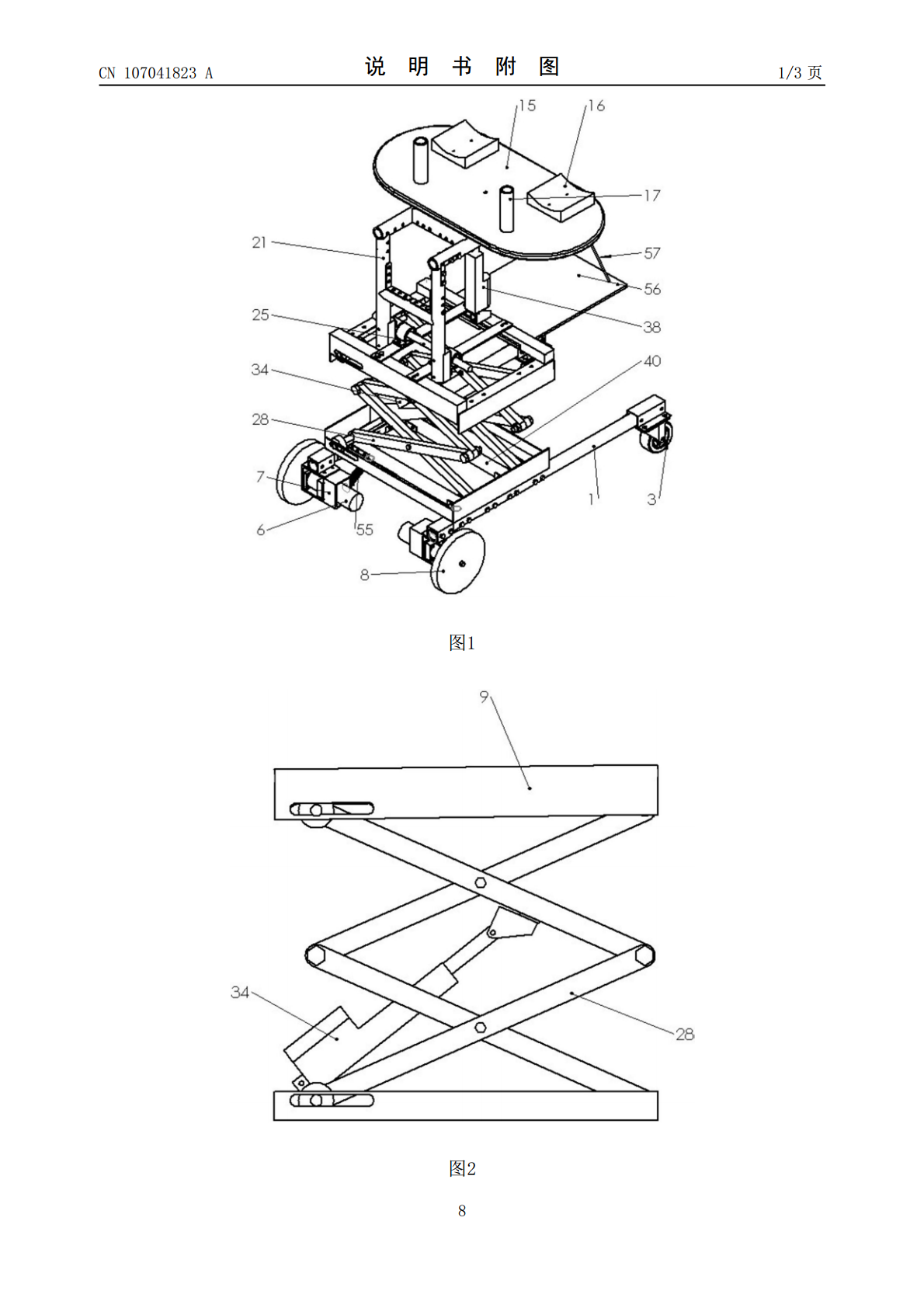
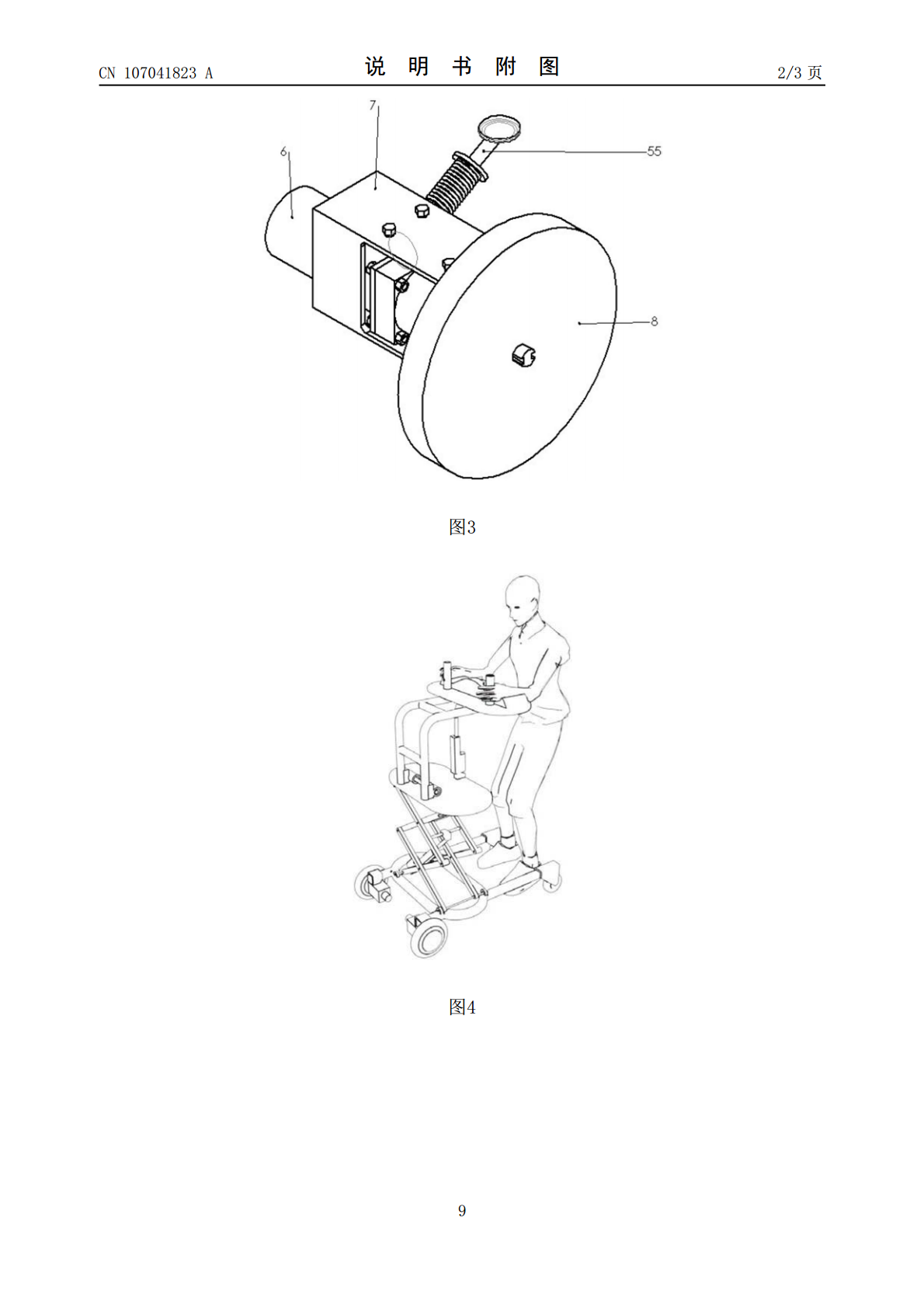
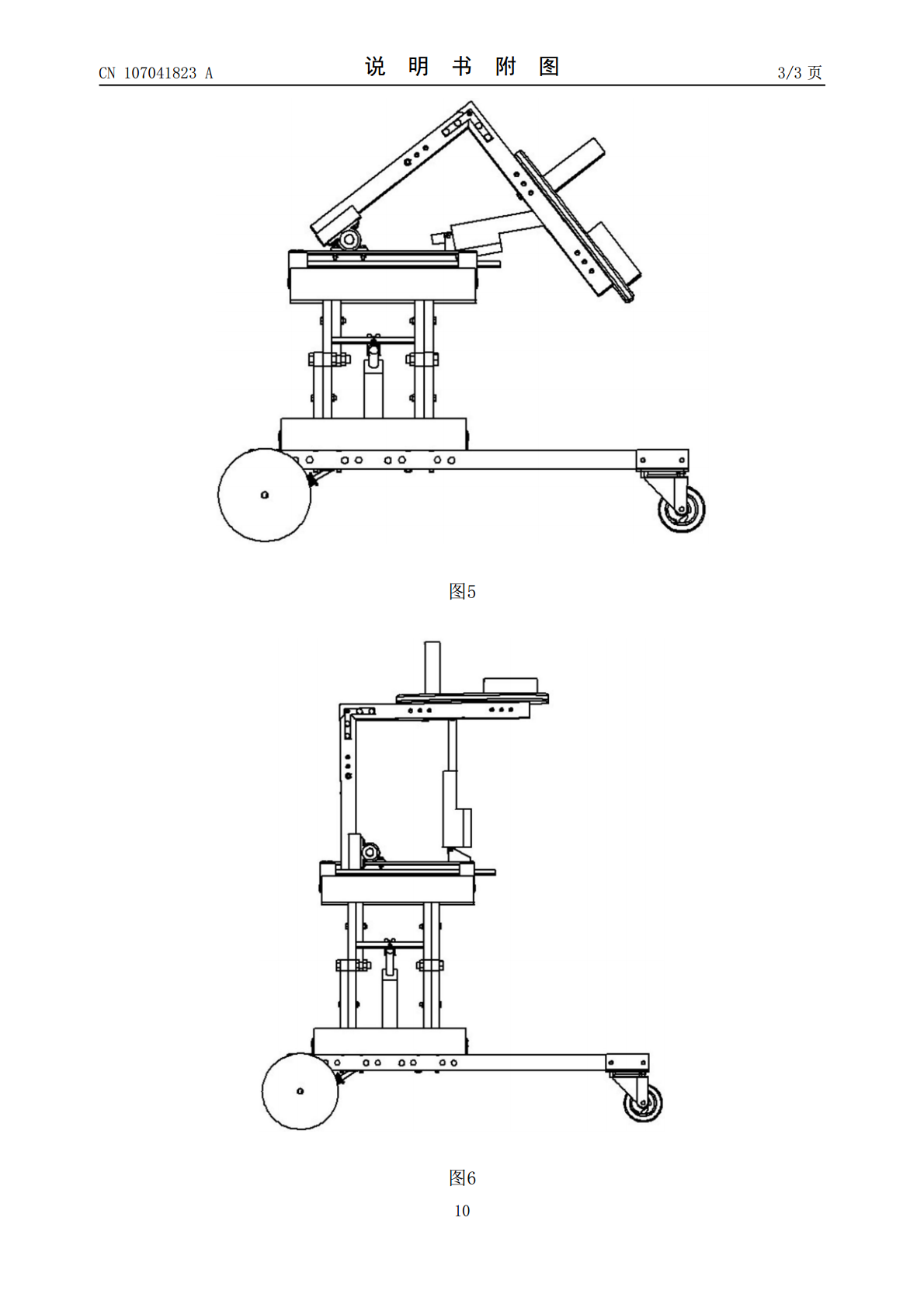
本发明公开了一种步态康复训练装置及其方法,属于医疗器械领域。装置的扶手底盘底部一侧固定于两条直角连接杆上,直角连接杆另一端通过轴承固定于中心轴上,中心轴固定于升降结构上;第一直线电机的机身底部铰接于升降结构上,其动力输出轴顶部铰接于扶手底盘底部;扶手底盘上部两侧均装有圆柱