
一种基于参数估计的线控转向控制系统及控制方法.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于参数估计的线控转向控制系统及控制方法.pdf
本发明公开了一种基于参数估计的线控转向控制系统及控制方法。该系统包括方向盘及其连接机构、方向盘转角传感器、方向盘转矩传感器、路感电机、路感电机电流传感器、转向电机、转向电机电流传感器、车速传感器、前轮转角传感器、齿轮齿条转向器、位置传感器、转向电子控制单元、传感器信号整合模块以及电机电流控制模块。本发明运用粒子滤波器对汽车运动的姿态进行滤波预测估计,粒子滤波器通过电子传感器获得信号,进而运用粒子滤波估计算法得到汽车的运动参数。本发明所公开的系统的转向控制器能够在保证转向稳定的前提下,有效地减少外界随机干扰
车辆及其线控转向控制系统、方法.pdf
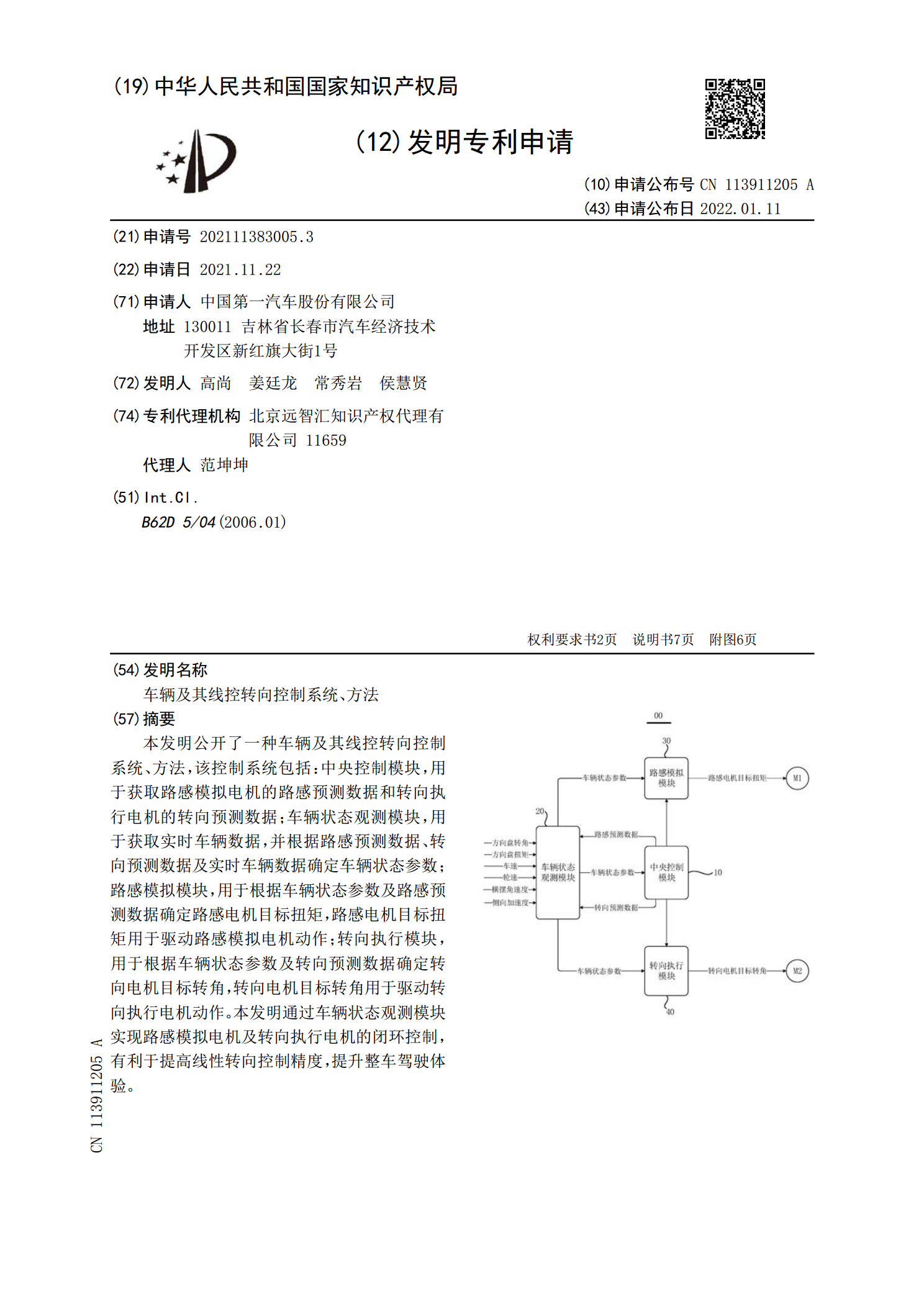
