
一种汽车转向稳定性控制系统及其控制方法.pdf

一条****贺6


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种汽车转向稳定性控制系统及其控制方法.pdf
本发明公开了一种汽车稳定性控制系统及其控制方法,该系统包括齿轮齿条转向器、助力电机、蜗轮蜗杆、转向电机、双行星排齿轮机构、电子控制单元ECU、方向盘转矩传感器、方向盘转角传感器车速传感器、横摆角速度传感器、质心侧偏角传感器、侧向加速度传感器和前轮转角传感器。在汽车行驶过程中,各传感器实时采集所测得信号并将其送入到电子控制单元ECU,ECU运行预先设定的程序对其进行处理,并输出角位移信号与力矩信号到转向电机与助力电机,来带动双行星排与蜗轮蜗杆,最终控制汽车前轮的运动,以实现对汽车横摆运动的控制。本发明能够实

一种汽车转向控制系统及其控制方法.pdf
本发明涉及一种汽车转向控制系统及其控制方法,包括汽车转向控制系统,包括安装于方向盘和汽车转向传动机构之间的行星轮系装置、设置于汽车前方的摄像头以及设置于车辆两侧身的雷达;汽车ECU分别与行星轮系装置、摄像头以及雷达通信连接;摄像头对行驶车道两边的线条进行监控;摄像头将拍摄到的线条信息传送给汽车ECU,雷达向转向侧的后方发射雷达信号,将与后方的车辆距离信息传送给汽车ECU,汽车ECU控制行星轮系装置的启闭;行星轮系装置实现车辆低速辅助转向或车辆高速制约转向。本发明能够在不同行车状态下起到转向保护作用,使得汽
一种汽车转向控制系统、汽车及控制方法.pdf
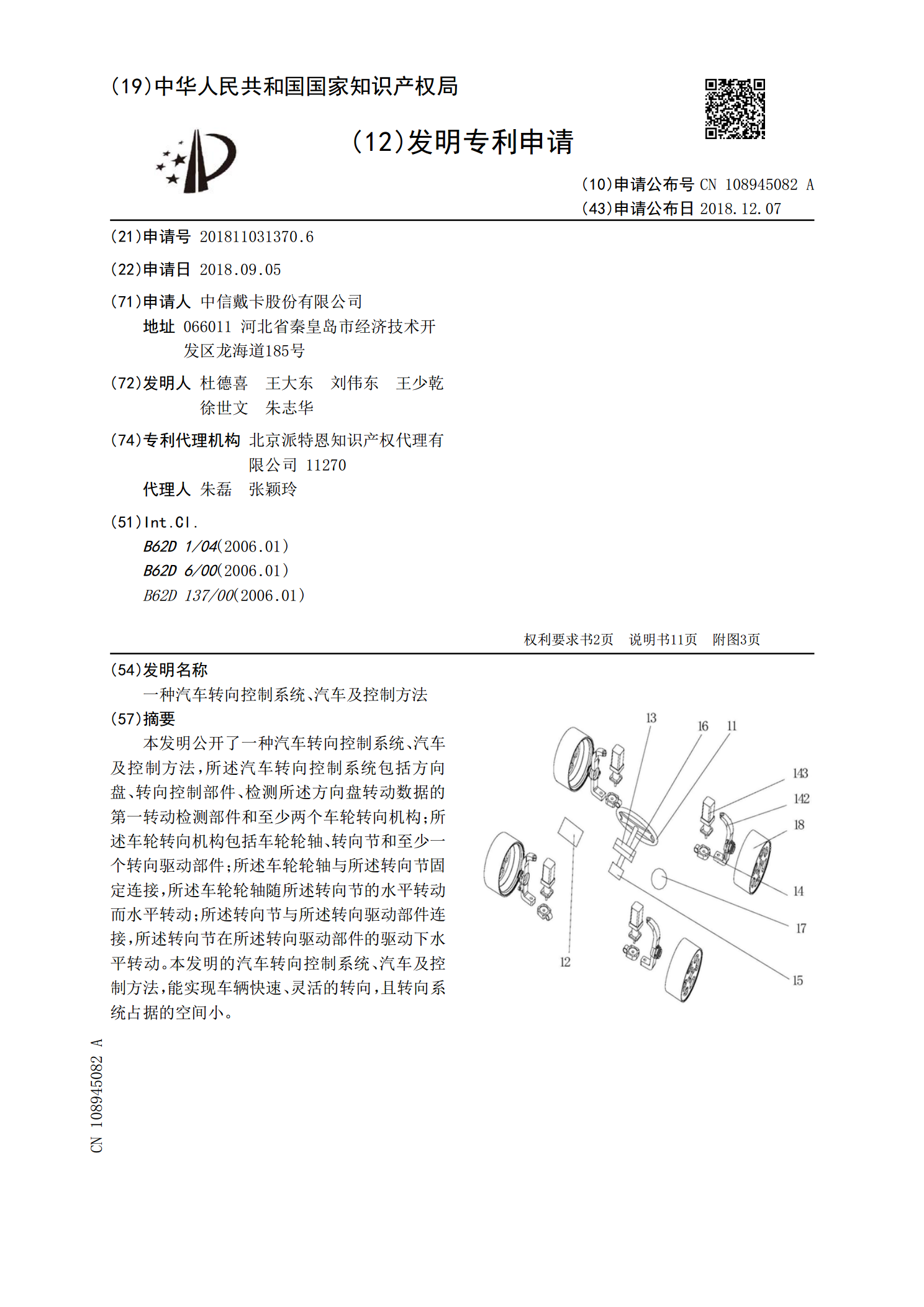
本发明公开了一种汽车转向控制系统、汽车及控制方法,所述汽车转向控制系统包括方向盘、转向控制部件、检测所述方向盘转动数据的第一转动检测部件和至少两个车轮转向机构;所述车轮转向机构包括车轮轮轴、转向节和至少一个转向驱动部件;所述车轮轮轴与所述转向节固定连接,所述车轮轮轴随所述转向节的水平转动而水平转动;所述转向节与所述转向驱动部件连接,所述转向节在所述转向驱动部件的驱动下水平转动。本发明的汽车转向控制系统、汽车及控制方法,能实现车辆快速、灵活的转向,且转向系统占据的空间小。

一种汽车转向灯自动控制系统及其控制方法.pdf
本发明揭示了一种汽车转向灯自动控制系统,该控制系统将采集左、右轮速信号经过电控单元传送至ECU,并由ECU根据此轮速信号驱动左、右灯继电器控制组合开关实现左、右转向灯组的启闭。此控制系统能够精确的控制转向灯,即使微小的转向操作也能准确开启,并且此自动控制系统与手动操纵杆同共存控制转向灯,使得驾驶人员对转向灯操作更便捷。

一种工程机械及其转向控制方法、转向控制系统.pdf
本发明公开了一种工程机械的转向控制方法,包括如下步骤:1)判断工程机械是否需要转向,若是,进入步骤2);若不是,进入步骤3);2)判断内侧驱动轮、外侧驱动轮的当前转速是否均小于预设值;若是,进入步骤4);若不是,进入步骤5);3)保持内侧电机、外侧电机的转速一致;4)输入第一请求转向半径和第一请求负荷度,获取并输出内侧电机的第一扭矩和外侧电机的第一扭矩,以及内侧制动器的扭矩和外侧制动器的扭矩;5)输入第二请求转向半径和第二请求负荷度,根据第二请求转向半径获取并输出内侧电机的第二扭矩,根据第二请求转向半径和