型抓手;所述的升降结构的顶部平台中设置有容纳座椅板的空腔,座椅板与顶部平台构成移动副;升降结构底部搭载于U型车底盘上,U型车底盘的开口朝向用户站立方向;U型车底盘下方设有两个步进电机和四个车轮结构,车轮分为两个前轮和两个后轮,步进电机用于

步态康复训练装置.pdf
本发明属于医疗器械领域,具体公开了一种步态康复训练系统,可用于帮助下肢损伤的患者进行行走的康复训练。本系统在机械结构上由扶手结构、升降结构和车轮结构三部分组成,使用轮毂电机进行驱动,舵机用于转向控制,直线电机进行扶手结构的高度控制。在本系统中,通过设计扶手结构直线和旋转两个自由度,使用锁定装置进行扶手结构自由度的控制,设计电机轴安装法兰盘解决电机运动不同步的问题等一系列的设计,保证了本步态康复训练系统的安全可靠性和人机和谐性。患者不需要负重即可进行康复训练;占用体积小,能够在较小的空间进行康复训练,并支持
一种步态康复训练装置.pdf
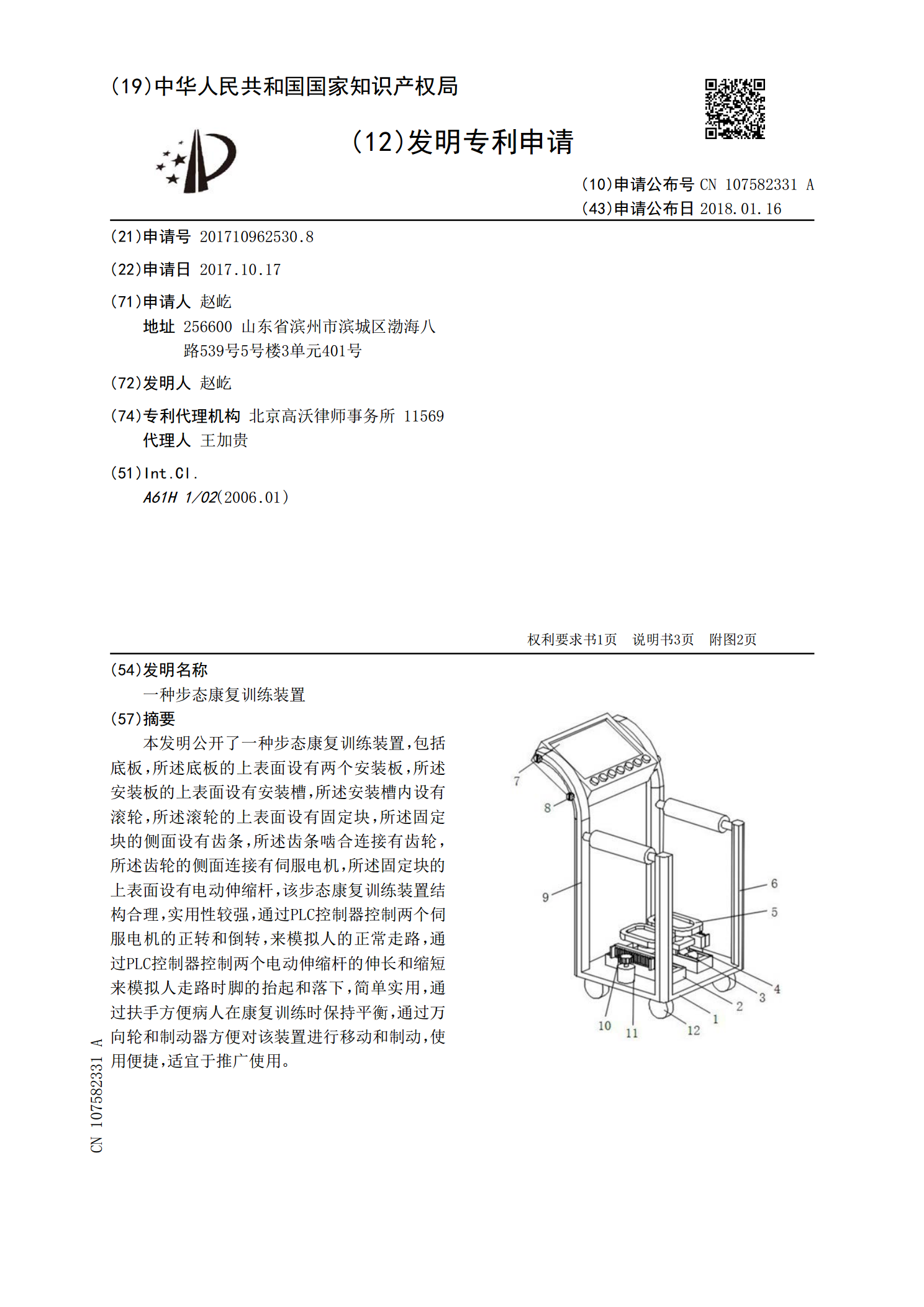
本发明公开了一种步态康复训练装置,包括底板,所述底板的上表面设有两个安装板,所述安装板的上表面设有安装槽,所述安装槽内设有滚轮,所述滚轮的上表面设