本发明公开了一种车辆及其线控转向控制系统、方法,该控制系统包括:中央控制模块,用于获取路感模拟电机的路感预测数据和转向执行电机的转向预测数据;车辆状态观测模块,用于获取实时车辆数据,并根据路感预测数据、转向预测数据及实时车辆数据确定车辆状态参数;路感模拟模块,用于根据车辆状态参数及路感预测数据确定路感电机目标扭矩,路感电机目标扭矩用于驱动路感模拟电机动作;转向执行模块,用于根据车辆状态参数及转向预测数据确定转向电机目标转角,转向电机目标转角用于驱动转向执行电机动作。本发明通过车辆状态观测模块实现路感模拟电
一种用于线控转向汽车主动前轮转向控制系统的控制方法.pdf
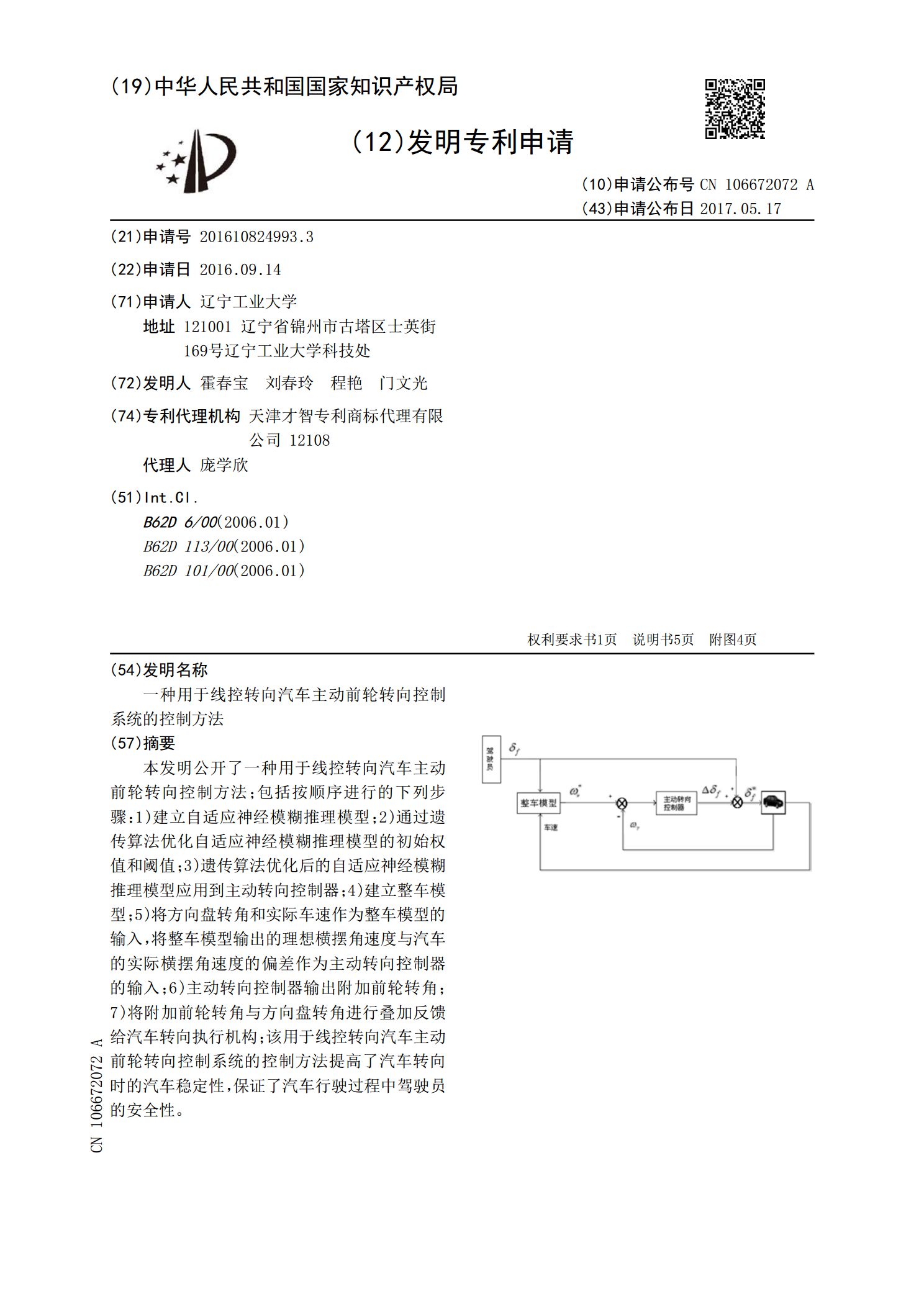