有固定块,所述固定块的侧面设有齿条,所述齿条啮合连接有齿轮,所述齿轮的侧面连接有伺服电机,所述固定块的上表面设有电动伸缩杆,该步态康复训练装置结构合理,实用性较强,通过PLC控制器控制两个伺服电机的正转和倒转,来模拟人的正常走路,通过PLC控制器控制两个电动伸缩杆的伸长和缩短来模拟人走路时脚的抬起和落下,简单实用,通过扶手方便病人在康复训练时保持平衡,通过万向轮

一种步态康复训练装置.pdf
本发明公开了一种步态康复训练装置,包括底座,所述底座的一边设有两个中空结构的母杆,且母杆内滑动安装有中空结构的子杆,且母杆的外壁上设有延伸至母杆内的固定螺栓,所述子杆的一侧内壁上固定有电动机,且两个子杆相邻一侧外壁上均转动连接有轮毂,轮毂连接有位于子杆内且与子杆内壁转动连接的滚轴,两个子杆之间转动连接有螺杆,且螺杆上套接有舵,且螺杆的两端分别与滚轴通过皮带传动连接,两个轮毂相邻一侧的外壁上均设有连接杆。本发明能够模拟人体下肢运动对患者的下肢进行上下和前后牵引运动,辅助校准下肢骨骼,能够在患者处于不同的康复
异常步态矫正减重步态重塑训练装置及其使用方法.pdf
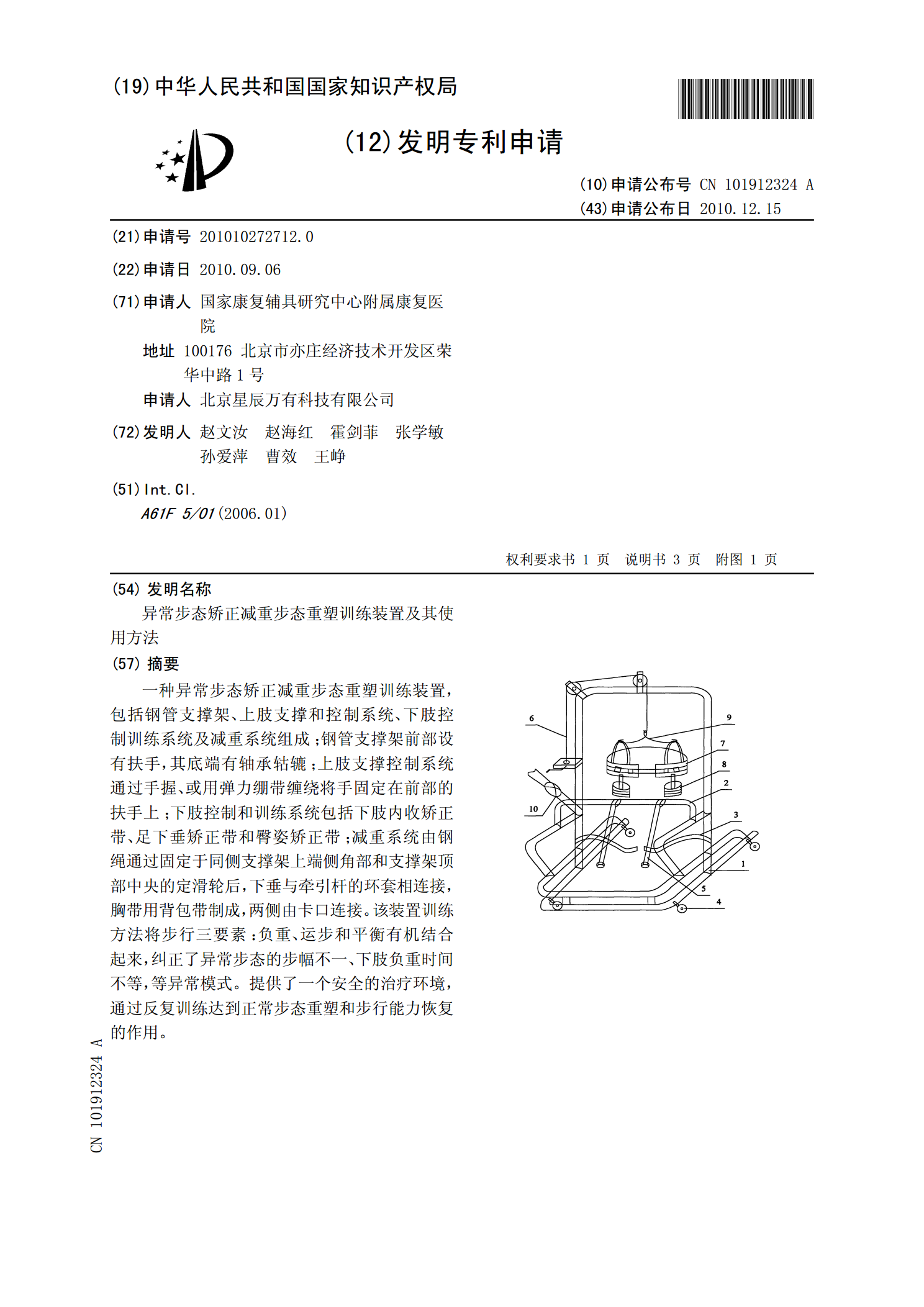
一种异常步态矫正减重步态重塑训练装置,包括钢管支撑架、上肢支撑和控制系统、下肢控制训练系统及减重系统组成;钢管支撑架前部设有扶手,其底端有轴承轱辘;上肢支撑控制系统通过手握、或用弹力绷带缠绕将手固定在前部的扶手上;下肢控制和训练系统包括下肢内收矫正带、足下垂矫正带和臀姿矫正带;减重系统由钢绳通过固定于同侧支撑架上端侧角部和支撑架顶部中央的定滑轮后,下垂与牵引杆的环套相连接,胸带用背包带制成,两侧由卡口连接。该装置训练方法将步行三要素:负重、运步和平衡有机结合起来,纠正了异常步态的步幅不一、下肢负重时间不等