本发明公开了一种用于线控转向汽车主动前轮转向控制方法;包括按顺序进行的下列步骤:1)建立自适应神经模糊推理模型;2)通过遗传算法优化自适应神经模糊推理模型的初始权值和阈值;3)遗传算法优化后的自适应神经模糊推理模型应用到主动转向控制器;4)建立整车模型;5)将方向盘转角和实际车速作为整车模型的输入,将整车模型输出的理想横摆角速度与汽车的实际横摆角速度的偏差作为主动转向控制器的输入;6)主动转向控制器输出附加前轮转角;7)将附加前轮转角与方向盘转角进行叠加反馈给汽车转向执行机构;该用于线控转向汽车主动前轮转

线控转向控制系统、方法、车辆及存储介质.pdf
本申请实施例提供线控转向控制系统、方法、车辆及存储介质。该系统包括:控制器、主线控转向组件和备线控转向组件。控制器与第一上转向组件和第二下转向组件电信号连接;第一下转向组件与第二下转向组件通过电信号连接保持转向轮转角信息同步;第一上转向组件与机械阻尼组件通过机械连接保持手感反馈力矩同步。通过上述技术方案,当第一上转向组件发生故障的时候,会利用机械阻尼组件临时替代第一上转向组件为方向盘提供手感反馈力矩,作为在第一上转向组件发生故障的情况下的替补方案。在备线控转向组件中,利用机械阻尼组件替代线控系统中第一上转
一种基于自适应跟踪控制的线控转向系统及控制方法.pdf
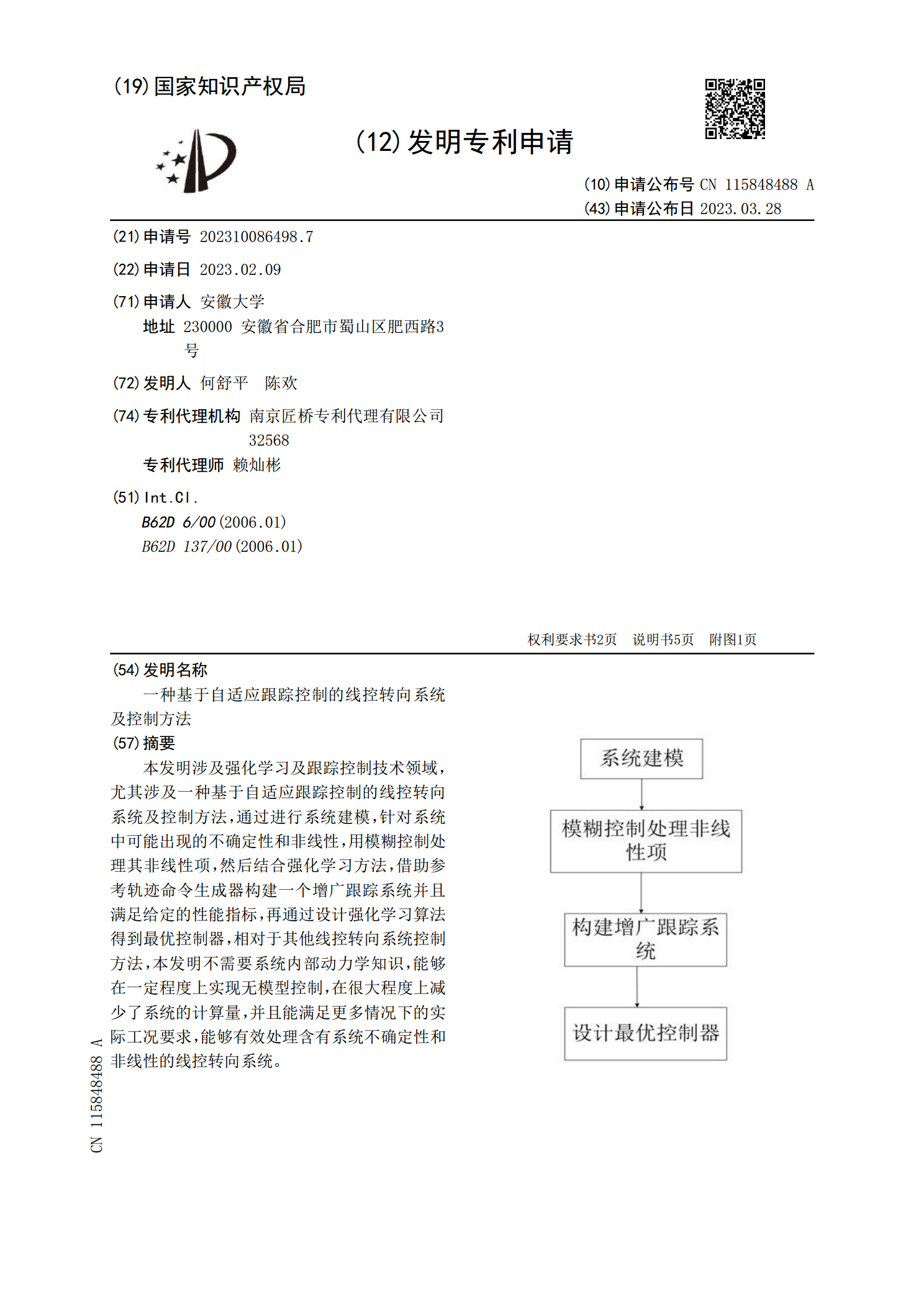
本发明涉及强化学习及跟踪控制技术领域,尤其涉及一种基于自适应跟踪控制的线控转向系统及控制方法,通过进行系统建模,针对系统中可能出现的不确定性和非线性,用模糊控制处理其非线性项,然后结合强化学习方法,借助参考轨迹命令生成器构建一个增广跟踪系统并且满足给定的性能指标,再通过设计强化学习算法得到最优控制器,相对于其他线控转向系统控制方法,本发明不需要系统内部动力学知识,能够在一定程度上实现无模型控制,在很大程度上减少了系统的计算量,并且能满足更多情况下的实际工况要求,能够有效处理含有系统不确定性和非线性的线控转